Фиг 7
Изобретение относится к машиностроению, о частноеги к механическим передачам, содержащим винтовые механизмы, и может быть использовано для сообщения исполнительному opiany поступательного движения,
Известен р;-.г :osoi i пр июд поступательного прпомйщениг каретки, в котором гайк.а соединена с короткой посредством поводка, ,1X0 С - -лкпип.) о последней.
Известно r; v:;;;c: угтрсйстпо. содержащее .нг09уг пэру -итпрс мекцу гайкой и корпусом р.. -о)1 ем , гола качения, размещенные с оЬо . х icfiuof- гайки.
Hsi-ioo - 5 т из к им : мл-боглению явпя- егся устройство .-i передачи дгшжен я исполнительному oDrf. Hv, содержащее корпус, установленные - HL/ в/m и взаимодействующую с ним гайку с опорной плоскостью, кронштейн, -5сTiiц .вязанный с неполны- тельным opianoM, тела качения, размещенные меж д у - р с i и. т е и н с м я опорно и поверхностью i. r i;- i средство фиксации гайки от проыоротз и по крайней мере одну пружину, связывающую кронштейн с гай- кой.
Однако в швесгно ч устройстве конструкция средства Фиксации от прово- рогэ предполагает нал/чие значительных зазоров, приводящих .-, появлению люфта Б передаче при pono;:- . рометого хение злемонточ Ктнс;.мя известном устройстве ЬОЭМСХ-О ЛПи Ь 33 ПОеделаМИ ГЭЙКИ по ре длине .-п. с- едосгаткм снижа- ют точнос-ь перемещение исполнительного
О р ГЗ г:,,
Цс.г .i - ювышенио точности г ео МС:: .г ни ;;ь , ь ..ньи)ения люф- т.; при refcpro улучшении условий car-ioyc а - Снкч гэикч (;ситваы 0 винта.
На фиг. гсп:аjaho устройство поступд | Г; г| ь НО ГО -л Р 3 - 1 1Ц :Ч1.1Ч . :r rion mv: С:Л ЬНОГО
органа, о „. i.u.i i и вид: и :.; ( и г « з Д)Ц А н а Ф ч г. 1. Ус ист ci посту п о i у . ь 11 и го г е pefie ute- нмя испо/н- ife-u.iioro ор.ана содержит хор- г .ус 1, B.HI 2, с; т,з;;.,: взаимодействующую с ним гай. 3, ;кес.1 .о соединенную с корпуСОМ 1 И ИМ :Ю1.ЧУ Ю ОПГ.р|ЦуЮ ПЛОСКОСТЬ 3
Устрjiic bo енас.-жено фонштейном 4. жестко свчзанныг- с иеполнитель.ным орга- ном 5. 6 кй - -лния (|иарикм) размещены между крон чт- йном и опорной плоскостью 3 ГЗМК .
Vc 1 ройсгоо содррХчИ cp. iiC. BO Ф;-1кс::;ЦИИ r3fl.. 1 3 О npOROOOTVl -Ь. .
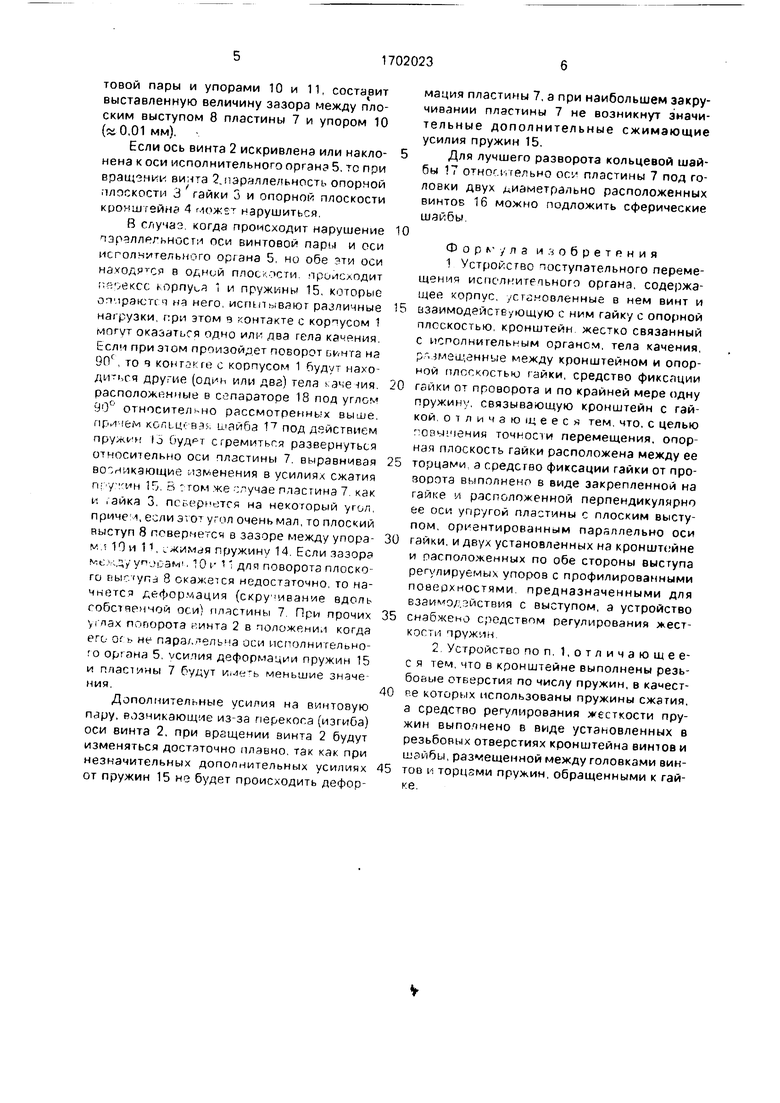
1иде :i.ti,o;Mi 4 .M f01 : ы гайке п распопо жвнний нерпвп/v /. i чfл-iо .: гзйк.ч 3 упругой пластин;,: г плоским .;иг. г-/пом В. opvjoi.v.ipoDaHH iM г-.,:;рал;:ельно осп гайки 3 л дву). установленных на кронштейне 9 и
