Изобретение относится к обработке металлов давлением и может быть использова- но при конструировании высадочных автоматов.
Цель изобретения - повышение производительности автомата за счет увеличения степени его уравновешенности
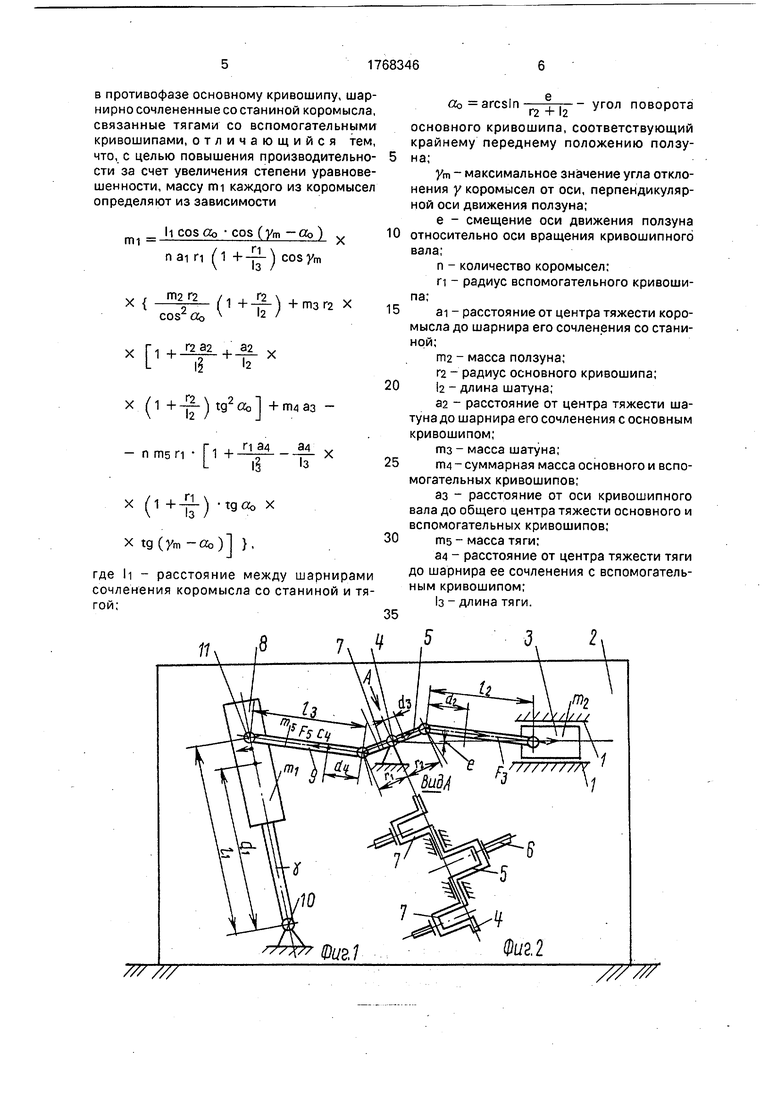
На фиг.1 представлена структурная схема автомата; на фиг.2 - вид А на фиг.1.
Автомат содержит размещенный в направляющих 1 станины 2 ползун 3, многокривошипный вал 4 с основным кривошипом 5, связанным посредством шатуна 6 с ползуном 3, и несколькими вспомо- гательнымикривошипами7,
смонтированными в противофазе основному кривошипу 5, шарнирно сочлененные со станиной 2 коромысла 8, связанные тягами 9 с вспомогательными кривошипами 7. Масса каждого из коромысел определена по зависимости
гти
И COS Оо COS (ym - Оо ) v
Л
nai п (1 +-р) cos/m
х {
ГЛ2 Г2 COS2 Go
(1+f)
+ тз Г2 X
X
x
2 х (1 + -р-) tg2 Oo 1 + пи аз СЛ
С
- n ms ri
1 +
П 34
Э4
з
X
х (1 +-§-) -tgob х х tg(ym -Oo)J },
(1)
где mi - масса коромысла 8:
И - расстояние между шарнирами 10 и 11 сочленения коромысла 8 со станиной 2 и тягой 9;
Оо arcsin ---.угол поворота основного кривошипа 5, соответствующий крайнему переднему положению ползуна 3,
N 2;
,оо
со
о
е - смещение оси х движения ползуна 3 относительно оси вращения кривошипного вала 4;
П - радиус вспомогательного кривошипа 7;
ai - расстояние от центра тяжести Ci коромысла 8 до шарнира 10 его сочленения со станиной 2;
ПГ12 - масса гтгЩзуЯа 3; I
Г2- раДйус $с°но йно.го кривошипа 5;
12 длина шатуна 61 i .
тз - масса шатуна 6; «
32 - расстояние or центра тяжести С2 шатуна 6 до шарнира 12 его сочленения с основным кривошипом 5;
ГЛ4 - суммарная масса основного 5 и вспомогательных кривошипов 7;
аз - расстояние от оси кривошипного вала 4 до общего центра тяжести Сз основного 5 и вспомогательных кривошипов 7;
п - число коромысел;
ins - масса тяги 9;
34 - расстояние от центра тяжести СА тяги 9 до шэрнира 13 ее сочленения с вспомогательным кривошипом 7;
з - длина тяги 9.
