. Изобретение от Чосится к сельскому хозяйству, в частности к устройствам для прё ддойпь йой санитарной о6р2бртки;выме НйЧо ЗОВЫ.:; . .Ј;,vC:-.., :; .,- ,,:. ,, ,; у -. л
Цель изобретений;- ftb bi eVtMe надеж- ности работы гзн 1пулят0ра. -.- ;.. /; . ; На фиг. 1 и:зЬбр8жейа 1бя1| х.ём.е| ла га ёмрго манипулятора;: на фиг. 2 - прин- ийпйа/тьйая .; у г .: : , -; Автбйатйчёёкм ма со держит упругие сйль-фоны 1 , лёвьт 3 и правый 4 по нэпр авлёнйю pt Exdflt e cfSiiioK преобра-: зов атеЩ К(л р.же 1 я :л | т Ъ1г;о ё п|род 6 / |э- HOM Ha rt pҐBneHUwrn e 8 e i« 6 H hpa Bbie.:i7 и 8 U666p af6t$ в; станке в поперечйом найр аэлек й, пне вмо- цилиндры 9 и 10 перед:й1к Л йШй мов, пнев- мб цил индры 11 и;: J2 перемёгцейия в продольном напр влёкйй. пнёййоцилйнд- ры 13 и 14 перёме;|цешй в поперечном Направлении, преобразователь 15 рёгист- Р ации Ноявле ния кбровУ в стзнке, зозДухо распределитель 16, усийктель 17, первый 18, второй 19, третий 20;четвертый 21, пятый 22, шестой 23, седьшй 24 и восьмой 25 логические блоки, бло кЙ ториионнрг о До- зирЬвайия с питью клзпзнз я 27-31 и тремя емкостями 32-34, релё cJ§afeHeH и эле- мёнтЗбЗАПРЁТ.Преоёразовзтель 15 пряв- :лё:нйя кб рбвы в стзнке Шёдинен с входом усилитгеля 17, выход кбМрогб Связйч с пёр: выми входами первого Щ„й пятого 22 логических блоков. Полос ти упругих сильфонов ,,.1 и 2 соедййёньз ме тзду лзбойГс п Ьри . мй ол р с н й ficHeBMoU:iiivs;Hfi|50B Э . й Тб пё- : ре дних прижимов, вторим входом пятрго логического блока 22 и :гн50 1й М йШод6м . воздухораспределителя 16, fefорой выход ; которого; связйн со штоковьшн попостями .. пне8йоиилин др. 9 «.10 переднйх. мой. з рход ссед н;ё с е«х0дом элемента 36 ЗАПРЁТ Вхой п.осНедиего совнещён.с ис- т о чШШй дайле я й;пёрбййй :ьход: 1йй второго 19 и третьего 20 логических блоко в.
причем выход третьего 20 логического блока связан со штоковсй полостью пневмоци- линдра 11 перемещения в продольном на правлении, поршневая полость которого;
соединена с выходом четвертого 21 логического блока, щтрковая полость пневмоци - линдра 12 перемещения в продо.ль.ном направлении связана с выходом седьмого 24 логического блока, а поршневая полость
Этого пневмодилй йдра соединёна с выходом восьмого 25 логического блока, первый вхбд которого совмещен с первым выходом
пятого 22 логического блока, а второй выход соединен с-преобразователем 4 положения жйвотйо гб в продольном направлении. Пре- обрэзовательЗ положения животного в продольном направлении связан с первым входом четвертого 21. логического блока,
второй вход которого подключен к первому выходу первого 18 логического блока, при этом.второй выход последнего связан с поршневой полостью пневмоцилиидра 13 перемещения в поперечном направлении, Штокойзя полость которого соединена с вы- ходом второго 19 логического блока, второй 4 вход которого связан посредством преобра- .зователей 5 и 6 животного в по- перечном направлении с входами первого 18 и третьего 20 логических блоков. Посредством преобразователей 7-и 8 положения животного s поперечном направлении соединены второй вход шестого логического блока 23, первый вход которого подключен к источнику давления и
первому входу седьмого логического блока 24. и второй вход седьмого логического блока24. : ,-.: ;: .; :..;:- ; :; .;..
