2. Механизм перемещения рабочего органа, содержащий ходовой щариковый винт и гайку с устройством предохранения от проворота, связываемую с рабочим органом через устройство компенсации перекосов и биений, отличающийся тем, что, с целью по- выщения нагрузочной способности кинематической точности и достижения компактности, устройство компенсации выполнено в виде вилки, охватывающей ходовой винт с
Изобретение относится к станкостроению, в частности к прецизионному станкостроению.
Цель изобретения - повышение нагрузочной способности и кинематической точности за счет обеспечения возможности беззазорной компенсации перекосов, биений и неточностей сборки, а также достижение компактности.
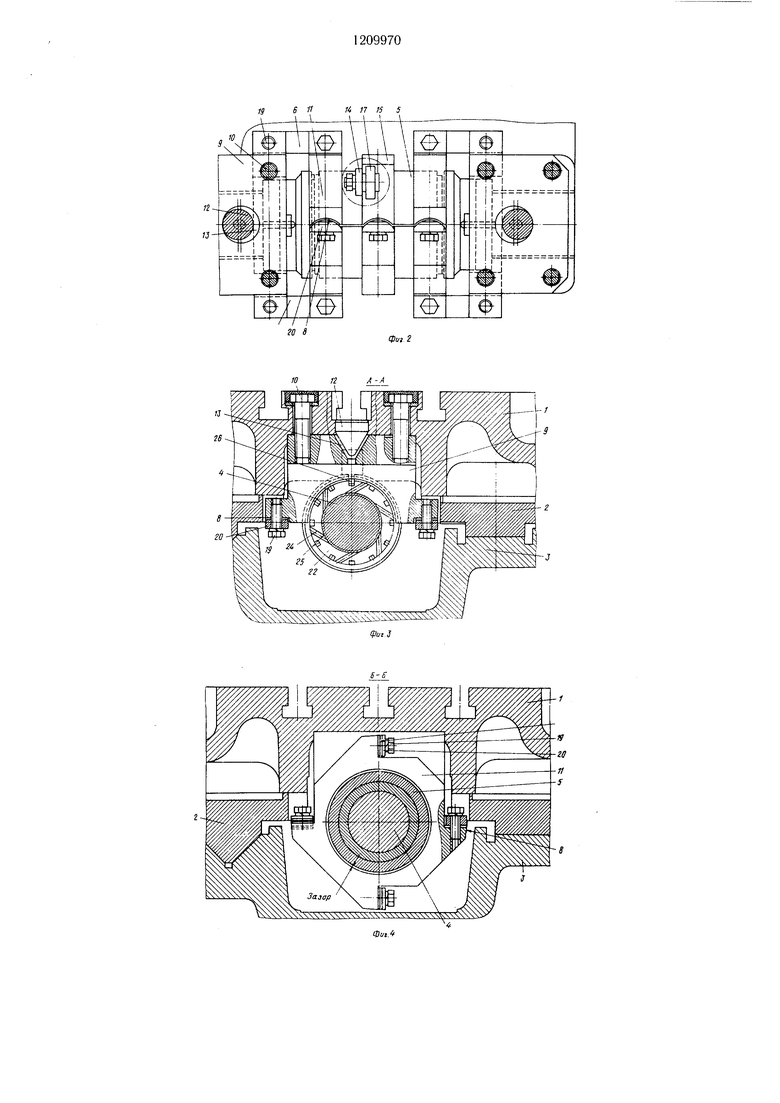
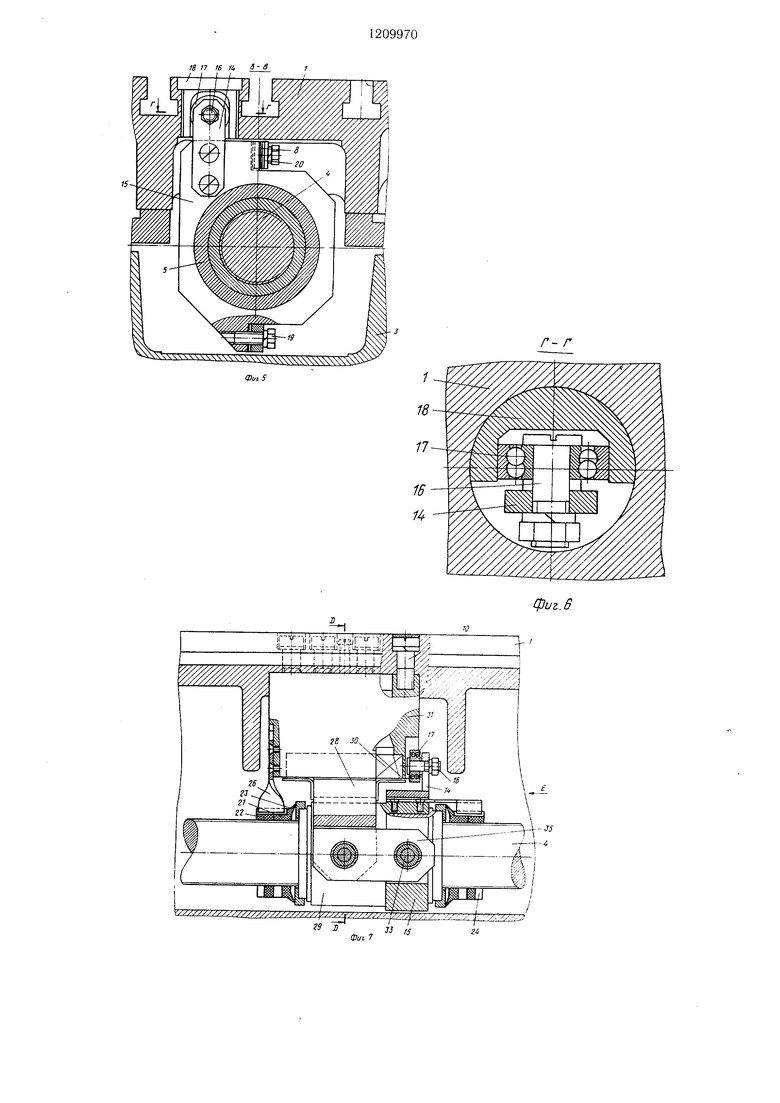
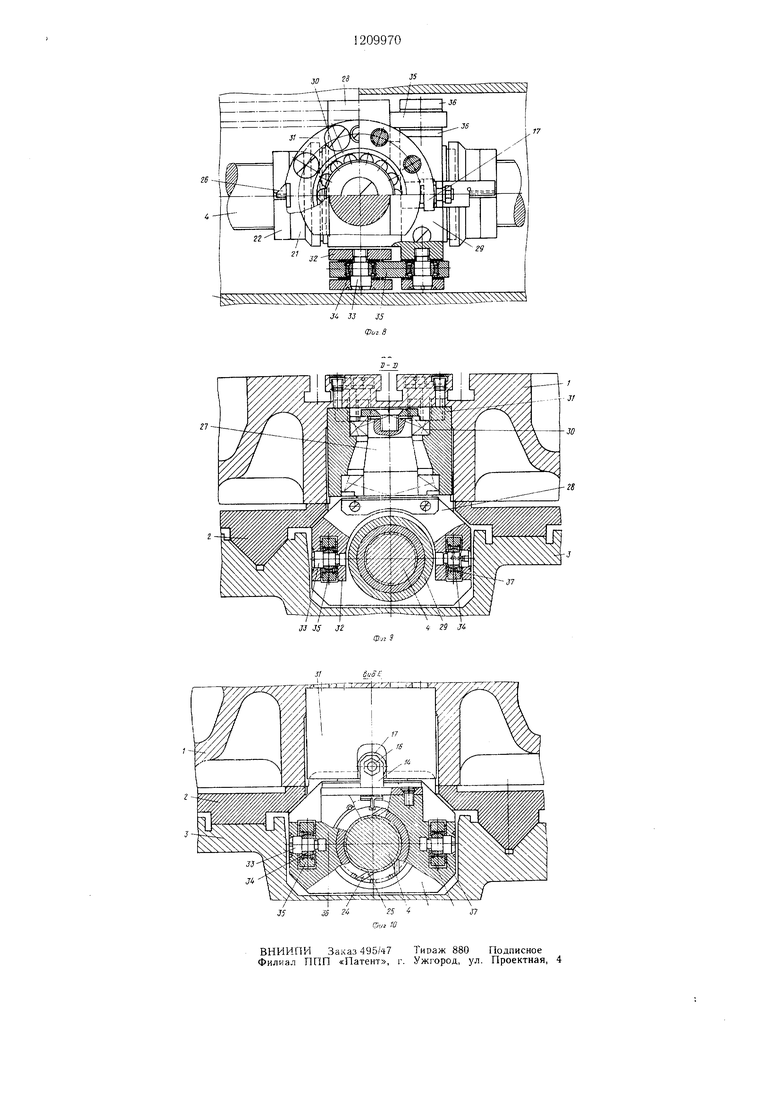
На фиг. 1 показан первый вариант механизма перемещения рабочего органа, продольный разрез; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5 - разрез В-В на фиг. 1; на фиг. 6 - разрез Г-Г на фиг. 5; на фиг. 7 - второй вариант механизма перемещения рабочего органа, продольный разрез; на фиг. 8 - то же, вид сверху; на фиг. 9 - разрез Д-Д на фиг. 7; на фиг. 10 - вид Е на фиг. 7;