расположенных по обе стороны выступа 8 регулируемых упоров 10 и 11 с профилированными (выпуклыми криволинейными) поверхностями, предназначенными для взаимодействия с выступом 8. Упоры 10 и 11 законтрены тайками 12 и 13 соответственно. Один из упомянутых упоров поджат к плоскому выступу 8 пружиной 14
Устройство снабжено также по крайней мере одной пружиной 15 сжатия, связывающей кронштейн -1 с гайксй 3, и средством регулирования жесткости указанных пружин, выполненным в виде установленных е резьбовых отверстиях кронштейна винтов 16 и копьцевой щэйбы 17, размещенной между головками винтов 15 и торцами пружин 15, обращенными к гайке 3.
Тела 6 качения заключены в сепазатор 18. охватывающий упругсе кольцо 19, ориентирующее сепаратор 18 с телами 6 качения концентрично оси гайки 3.
На кронштейне 4 жестко закреплена шлифованная закаленная пластина 2С,образующая опорную плоскость кронштейна 4 для взаимодействия с телами 6 качения гайки 3. Винты 16. пружины 15 и кольцевая шайба 17 отсположены кпнцйнтрично dew винтовой пары
Двумя винтами 16 через кольцевую шайбу 17 пружины 15 и корпус 1 создается оптимальное усилие поджатия тел 6 качения, устраняющее осевой люфт винтовой пары и обеспечивающее легкость ее с-эмо- устанавливания. Остальные винты 6 служат только) для фиксации положения пружин 15
Устройство поступательного перемещения испопни ильного органа работает следующим образом.
При возникно зении радиальных биений уинтосой пары происходит перемещение -ел 6 крчениг, с сепаратором 18 между опорной плоскостью 3 гайки 3 и опорной поверхностью кронштейна 4. При этом происходит сдвиг торцов пружин 15, а плоский выступ 8 скользит между выпуклыми криволинейными поверхностями упоров 10 и 11, оставаясь прижатым к упору 1 . Тем самым, посредством пластины 7 с плоским выступом 8 и упоров 10 и 11 гайка 3 удерживается от разворота относительно кронштейна 4, несущего исполнительный орган 5. Пружина 14 исключает люфт, возникающий вследствие разворота 1айки 3 относительно оси винтовой пары.
Если произойдет увеличение момента разворота гайки 2 относительно оси винтовой пары (например, за счет попадания грязи в винтовую пару) люфт от разворота на д/,ине, рлиной расстоянию между осью зинтовой пары и упорами 10 и 11, составит выставленную величину зазора между плоским выступом 8 пластины 7 и упором 10 (0,01 мм). Если ось винта 2 искривлена или накло- нена к оси исполнительного органа 5, тс при вращзнии винта 2.пэраллельность опорной плоскости 3 гайки 3 и опорной плоскости кронштейна 4 МОЖЕТ нарушиться.