Пор шнёпая полость пневмоцилиндра .14 перемещения в поперечном направле- нй и соединена с вторым выходом пятого логического блока 22. второй вход которого связан с преобразователями 7 и 8 пстоже- ни я жив Отного в продольном направлении, при этом штркопая полость соединена с оы
ходом шестого логического блока 23. Выходы первого 27 и второго 28 клапанов блока 25 порционного дозирования связаны соответственное преобразователями 3 и 4 положения животного в продольном направлении и вторыми входами третьего 29 и четвертого клапанов, а выходы первого 27 и второго 28 клапанов блока 26 порционного дозирования через первую 32 и вторую 33 емкости соединены соответственно с первыми входами третьего 29 и четвертого 30 клапанов, выходы которых связаны через третью емкость 34 с входом реле 35 сравнения и через пятый клапан 31с входом усилителя 17.
Автоматический манипулятор работает следующим образом.
До впуска коровы в станок устройства
- для фиксации правой и левой задних конечностей находятся в крайних положениях. Штоковые полости пневмоцилиндров 9 и 10 передних прижимов находятся под воздействием единичного сигнала. Входя в станок, корова воздействует на упор преобразователя 15 регистрации появления коровы, на выходе которого устанавливается единичный сигнал. Усиленный посредством усили- теля 17 сигнал подается на первые входы первого 18 и пятого 22 логических блоков, которые связаны с пневмоцилиндрами
13 и 14 перемещения в поперечном направлении. Левое и правое устройства
для фиксации задних конечностей коровы
- f перемещаются до момента соприкоснове имя каждого упора преобразователей 5-8
положения животного в поперечном направлении с одной из конечностей, после
чего их дальнейшее перемещение прекра: щается. Одновременно сигнал от преобра , зователей 5-8 положения животного в
...- поперечном направлении поступает в чет, вертый 21 и восьмой 25 логические блоки,
; которые включают пневмоцилиндры 11 и 12
для перемещения устройств фиксации в
продольном направлении до момента соприкосновения упоров преобразователей 3 и 4 положения животного в продольном на правлении. Сигналы на прекращение движения с их выходов подаются на четвертый 21 и восьмой 25 логические блоки и в блок .: 26 порционного дозирования. Подача сиг- ... налов может быть смещена по времени. При
этом сопла клапанов 29 и 30 открываются, а cortna клапанов 27 и 28 закрываются.
Дозированная порция воздуха из емко- . стей 32 и 33 подается в емкость 34. Суммарная порция воздуха достаточна для
переключения реле 35 сравнения, выход ко- ... торого связан через элемент 36 ЗАПРЕТ с
- воздухораспределителем 16, выходом соединенным с пневмоцилиндрами 9 и Юпере5 дних прижимов, упругими сильфонами 1 и 2 и вторым входом пятого логического блока 22. Происходит одновременная фиксация задних конечностей коровы. При несимметричном расположении задних конечностей
0 клапаны 27-30 срабатывают неодновременно. В этом случае левое или правое устройство для фиксации соответствующей задней конечности коровы находится в ждущем режиме до тех пор, пока не появится сигнал на
5 одновременность фиксации. По истечении времени цикла мойки и очистки, определяемого соотношением . элемент 36 ЗАПРЕТ переключается и на его выходе устанавливается нулевой сигнал, конечности расфиксируются, так как воздухораспределитель 16 соединяет с атмосферой полости упругих сильфонов 1 и 2и штоковые полости пневмоцилиндров 9 и 10. Сигнал окончания преддоильной обработки вымени подается одновременно в третий 20 и седьмой 24 логические блоки, а затем во второй 19 и шестой 23 логические, блоки. Срабатывают пневмоцилиндры 11 и 12, а затем 13 и 14. Устройства для фиксации от0 водятся в нерабочее положение. После выхода коровы из станка на выходе преобразователя 15 регистрации появления коровы устанавливается нулевой сигнал, под действием которого клапан 31 опорож5 няет емкость 34, а на выходе реле 35 сравнения устанавливается нулевой сигнал. Схема подготовлена для следующего цикла работы - фиксации задних конечностей следующей коровы.