Подвижный рабочий орган-стол 1 имеет возможность перемещения по направляющим 2 станины 3 станка.
Механизм перемещения рабочего органа содержит шариковый винт 4 и шариковую гайку 5.
По первому варианту конструкции механизма с каждой из торцовых сторон гайки 5 расположены две пары перпендикулярных друг другу продольно ориентированных упругих лент 6 и 7, связывающие своими полуцилиндрическими концами 8 кронштейны 9, которые с помощью винтов 10 закреплены на столе 1, с корпусом гайки 5 - через плавающие промежуточные кольца 11. Средство установочной регулировки пред- натяжения системы лент 6 содержит винт 12 с коническим концом, взаимодействующим с коническим углублением 13, выполненным в основании кронштейна 9 эксцентрично оси винта 12. Устройство предохранения гайки 5 от проворота содержит кронштейн 1,4, закрепленный на гребне 15 корпуса гайки 5. На консольной оси 16, параллельной оси ходового винта 4, установлен ролик 17, взаимогайкой и устанавливаемой в подшипниках качения с преднатягом на рабочем органе перпендикулярно оси ходового винта, на концах вилки выполнены проушины со сферическими шарнирами, на гайке - выступы с проушинами и сферическими шарнирами, связанными с шарнирами вилки тягами, толкателями, размещенными вдоль гайки по обе ее стороны, а длина тяг-толкателей меньше или равна длине гайки.
действующий с пазом дополнительного кронштейна 18, закрепленного на рабочем органе-столе 1. Полуцилиндрические концы 8 лент 6 закреплены винтами 19 с выпуклыми шайбами 20 соответственно к кронштейнам 9
и промежуточным кольцам 11. Пара лент 7, расположенная в вертикальной плоскости, соединяет промежуточные кольца II с гребнем 15 также с помощью винтов 19 с выпуклыми щайбами 20. По обоим торцам
гайки 5 на ходовом шариковом винте 4 установлены гайки-счишалки: внутренняя 21 и наружная 22. Внутренняя 21 оснащена воротником 23, имеющим тангенциальные прорези 24, формирующие счищающие кромки 25. Наружная гайка-счищалка 22 оснащена тангенциальными прорезями 24 и счищающими кромками 25. Гайки-счищалки 21 и 22 предохранены от проворота щпонкой 26, закрепленной на кронштейне 9.
