1
Иаобретение относится к кузнечно- прессовому-машиностроению в частности к конструкции кривошипных прессов автоматов.
Цель изобрете1шя - повьшюние производительности.
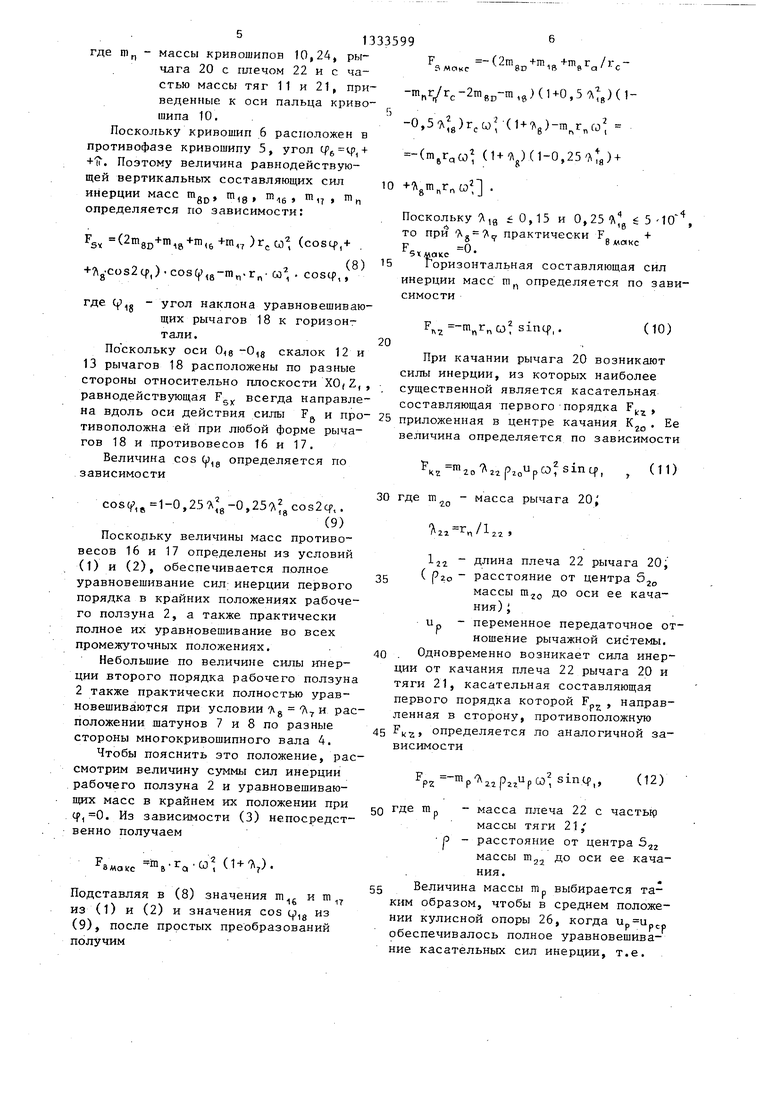
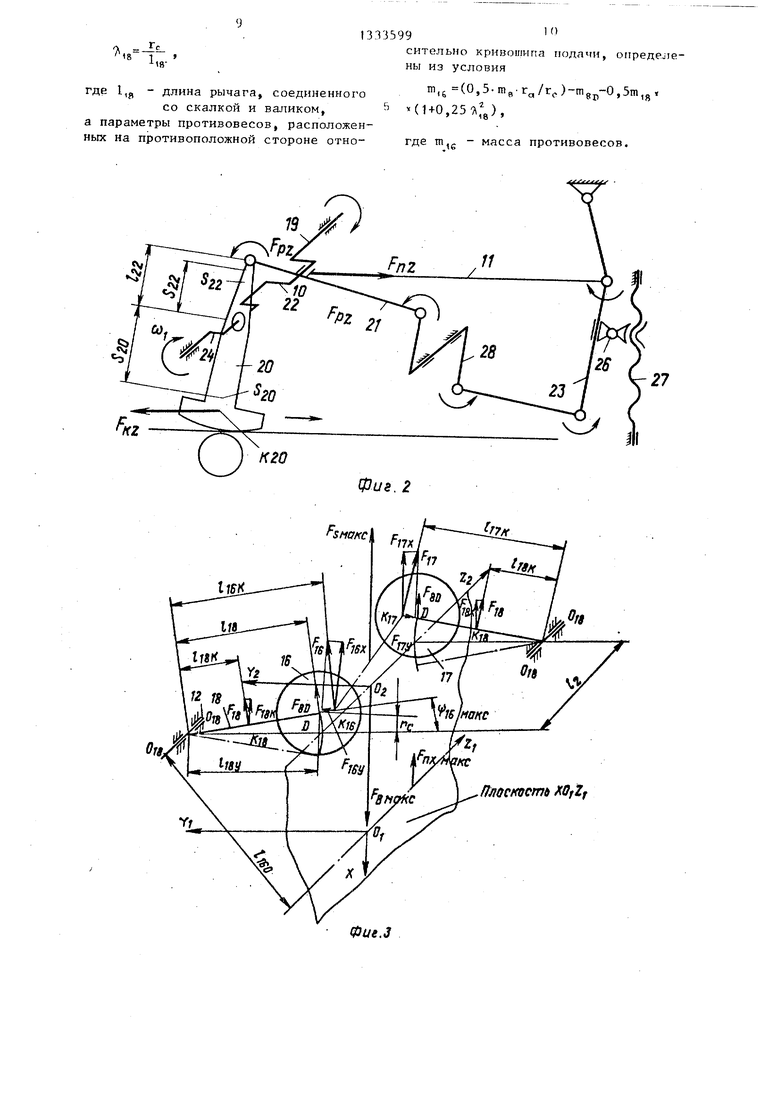
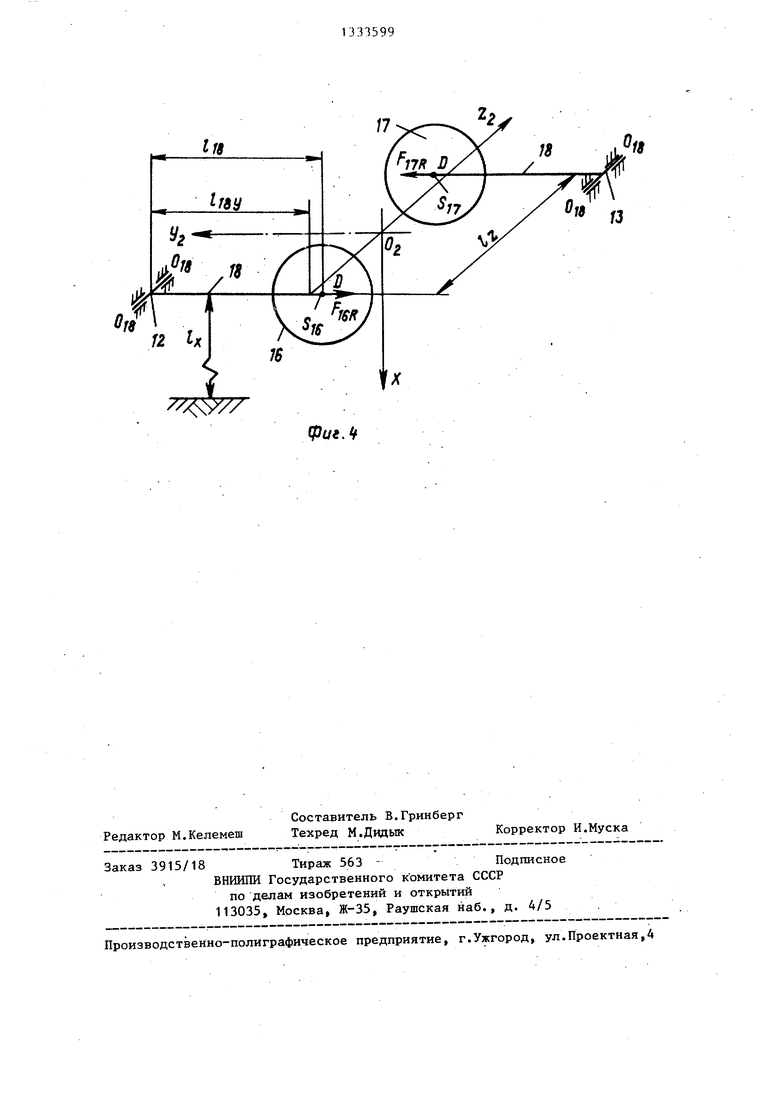
На фиг,1 изображены кривошипный пресс-автомат при рабочем ползуне, расположенном в крайнем нижнем положении, и двуплечем рычаге валковой подачи, расположенном в среднем положении, а также схема действия сил инерции на фиг.2 - привод валковой подачи при крайнем левом положении двуплечего .рычага; на фиг.З - уравно вешивайщие массы с противовесами в верхнем положении, а также схема дей ствия сил инерции-, на фиг.4 - уравновешивающие массы с противовесами в среднем положении.
