1
Изобретение относится к области землеройных машин, а именно, к гидроприводу управления экскаваторным оборудованием.
Известен экскаватор, включающий базовую машину, стрелу, рукоять, гидропривод и управляюш,ее устройство, выполненное с электрической аналоговой счетно-решаюш;ей схемой, связанной со стрелой и рукоятью 1.
Недостатком известного устройства является невысокая точность управления положением ковша.
Известен гидропривод управления экскаваторным оборудованием, содержаш;ий гидроцилиндры стрелы, рукояти и ковша, соединенные напорными и сливными магистралями с распределительным блоком, гидроцилиндры-датчики положения стрелы, рукояти и ковша, связанные через гидроприемный блок с датчиком глубины копания 2.
Недостатком описанного гидропривода управления экскаваторным оборудованием является также невысокая точность управления положением ковша.
Цель изобретения - повышение точности управления положением ковша.
Указанная цель достигается за счет того, что гидропривод снабжен гидроцилиндромдатчиком положения платформы экскаватора, связанным с магистралями гидроцилиндра-датчика положения стрелы, причем задатчик глубины копания выполнен в виде следящего гидрораспределителя, который связан с распределительным блоком. Гидроприемный блок выполнен из нескольких гидроцилиндров-приемникоБ, связанных с соответствующими гидроцилиндрами датчиками положения стрелы рукояти
10 и ковша, и следящий гидрораспределитель - из двух золотников, связанных механически со штоками гидроцилиндров-приемников. Кроме того, гидроприемный блок может быть выполнен из одного цилиндра15 приемника, а следящий гидрораспределитель - в виде золотника, имеющего со штоком гидроцилиндра-приемника электрическую связь.
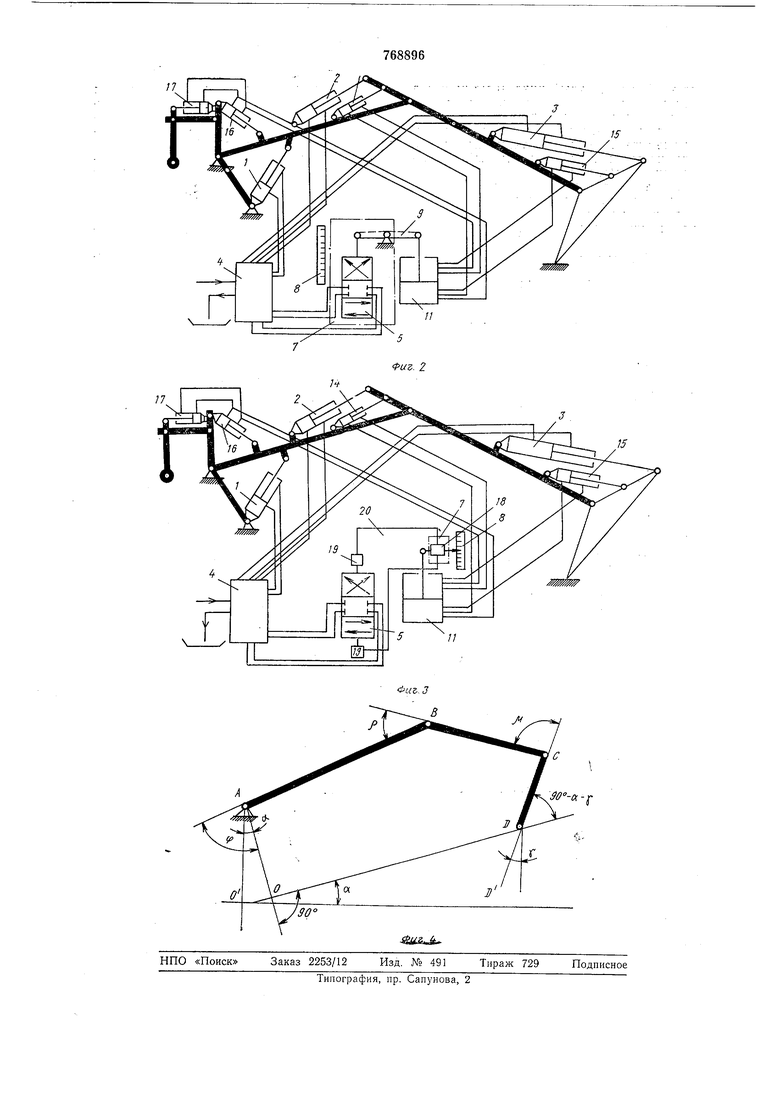
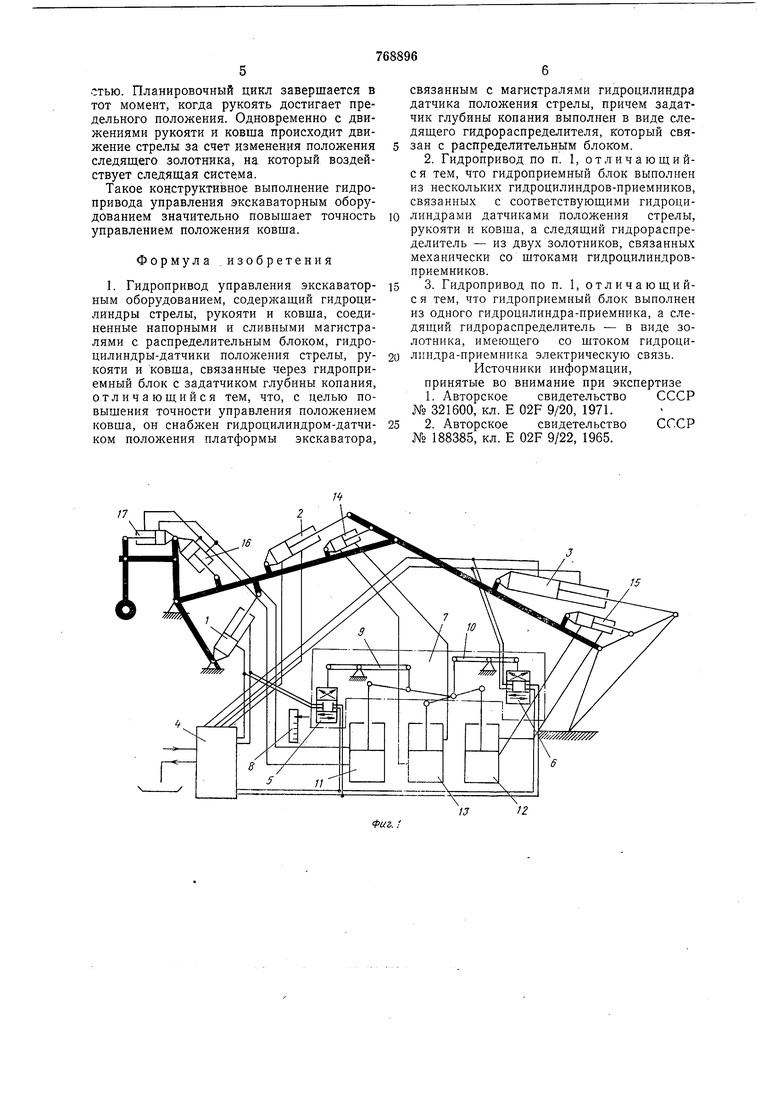
На фиг. 1 изображена схема гидропривода, гидроприемный блок выполнен из нескольких гидроцилиндров-приемников; на фиг. 2 - то же, гидроприемный блок выполнен из одного гидроцилиндра-приемника; на фиг. 3 - то же, следящий золотник
25 связан с гидроцилиндром-приемником электрической связью; на фиг. 4 - замкнутый геометрический контур звеньев рабочего оборудования.