П-о второму варианту конструкции механизма устройство компенсации перекосов и биений выполнено в виде оси 27 с,вилкой 28, охватывающей гайку 29 и взаимодействующей с ней. Ось 27 установлена на подшипниках с преднатягом 30 в стакане 31, закрепленном винтами к столу 1. В вилке 28 выполнены проушины 32, в которых на осях 33 в сферических подшипниках 34 установлены концы тяг-толкателей 35. Противоположные концы тяг-толкателей 35 присоединены к проушинам 36, выполненным в корпусе
гайки 29, с помощью осей 33 и сферических подшипников 34. Сферические подшипники 34 снабжены зашитными шайбами 37.
Меха-низм перемещения рабочего органа по первому варианту конструкции работает следующим образом.
При вращении винта 4 гайка 5 со своим корпусом и выполненным на нем гребнем 15 перемещается поступательно вдоль винта. При этом гайка 5 удерживается от проворота пазом закрепленного к столу 1 дополнительного кронштейна 18, на который опи
рается прикрепленный к гайке 5 самоуста- навливающийся ролик 17.
Поступательное перемещение гайки 5 передается столу 1 через систему лент 6 следующим образом (фиг. 1 и 2), от гребня 15 гайки 5 парой лент 7, расположенных в вертикальной диаметральной плоскости, на промежуточное кольцо 11 и, далее, от промежуточного кольца 11 через пару лент 6, расположенных в горизонтальной диаметральной плоскости, на кронштейны 9 стола 1.
Ввиду того, что ленты 6 или 7 могут работать только на растяжение, при перемещении гайки 5 со столом 1 влево работает правая от гребня 15 гайки 5 часть системы лент; при перемещении гайки 5 со столом 1 вправо - левая часть системы лент. При этом, так как ленты могут работать только на растяжение, для избежания люфтов и скачков при реверсе стола система лент 6 или 7 преднатягивается путем установочной осевой сдвижки в противоположные стороны кронштейнов 9 относительно стола 1 за счет ввинчивания винтов с коническими концами в конические углубления 13 кронштейнов 9, после чего кронштейны 9 окончательно закрепляются винтами.
При поступательном перемещении гайки 5 совместно со столом 1, ее биения и перекосы столу 1 не передаются, так как полностью компенсируются упругим поперечным изгибом взаимно перпендикулярных пар лент 6 или 7, биения и перекосы гайки 5 в горизонтальной ПЛОСКОСТИ компенсируются вертикальной парой лент 7, а биения и перекосы гайки в вертикальной плоскости - горизонтальной парой лент 6.
Все остальные разнонаправленные перекосы и биения гайки компенсируются совместной упругой поперечной податливостью двух взаимно перпендикулярных пар лент.
При поступательном перемещении гайки 5 ролик 17 устройства предохранения гайки от проворота компенсирует ее биения и перекосы за счет перекатывания по боковой стенке паза дополнительного кронштейна 18. При этом возможная непараллельность упомянутой стенки паза к оси 16 ролика 17 компенсируется самоустанавливающимся сферическим подшипником ролика 17.
Поперечная относительная подвижность при компенсации перекосов и биений гайки 5 и ролика 17 не передает на стол 1 практически никаких боковых усилий, поскольку поперечная податливость упругих лент весьма
5
велика, а ролик 17, смонтированный на подшипнике качения, перекатывается по пазу с пренебрежимо малым коэффициентом трения качения.
Механизм перемещения рабочего органа по второму варианту конструкции работает следующим образом.
Усилия для перемещения стола 1 в прямом и обратном направлениях передаются тягами-толкателями 35 от гайки 29 к вил0 ке 28.