Автомат содержит размещенный в направляющих 1 станины рабочий ползун -2, уравновешивающие массы, установленный в опорах 3 станины многокривошипный вал 4, связанный своими кривошипами 5 и 6 и шатунами 7 и 8 с рабочим ползуном 2 и уравновешивающими массами и посредством многоступенчатой зубчатой передачи 9 - с приводом валковой подачи, выполненным в виде сочлененного с соответствующим шарниром станины кривошипа 10, коромысла с грузом и шарнирно сочлененной с кривошипом 10 тяги 11.
Уравновешивающие массы выполнены в виде смонтированных параллельно друг другу и опорами 3 многокривр- шипного вала 4 скалок 12 и 13 и валиков 14 и 15 с противовесами 16 и 17, а также шарНирно сочлененных со ск алками 12 и 13 и валиками 14 и 15 рычагов 18. Валики 14 и 15 шарнирно сочленены с шатунами 8 многокривошипного вала 4, а скалки 12 и 13 размещены по разные стороны от многокривошипного вала 4 на равном расстоянии от плоскости, проходящей через опоры 3 многокривошипного вала 4, параллельно направляющим 1 рабочего ползуна 2. Шарнир сочленения кривошипа 10 валковой подачи со станиной выполнен в виде коленчатого вала 19. Коромысло выполнено в виде шарнирно сочлененного средней частью с эксцентриковым валом 19 двуплечего рычага 20, а также рычажного многозвенник.а, элемент которого - тяга 21 сочленен с плечом 22 двуплечего рычага 20, а
33599
элемент - рычаг 23 сочленен с тягой 11, при этом кривошип 10 и кривошип 24 эксцентрикового вала 19, связанно- f- го с двуплечим рычагом 20, смонтированы параллельно друг другу. Противовесы 16 и 17 смонтированы на валиках 14 и 15 с возможностью вращения.
Кривошипы 6 расположены в противо10 фазе (под углом 180) относительно кривошипов 5. На многокривошипном валу 4 закреплен элемент 25 привода пресса (не показан).