В случаз, когда происходит нарушение чэрзллегьносги оси винтовой пары и оси исполнительного органа 5, но обе ти оси нахолятся в одной плоскости происходит 1 и пружины 15, которые оп лрэкгп ч на него, испытывают различные нагрузки, при этом в контакте с корпусом 1 могут оказаться одно или два гела качения. Если при этом произойдет поворот на 9ПГ, то ч контакте с корпусом 1 будут находился другие (один или два) тела s-эче-шя. расположенные в сепараторе 18 под углом 90° относительно рассмотренных выше, причем , шайба I7 под действием пружок 15 Оудрт стремиться развернуться относительно оси пластины 7. выравнивая возникающие изменения в усилиях сжатия 1Г}. В : том же пластина 7 как v, ,айка 3. повернется на некоторый угол, приче , если угол очень мал, то плоский выступ 8 повернется в зазоре между упора- м П и 11, . пружину 14. Если зззора ме-1 -ду yn-jcawi. 101- 1 длч поворота плоского йыггупа 8 окажется недостаточно, то начнется деформация (скручивание вдоль гобстчрнчой оси) пластины 7 При прочих Vi iax попорота кинта 2 в положении когда его Of ь не параллельна оси исполнительного органа 5, VCM/IHH деформации пружин 15 и пластины 7 будут име ь меньшие значения.
Дополнительные усилия на винтовую пару, возникающие из-за перекоса (изгиба) оси винта 2, при вращении винта 2 будут изменяться достаточно плавно, так как при незначительных дополнительных усилиях от пружин 15 не будет происходить деформация пластины 7, а при наибольшем закручивании пластины 7 не возникнут значительные дополнительные сжимающие усилия пружин 15.
Для лучшего разворота кольцевой шайбы 17 отном ,гельно оси пластины 7 под головки двух диаметрально расположенных винтов 16 можно подложить сферические шайбы.
Ф о р л1 / л а изобретения
1Устройство поступательного перемещения исполнительного органа, содержащее корпус, установленные в нем винт и взаимодействующую с ним гайку с опорной плоскостью, кронштейн жестко связанный с исполнительным органом, тела качения, Р смещенные между кронштейном и опорной плоскостью гайки, средство фиксации гайки от проворота и по крайней мере одну пружину, связывающую кронштейн с гайкой, отличающееся тем, что, с целью говънчения точности перемещения, опорная плоскость гайки расположена между ее торцами а средство фиксации гайки от про- зорота выполнено в виде закрепленной на гайке и расположенной перпендикулярно ее оси упругой пластины с плоским выступом, ориентированным параллельно оси гайки, и двух установленных на кронштейне и расположенных по обе стороны выступа регулируемых упоров с профилированными поверхностями предназначенными для взаимодэйствия с выступом, а устройство снабжено сродством регулирования жест- когти пружин
2Устройство поп. 1,отличающее- с я тем, что в кронштейне выполнены резь- боаые отверстия по числу пружин, в качест- р.е которых использованы пружины сжатия, а средство регулирования жесткости пружин выполнено в виде установленных в резьбовых отверстиях кронштейна винтов и шайбы, размещенной между головками вин- тоо и торцами пружин, обращенными к гайке.
вид А
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм настройки регулируемого контакта | 1979 |
|
SU881715A1 |
| Прибор для определения гибкости обуви | 1981 |
|
SU1000841A1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2004 |
|
RU2269093C1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |
| Установка для изготовления витого магнитопровода электрической машины | 1989 |
|
SU1695453A1 |
| Устройство для юстировки оптического элемента | 1990 |
|
SU1781660A1 |
| Трубогиб | 1985 |
|
SU1428486A1 |
| Механизм перемещения рабочего органа (его варианты) | 1983 |
|
SU1209970A1 |
| СЕЯЛКА | 1993 |
|
RU2057422C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ГРУНТОВ | 1993 |
|
RU2057231C1 |
Изобретение относится к машиностроению и может 5ьг использовано для сообщения поступотепьното движения 5 исполнительному органу. Цель изобретения - повышение точности перемещения. С этой целью средство фиксации гайки 3 от проворота выполнено в виде упругой пластины 7 с плоским выступом и регулируемых упоров Кроме того, устройство снабжено средством регулирования жесткости пружин 15, в качестве которых использованы пружины сжатия. При радиальных биениях винтовой пары тела качения 6 перемещаются, взаимодействуя с опорной плоскостью 3 гЈ,йки 3 и торцом кронштейна 4 В случае непараллельности оси винта 2 направлению перемещения исполнительного органа 5 возникающая при этом неравномерная нагрузка на пружины 15 уравновешивается по средством кольцевой шайбы 17 2 ил. О hO О hO CJ
га
Фаг. 2