Непараллельность (перекос) ходового винта 4 относительно направляющих 2 стола 1, а также равномерная раздача осевого усилия на обе тяги-толкатели 35 обеспечивается за счет возможности свободного поворота оси 27 с вилкой 28 вокруг вертикальной оси, перпендикулярной оси ходового винта 4. Непараллельность (перекос) ходового винта 4 относительно направляющих 2 стола 1 в вертикальной плоскости, а также все
0 вертикальные смещения и биен1 я гайки 29 компенсируются поворотом тяг-толкателей 35 вокруг горизонтальных осей их сферических шарниров.
Все смещения и биения гайки 29 в го5 ризонтальной плоскости компенсируются поворотом сферических шарниров тяг-толкателей 35 вокруг их вертикальных осей, параллельных оси качения вилки 28.
Наконец, возможный поворот тяг-толкателей 35 вокруг их продольной горизонталь0 ной оси, не являющийся необходимым для компенсации смещений, локализуется упругими защитными шайбами 37.
Отсутствие люфтов и зазоров в продольном направлении при перемещении и при реверсе стола обуславливается установочным преднатягом подшипников 30 качения на оси 27, а также заводским (построечным) преднатягом сферических шарнирных подшипников.
Устройство для предохранения гайки 29
0 от проворота, а также для защиты от загрязнений работает во втором варианте конструкции принципиально так же, как и в первом.
Исполнение по второму варианту конструкции при соосном винту 4 приложении
результирующего усилия обеспечивает существенное сокращение габарита механизма по длине, т.е. тяги-толкатели 35 симметрично размещаются по обе стороны гайки 29 и не превышают ее длину, т.е. и габарит механизма по длине не превышает длину гайки 29.
Фиг 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения суппорта токарного станка | 1978 |
|
SU740408A1 |
| Станок портального типа | 1982 |
|
SU1060418A1 |
| Механизм перемещения рабочего органа | 1988 |
|
SU1525374A1 |
| Самоустанавливающаяся ходовая гайка | 2023 |
|
RU2812157C1 |
| Подъемник для проведения монтажных работ | 1987 |
|
SU1534000A1 |
| УРАВНОВЕШЕННАЯ ШАРНИРНО-ПОВОДКОВАЯ МУФТА | 2001 |
|
RU2207267C2 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ НА ТРЕНИЕ И ИЗНАШИВАНИЕ СОПРЯЖЕНИЙ ТИПА ВАЛ - ВТУЛКА | 1999 |
|
RU2173846C2 |
| Устройство для соединения полотнищ из полимерных материалов | 1975 |
|
SU526515A1 |
| Привод перемещения стола плоскошлифовального станка для глубинного шлифования | 1983 |
|
SU1155433A1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
1. Механизм перемещения рабочего органа, содержащий ходовой шариковый винт и гайку с устройством предохранения от проворота, связываемую с рабочим органом через устройство компенсации перекосов и биений, отличающийся тем, что, с целью повышения нагрузочной способности, кинематической точности и достижения компактности, устройство компенсации выполнено в виде двух промежуточных колец, установленных концентрично с обеих сторон гайки, связывающих кольца с гайкой и рабочим органом двух пар, перпендикулярных одна другой, и диаметрально расположенных продольных упругих лент с полуцилиндрическими концами для крепления их кронштейнов, устанавливаемых с возможностью установочного перемещения в осевом направлении и фиксации на рабочем органе, имеющем для этого винты с коническими концами, предназначенными для взаимодействия с ответными отверстиями кронштейнов рабочего органа, закрепленного на рабочем органе дополнительного кронштейна с параллельным оси ходового винта пазом, а устройство предохранения от проворота представляет собой консольно закрепленный на § гайке ролик с осью, параллельной оси ходового винта, взаимодействующий с пазом дополнительного кронштейна. (Л tc о со CD fS S фиг f
2афаг f
Г- г
г
да S
к Jj /j
Фс/г 8
2S
J5
J7
ВНИИПИ Заказ 495/47 Тираж 880 Подписное Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Механизм перемещения суппорта токарного станка | 1978 |
|
SU740408A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