Общее передаточное отношение мно
15 гоступенчатой зубчатой передачи 9 равно единице, т.е. . Рычаг 23 имеет кулисную опору 26 и винт 27 для перемещения последней относительно рычага 23, который соединен с тягой
20 21 через кривошип 28,
Кривошип 10 при нижнем положении рабочего ползуна 2 расположен в верхнем положении (фиг,1), а при крайнем левом положении рычага 20 - в
25 крайнем правом .положении (фиг,2), Кривошип 24 направлен в сторону кривошипа 10,
Параметры противовесов 17, расположенных со стороны кривошипа 10 по30 дачи,определены из условия
т,
(0,5-m.r /rJ-m,. -0,5 га,й) .(UO,25 A )
(1)
40
45
35 где m ,.j масса противовесов 17
m ц - масса рабочего ползуна 2 с приведенной массой шатунов 8; г„ - радиус кривошипа 5 рабочего ползуна 2;
. г - радиус кривошипа 6 уравновешиваю1цих шатунов 8; т - неуравновешенные массы подачи, приведенные к оси шарнира соединения кривошипа 10 с тягой 11, г„ - радиус кривошипа 10; m|g - масса рычага 18-, 111,а приведенная масса рычага
о 1/
0 18J
-Л - - & 1 -LIS
g где l,g - длина рычага 18,соединенного со скалкой и валиком.
Параметры противовесов 16, расположенных на противоположной .стороне
113
относительно кривошипа 10, определены из условия
m
i&
(0,5.m )-m -0,5 m,gX
8D
(1+0,25,),
(2)
где m,g - масса противовеса 16.
Пресс-автомат работает следующим образом.
Вращение от привода автомата передается на элемент 25, далее на многокривошипный вал 4 и через многоступенчатую зубчатую передачу 9 на эксцентриковый вал 19, который вращается с той же угловой скоростью ьо,, что и многркривошипньш вал 4. Пр этом возникают центробежные силы инерции от неуравновешенных масс кривошипов 5 и 6 и частей массы, связанных с кривошипами 5 и 6 шатунов 7 и 8. Уравновешивание этих сил инерции производится с помощью противовесов (не показаны), установленных на многокривошипном валу 4. В случае расположения шатунов 7 и 8 по одну сторону многокривошипного вала 4 момен- ты от сил инерции шатунов 7 и 8 урав- новешиБа)отся за счет перераспределения масс шатунов 8.
Шатуны 7 преобразуют вращательное движение многокривошипного вала 4 в возвратно-поступательное перемещение рабочего ползуна 2. При этом возникает сила инерции F, направленная вдоль оси О, X перемещения рабочего ползуна 4, величина которой определяется по зависимости
.(o (cosq, + A,-cos2cp,), (3)
Ц)
угол поворота кривошипа 5, отсчитываемый от положения, соответствующего нижнему крайнему положению рабочего ползуна 2;
17
где 1 - длина шатуна 7.
Шатуны 8 преобразуют вращательное движение многокривошипного вала 4 в качательное перемещение рычагов 18 с переменной, угловой скоростью и ускорением ,g , вызывающих появление сил инерции. Их нормальные составляющие и F,, (фиг.4) определяются по зависимости
3..i99
К F
(6R (7 R
- 0,5,.ra -rJ1- -cos2cf,) a) J .(4)
Касательные составляющие этих сил инерции приложены в центрах качания D, K,g , К,, К,ц соответствующих масс. Их величины определяются по зависи- мостям (учтено условие, что центры
масс противовесов 16 и 17 расположены в точках D):
IBD
F,g m,g ,g -0,51,8,
(6 18 (s 20 F,, m, ,g -1,3 .
(5)
25
Величина ,g определяется no зависимости
18 A,e(cOSCf + AgCOs2Cf)-W , (6)
5
0
где cpg - угол поворота кривошипа 6, отсчитываемый от положения, соответствующего верхнему 0 крайнему положению рабочего ползуна 2,
г,./1е,.
,где Ig - длина шатуна 8.
Тяга 11 преобразует вращательное движение эксцентрикового вала 19 в качательное движение рычага 23 и кривошипа 28, которое через тягу 21 передается рычагу 20. Кривошип 24 обеспе„ чивает отход рычага 20 от прижимного ролика 29 при обратном ходе подачи (фиг.1) и их взаимный прижим при пря-- мом ходе (фиг.2).