Гидропривод включает силовые гидроци30 линдры 1, 2, 3, соединенные гидравлически
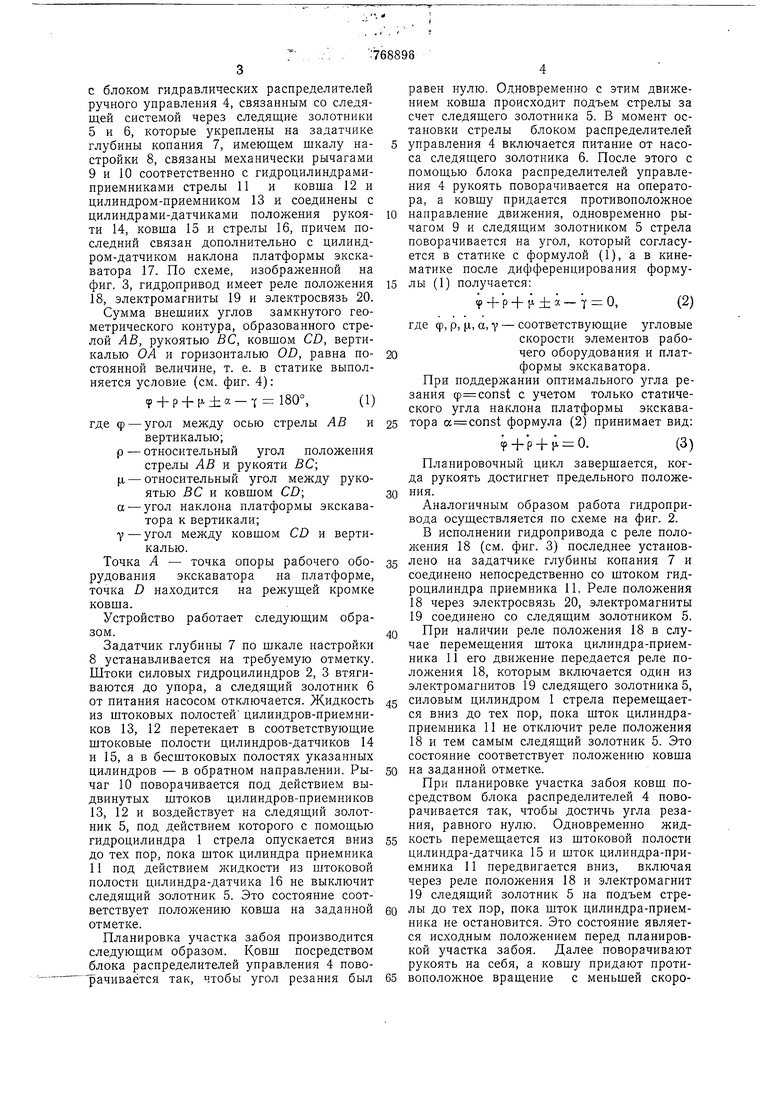
с блоком гидравлических распределителей ручного управления 4, связанным со следящей системой через следящие золотники 5 и 6, которые укреплены на задатчике глубины копания 7, имеющем шкалу настройки 8, связаны механически рычагами 9 и 10 соответственно с гидроцилиндрамиприемниками стрелы 11 и ковша 12 и цилиндром-приемником 13 и соединены с цилиндрами-датчиками положения рукояти 14, ковша 15 и стрелы 16, причем последний связан дополнительно с цилиндром-датчиком наклона платформы экскаватора 17. По схеме, изображенной на фиг. 3, гидр.оцривод имеет реле положения 18, электромагниты 19 и электросвязь 20. Сумма внешних углов замкнутого геометрического контура, образованного стрелой АВ, рукоятью ВС, ковшом CD, вертикалью ОА и горизонталью OD, равна постоянной величине, т. е. в статике выполняется условие (см. фиг. 4):
+ P + f-±«-T-180°,(1)
где ф - угол между осью стрелы АВ и
вертикалью; р - относительный угол положения
стрелы АВ и рукояти В С; д, - относительный угол между рукоятью ВС и ковшом CD; а - угол наклона нлатформы экскаватора к вертикали;
Y - угол между ковшом CD и вертикалью.
Точка А - точка опоры рабочего оборудования экскаватора на платформе, точка D находится на режущей кромке ковша.
Устройство работает следуюшим образом.
Задатчик глубины 7 по шкале настройки 8 устанавливается на требуемую отметку. Штоки силовых гидроцилиндров 2, 3 втягиваются до упора, а следящий золотник 6 от питания насосом отключается. Жидкость из штоковых полостей цилиндров-приемников 13, 12 перетекает в соответствующие штоковые полости цилиндров-датчиков 14 и 15, а в бесштоковых полостях указанных цилиндров - в обратном направлении. Рычаг 10 поворачивается под действием выдвинутых штоков цилиндров-приемников 13, 12 и воздействует на следящий золотник 5, под действием которого с помощью гидроцилиндра 1 стрела опускается вниз до тех пор, пока щток цилиндра приемника 11 под действием жидкости из щтоковой полости цилиндра-датчика 16 не выключит следящий золотник 5. Это состояние соответствует положению ковща на заданной отметке.