Зависимость (1) для определения массы ггм каждого из коромысел получена из условия равенства в проекциях на ось X движения ползуна сил инерции, развиваемых, с одной стороны, ползуном 3, шатуном 6, кривошипом 5, а с другой коромыслами 8, тягами 9, вспомогательными кривошипами 7, При этом, рассматривается положение всех указанных подвижных звеньев, соответствующее крайнему переднему положению ползуна 3, когда коромысла 8 находятся в крайнем левом положении, а составляющие по оси X сил инерции, развиваемых этими звеньями, максимальны по своей величине.
Это условие записывается в виде
Fi cosym + J Fix 0 i 2
(2)
где ym максимальное значение угла отклонения коромысел 8 от оси, перпендикулярной оси X движения ползуна 3, имеющее место в момент, когда ползун 3 находится в крайнем переднем положении;
Fi n mi a
П
ai
/1 V+ з )
- ве11 COS ( ym - Оо )
личина суммарной силы инерции, развиваемой коромыслами 8;
. та о Г2 / „ , Г2
(1+тг) -величина
проекции на ось X силы инерции,развиваемой ползуном 3;
10 х (1 +-р) -tg2033 | -cos «о -величина
проекции на ось X силы инерции,развиваемой шатуном 6;
15F4x тз о аз cos OQ - величина проекции на ось X суммарной силы инерции, развиваемой основным 4 и вспомогательными кривошипами 7;
34 П
FSX - nms о и Г1 + - L1§
34 13
X
X ( 1 + -рЛ tg Оо tg ( у,п - «о ) 1 COS Оо
величина проекции на ось X суммарной силы инерции, развиваемой тягами 9;
(о- угловая скорость кривошипного вала 4.
Подстановка приведенных значений Fi, Fix (i 1-5) в (2) и разрешение относительно mi, дают формулу (1) для ее определения.
Автомат работает следующим обраЗОМПри вращении кривошипного вала 4 основной кривошип 5 посредством шэтуна 6 сообщает возвратно-поступательное движение ползуну 3, при рабочем ходе которого
совершается технологическая операция высадки. Одновременно вспомогательные кривошипы 7 посредством тяг 9 сообщают качательные движения коромыслам 8 в сторону противоположную перемещению ползуна 3, осуществляя уравновешивание подвижных частей автомата.
Применение предлагаемой методики расчета масс коромысел позволяет повысить степень уравновешенности автоматэ и
тем самым дает возможность увеличить производительность автомата.
Формула изобретения
Высадочный автомат, содержащий размещенный в направляющих станины ползун, многокривошипный вал с основным кривошипом, связанным посредством шатуна с ползуном и несколькими вспомогательными кривошипами, смонтированными
в противофазе основному кривошипу, шар- нирно сочлененные со станиной коромысла, связанные тягами со вспомогательными кривошипами, отличающийся тем, что, с целью повышения производительно- сти за счет увеличения степени уравновешенности, массу mi каждого из коромысел определяют из зависимости
И COSOo COS (Xm -Op) v fflli-Jf-
n ai п (1 +-p) cosym
{
ГП2 Г2 COS2 Oo
O+TT)
+ тз Г2 X
X
Г1+Л|2 +а2 х
x (1 + -p) tg20o + гп4аз П 1715 П
1 +
П Э4
34 13
X
x (1 + -p-) tg Oo x x tg (ym ) },
где И - расстояние между шарнирами сочленения коромысла со станиной и тягой;
0
5
0
5
0
5
Oo arcsln-;r-jугол поворота
основного кривошипа, соответствующий крайнему переднему положению ползуна;
Ут - максимальное значение угла отклонения у коромысел от оси, перпендикулярной оси движения ползуна;
е - смещение оси движения ползуна относительно оси вращения кривошипного вала;
n - количество коромысел:
п - радиус вспомогательного кривошипа;
ai - расстояние от центра тяжести коромысла до шарнира его сочленения со станиной;
гп2 - масса ползуна;
Г2 - радиус основного кривошипа;
2 длина шатуна;
32- расстояние от центра тяжести шатуна до шарнира его сочленения с основным кривошипом;
тз - масса шатуна;
гп4 - суммарная масса основного и вспомогательных кривошипов;
33- расстояние от оси кривошипного вала до общего центра тяжести основного и вспомогательных кривошипов;
ms- масса тяги;
34- расстояние от центра тяжести тяги до шарнира ее сочленения с вспомогательным кривошипом;
з - длина тяги.
| название | год | авторы | номер документа |
|---|---|---|---|
| Высадочный автомат | 1989 |
|
SU1701417A1 |
| Вертикальный кривошипный пресс-автомат | 1984 |
|
SU1180275A1 |
| Вертикальный кривошипный пресс-автомат | 1986 |
|
SU1333599A1 |
| Вертикальный кривошипный пресс-автомат | 1988 |
|
SU1523398A1 |
| Пресс-автомат для обработки длинномерного материала | 1987 |
|
SU1442298A1 |
| Радиально-обжимная машина | 1982 |
|
SU1118469A1 |
| Пресс-автомат | 1985 |
|
SU1263546A1 |
| Устройство для уравновешивания ползуна кривошипного пресса | 1979 |
|
SU854743A1 |
| Высечные ножницы | 1987 |
|
SU1530343A1 |
| Дезаксиальный кривошипно-ползунный механизм | 1989 |
|
SU1747775A1 |
Использование: при конструировании высадочных автоматов. Сущность изобретения: высадочный автомат содержит шар- нирно сочлененные со станиной коромысла. Масса коромысел определяется по аналитической зависимости, обеспечивающей увеличение степени уравновешенности автомата. 2 ил.
77Г777
/// /
| Высадочный автомат | 1989 |
|
SU1701417A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