При вращении эксцентрикового вала 19 возникают центробежные силы инерции от неуравновешенных масс кривошипов 10 и 24, рычага 20 с плечом 22 и части массы.тяги 11 и 21. Поскольку кривошип 10 подачи при нижнем положении рабочего ползуна 2 расположен в верхнем положении, а кривошип 24 параллелен ему и направлен в его сторону, вертикальная составляющая этих сил инерции F(, во всех положениях кривошипов оказывается направленной в сторону,
Ь
противоположную силе F,
,,
(7)
13
где m, - массы кривошипов 10,24, рычага 20 с гшечом 22 и с частью массы тяг 11 и 21, приведенные к оси пальца кривошипа 10.
Поскольку кривошип 6 расположен в противофазе кривошипу 5, угол + + и . Поэтому величина равнодействующей вертикальных составляющих сил инерции масс nigp, в определяется по зависимости:
I 16 17
m,
PS. .7 ) (COS4,+ .
/Q )
.cos2cf,)-cos(f),a-m.r.co, . cos(f,, где Vig
TO при практически F
5хмакс
макс
15 Горизонтальная составляюш;ая сил инерции масс ш определяется по з
симости
sincp,.
20
При качании рычага 20 возникаю силы инерции, из которых наиболее
- угол наклона уравновешивающих рычагов 18 к горизонтали.
Поскольку оси Oi8 -0,g скалок 12 и 13 рычагов 18 расположены по разные
стороны относительно плоскости ХО,Z,, существенной является касательная равнодействующая Fg всегда направле- составляющая первого-порядка F на вдоль оси действия силы F и про- 25 приложенная в центре качания К тивоположна ей при любой форме рычагов 18 и противовесов 16 и 17.
Величина cos ( определяется по зависимости
(10
составляющая первого-порядка .
го- величина определяется по зависимо
2 ™2o Zipzo pWf ,
coscf , 1-0,,25 cos2cf,.
(9)
nocKOjibKy величины масс противовесов 16 и 17 определены из условий (1) и (2), обеспечивается полное уравновешивание сил инерции первого порядка в крайних положениях рабочего ползуна 2, а также практически полное их уравновешивание во всех промежуточных положениях.
Небольшие по величине силы инерции второго порядка рабочего ползуна 2 также практически полностью уравновешиваются при условии-Ag Л и расположении шатунов 7 и 8 по разные стороны многокривошипного вала 4.
Чтобы пояснить это положение, рассмотрим величину суммы сил инерции рабочего ползуна 2 и уравновешивающих масс в крайнем их положении при tf,0. Из зависимости (3) непосредственно получаем
л макс
w d+V
16 и ™1Т
Подставляя в (8) значения m
из (1) и (2) и значения cos с,8 из
(9), после простых преобразований
получим
F -(2т- -ьт +m.,r
5 МОКС 8D 1В ее
/г, -2mer,-ra ,9) ( НО, 5 -Л,) (1- -0,)r,w() ifqW (1+V 1 ° 25 A e) +
m
10 ,,
n«.
Поскольку ,g f 0,15 и 0, ё 510,
TO при практически F
5хмакс
макс
Горизонтальная составляюш;ая сил инерции масс ш определяется по зависимости
sincp,.
(10)
При качании рычага 20 возникают силы инерции, из которых наиболее
существенной является касательная составляющая первого-порядка F приложенная в центре качания К
существенной является касательная составляющая первого-порядка F приложенная в центре качания К
составляющая первого-порядка .
го- Ее величина определяется по зависимости
2 ™2o Zipzo pWf ,
30 где - масса рычага 20
(11)
Azi П / 1x2
Iji - длина плеча 22 рычага 20i 35 Рго расстояние от центра массы до оси ее качания) ,
Up - переменное передаточное отношение рычажной системы. 40 Одновременно возникает сила инерции от качания плеча 22 рычага 20 и тяги 21, касательная составляющая первого порядка которой F , направленная в сторону, противоположную 45 kz определяется по аналогичной зависимости
.cp,,
(12)
5Q где т. - масса плеча 22 с часты
массы тяги 21, Р - расстояние от центра
массы т,,2 до оси ее качания.