Планировка участка забоя производится
следующим образом. Ковш посредством
блока распределителей управления 4 повор ачиваётся так, чтобы угол резания был
равен нулю. Одновременно с этим движением ковша происходит подъем стрелы за счет следяшего золотника 5. В момент остановки стрелы блоком распределителей
управления 4 включается питание от насоса следящего золотника 6. После этого с помощью блока распределителей управления 4 рукоять поворачивается на оператора, а ковшу придается противоположное
направление движения, одновременно рычагом 9 и следящим золотником 5 стрела поворачивается на угол, который согласуется в статике с формулой (1), а в кинематике после дифференцирования формулы (1) получается:
+ 0,(2)
где ф, р, (Л, а, 7 - соответствующие угловые скорости элементов рабочего оборудования и платформы экскаватора.
При поддержании оптимального угла резания ф: const с учетом только статического угла наклона платформы экскаватора a :const формула (2) принимает вид:
+ Н- 0.(3)
Планировочный цикл завершается, когда рукоять достигнет предельного положения.
Аналогичным образом работа гидропривода осуществляется по схеме на фиг. 2.
В исполнении гидропривода с реле положения 18 (см. фиг. 3) последнее установлено на задатчике глубины копания 7 и соединено непосредственно со штоком гидроцилиндра приемника И. Реле положения
18через электросвязь 20, электромагниты
19соединено со следящим золотником 5. При наличии реле положения 18 в случае перемещения штока цилиндра-приемника 11 его движение передается реле положения 18, которым включается один из электромагнитов 19 следящего золотника 5,
силовым цилиндром 1 стрела перемещается вниз до тех пор, пока шток цилиндраприемника И не отключит реле положения
18и тем самым следящий золотник 5. Это состояние соответствует положению ковща
на заданной отметке.
При планировке участка забоя ковщ посредством блока распределителей 4 поворачивается так, чтобы достичь угла резания, равного нулю. Одновременно жидкость перемещается из щтоковой полости цилиндра-датчика 15 и щток цилиндра-приемника 11 передвигается вниз, включая через реле положения 18 и электромагнит
19следящий золотник 5 на подъем стрелы до тех пор, пока шток цилиндра-приемника не остановится. Это состояние является исходным положением перед планировкой участка забоя. Далее поворачивают рукоять на себя, а ковщу придают противоположное вращение с меньщей скоростью. Планировочный цикл завершается в тот момент, когда рукоять достигает предельного положения. Одновременно с движениями рукояти и ковша происходит движение стрелы за счет изменения положения следящего золотника, на который воздействует следящая система.
Такое конструктивное выполнение гидропривода управления экскаваторным оборудованием значительно повышает точность управлением положения ковша.
Формула изобретения
1. Гидропривод управления экскаваторным оборудованием, содержащий гидроцилиндры стрелы, рукояти и ковша, соединенные напорными и сливными магистралями с распределительным блоком, гидроцилиндры-датчики положения стрелы, рукояти и ковша, связанные через гидроприемный блок с задатчиком глубины копания, отличающийся тем, что, с целью повышения точности управления положением ковша, он снабжен гидроцилиндром-датчиком положения платформы экскаватора.
связанным с магистралями гидроцилиндра датчика положения стрелы, причем задатчик глубины копания выполнен в виде следящего гидрораспределятеля, который связан с распределительным блоком.
2. Гидропривод по п. 1, отличающийся тем, что гидроприемный блок выполнен из нескольких гидроцилиндров-приемников, связанных с соответствующими гидроцилиндрами датчиками положения стрелы, рукояти и ковша, а следящий гидрораспределитель - из двух золотников, связанных механически со штоками гидроцилиндровприемников.
3. Гидропривод по п. 1,отличаюшийс я тем, что гидроприемный блок выполнен из одного гидроцилиндра-приемника, а следящий гидрораспределитель - в виде золотника, имеющего со штоком гидроцилиндра-приемника электрическую связь.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 321600, кл. Е 02F 9/20, 1971.
2. Авторское свидетельство СССР № 188385, кл. Е 02F 9/22, 1965.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления рабочим оборудованием экскаватора | 1978 |
|
SU885458A1 |
| Гидропривод рабочего оборудования одноковшового экскаватора | 1982 |
|
SU1134679A1 |
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| Способ копания одноковшовым экскаватором и устройство для его осуществления | 1976 |
|
SU749988A1 |
| Гидропривод одноковшового экскаватора | 1980 |
|
SU949092A1 |
| Устройство для управления ковшомэКСКАВАТОРА | 1978 |
|
SU804789A1 |
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
| Рабочее оборудование одноковшового экскаватора | 1979 |
|
SU777164A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1994 |
|
RU2085662C1 |
| Рабочее оборудование экскаватора | 1986 |
|
SU1435718A1 |