55 Величина массы т. выбирается таким образом, чтобы в среднем положении кулисной опоры 26, когда обеспечивалось полное уравновешивание касательных сил инерции, т.е.
. (13)
Благодаря тому, что кривошип 10 j- подачи при крайнем левом положении, рычага 20 расположен в крайнем правом положении, а кривошип 24 парал- i лелей ему и направлен в его сторону, полное уравновешивание обеспечивает- ю ся при всех углах ср, . При регулировке положения кулисной опоры 26 величина Up меняется, при этом величины Fp и FUJ меняются пропорционально, а величина F,, остается без измене- 15 ния, вследствие чего возникает небольшая неуравновешенная сила инерции. При необходимости она легко компенсируется за счет сменных грузов, прикрепляемых соответственно к пле- 20 чу 22 или рычагу 20. Суммарная масса противовесов уменьшается на величину 2т(, по сравнению с массой противовесов в известных прессах.
Технико-экономический эффект от 25 внедрения изобретения обеспечивается за счет повышения производительности по сравнению с базовым объектом благодаря большей степени уравновешенности.
Формула изобретения
шипного вала, а скалки размещены по разные стороны от последнего на равном расстоянии от плоскости, проходя- ш;ей через опоры многокривошипного вала, параллельно направляющим ползуна.
2t Пресс-автомат по п.1, отличающийся тем, что шарнир сочленения кривошипа подачи со станиной выполнен в виде эксцентрикового вала.
3. Пресс-автомат по пп.1 и 2, отличающийся тем, что коро- 1 мысло выполнено в виде шарнирно сочлененного средней частью с эксцентриковым валом двуплечего рычага, а также рычажного многозвенника, один из элементов которого сочленен с одним из плеч двуплечего рычага, а другой - с тягой, при этом кривошип подачи и кривошип эксцентрикового вала, связанный с двуплечим рычагом, смонтированы параллельно друг другу.
4.Пресс-автомат по п.1, отличающийся тем, что противове30 сы смонтированы на валиках с возможностью вращения.
5.Пресс-автомат по п.1, о т л и- чающийся тем, что параметры
1. Вертикальный кривошипный пресс- противовесов, расположенных со сторо- автомат, содержащий размещенный в на- (. ны кривошипа подачи, определены из
правляющих станины рабочий ползун, уравновешиваюш1ие массы, установленный в опорах станины многокривошип- ньй вал, связанный соответствуюш ми шатунами с рабочим ползуном и уравновешивающими массами и посредством многоступенчатой зубчатой передачи с приводом валковой подачи, выполненным в виде сочлененного с соответствующим шарниром станины кривошипа, коромысла с грузом и шарнирно сочлененной с кривошипом тяги, причем в нижнем положении рабочего ползуна кривошип подачи размещен парллельно кривошипам рабочего ползуна, а коромысло при этом размещено вертикально, отличающийся тем, что, с целью повышения производительности, уравновешивающие массы вьшолнены в виде смонтированных параллельно друг другу и опорам многокривошипного вала скалок и валиков с противовесами, а также шарнирно сочлененных со скалками и валиками рычагов, при
условия
ш (0,5mg..,- 40 -0,5(m,g)(1+0,),
где m,
1П„
45
50
г го.
55
m
8D
m
18
масса противовесов; масса рабочего ползуна с приведенной массой шатунов соединения ползуна с много-. кривошипньм валом; радиус кривошипа рабочего ползуна;
радиус кривошипа уравновешивающего шатуна; неуравновешенные массы подачи, приведенные к оси шарнира соединения кривошипа подачи с тягой; радиус кривошипа подачиj приведенная масса уравновешивающего шатуна; масса рычага, соединенного со скалкой и вгшиком;
)
1333599«
ЭТОМ валики шарнирно сочленены с соответствующими шатунами многокривошипного вала, а скалки размещены по разные стороны от последнего на равном расстоянии от плоскости, проходя- ш;ей через опоры многокривошипного вала, параллельно направляющим ползуна.
2t Пресс-автомат по п.1, отличающийся тем, что шарнир сочленения кривошипа подачи со станиной выполнен в виде эксцентрикового вала.
3. Пресс-автомат по пп.1 и 2, отличающийся тем, что коро- 1 мысло выполнено в виде шарнирно сочлененного средней частью с эксцентриковым валом двуплечего рычага, а также рычажного многозвенника, один из элементов которого сочленен с одним из плеч двуплечего рычага, а другой - с тягой, при этом кривошип подачи и кривошип эксцентрикового вала, связанный с двуплечим рычагом, смонтированы параллельно друг другу.
условия
ш (0,5mg..,- 40 -0,5(m,g)(1+0,),
где m,
1П„
5
0
г го.
5
m
8D
m
18
масса противовесов; масса рабочего ползуна с приведенной массой шатунов соединения ползуна с много-. кривошипньм валом; радиус кривошипа рабочего ползуна;
радиус кривошипа уравновешивающего шатуна; неуравновешенные массы подачи, приведенные к оси шарнира соединения кривошипа подачи с тягой; радиус кривошипа подачиj приведенная масса уравновешивающего шатуна; масса рычага, соединенного со скалкой и вгшиком;
.1333599
TCсительно кривошипа подачи, оиределе 8 1,д. ны из условия
т., (0,5-т.-г /г. )-т„ -0,5т,,.« где l,j, - длина рычага, соединенного
со скалкой и валиком, (Н0,25 ) , а параметры противовесов, расположенных на противоположной стороне отно- где т, - масса противовесов.
Л
/rz
, 2
7/r
ffaffcffocmd 0fZf
Фие.З
1Г8
Фиг.
Редактор М.Келемеш
Составитель В.Гринберг Техред М.Дидык
Заказ 3915/18 Тираж 563 -Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно
.-полиграфическое предприятие, г.Ужгород, ул.Проектная,А
Корректор И.Муска

| название | год | авторы | номер документа |
|---|---|---|---|
| Пресс-автомат для обработки длинномерного материала | 1987 |
|
SU1442298A1 |
| Вертикальный кривошипный пресс-автомат | 1984 |
|
SU1180275A1 |
| Вертикальный кривошипный пресс-автомат | 1988 |
|
SU1523398A1 |
| Высадочный автомат | 1989 |
|
SU1701417A1 |
| Высадочный автомат | 1989 |
|
SU1768346A1 |
| Пресс-автомат | 1985 |
|
SU1263546A1 |
| Привод стана холодной прокатки труб | 1987 |
|
SU1533789A1 |
| Привод перемещения клети стана холодной прокатки труб | 1985 |
|
SU1273200A1 |
| Привод клети стана холодной прокатки труб | 1983 |
|
SU1159667A1 |
| Автомат для изготовления волнистых пружинных шайб | 1977 |
|
SU657896A1 |
Изобретение относится к кузнечно-прессовому машиностроению, в частности к конструкции кривошипных прессов-автоматов. Цель изобретения - повышение производительности. Это достигается за счет большей уравновешенности соответствующих масс. Последние содержат многокривошипный вал 4, рабочий ползун 2, шатуны 7, а также элементы валковой подачи: коленчатый вал 19, двуплечий рычаг 20, многоступенчатую зубчатую передачу 9. Уравновешивание обеспечивается за счет подбора соответствующих параметров противовесов. 4 з.п. ф-лы. 4 ил. (Л FiSiF,.,, f3 со оо со ел со со
| Вертикальный кривошипный пресс-автомат | 1984 |
|
SU1180275A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