0 Формулаизобретения
Автоматический манипулятор для фиксации задних конечностей коровы, содержащий устройства для фиксации задних левой и правой конечностей животного, воз5 духораспределитель. преобразователи положения животного в станке в продольном и поперечном направлениях, преобразователь появления коровы в станке, первый, второй, третий, и четвертый логические
0 блоки и усилитель, при этом устройство для фиксации задних конечностей животного выполнено в виде переднего, заднего и двух боковых прижимов для каждой ноги, связанных с исполнительным пнесмоци5 линдром и сообщенным с ним сильфоном, причем корпус исполнительного пневмо- цилиндра связан с системой пневмоцилиндров для перемещения прижимов в продольном и поперечном направлениях, а
0 выходы воздухораспределителя подключены к соответствующим полостям исполнительных пневмоцилиндров и сильфонов, при этом преобразователь появления коровы в станке посредством усилителя связан
с первым входом первого логического блока, о т л и ч а га щ и и с я тем, что, с целью пЙвышёния надежности, он снабжен пятым. шестым, седь йьш и восьмым логическими
..блоками, реле сравнения,блоком порцион- лого дозмровайй я и элементом ЗАПРЕТ, при этом выходы левого по направлению от входа в станок преобразователя положения животногб в поперечном направлении соединены с вторыми входами первого, второго и третьего логических блоков; выходы правого по направШйию от входа в станок прё- образовётёлй положения Животного в поперечном направлении соединены с вторыми входами пятого, шестого и седьмого логических блоков, выходы левого на- правлению от входа в станок преобразова теля положения животного в продольном направлении совмещены с первыми входа- йй- четвертого логическогб блока и блока порайонного дЬзйрованйя а выходы пра- вого понаправлению от ехида в станок прё: обрйзыайтеля изложения животного в прбДольном на правлений соемеицёны с со- ответСтвуюЩймй вторыШ Йходами восьмо- го лбгйческогб блока и блока порционного
: 0 5
- 5
0
дозирования, выход которого связан с входом реле сравнения, а третий вход соединен. с выходом усилителя, причем первые входы второго и трет.ьего логических блоков связаны с источником давления и первым входом элемента ЗАПРЕТ, второй вход которого совмещен с выходом реле сравнения, а выход соединен с воздухораспределителем, кроме того, исто чнйк давления подключен к первым входам шестого и седьмого логических блоков, первый выход первого логического блока совмещён с вторым входом, четвертого логического блока, а первый выход воз- духораспределителя связан с первым входом пятого логического блока, третий вход которого совмещен с выходом усилителя, причем первый выход пятого логического блока соединен с первым входом восьмого логического блока, ai выходы вто- pdrb ; третьего, четвертого, шестого, седьмого, восьмого и вторые выходы первого и пятого логических блоков совмещены с со- ртветствующимй входами системы пневмо- цилиндров для перемещения прижимов конечностей животного в продольном и поперечном направлениях. .
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический манипулятор для фиксации задних конечностей коровы | 1987 |
|
SU1628989A1 |
| Преобразователь положения с автоматическим манипулятором для преддоильной санитарной обработки вымени коров | 1987 |
|
SU1667751A1 |
| Индивидуальный дозатор-увлажнитель корма | 1988 |
|
SU1674753A1 |
| Тренировочно-игровое устройство для станочника | 1985 |
|
SU1299594A1 |
| Автоматический манипулятор для преддоильной санитарной обработки вымени коров | 1985 |
|
SU1500217A1 |
| Устройство для управления доильным аппаратом | 1988 |
|
SU1655391A1 |
| Зубодолбежный станок | 1990 |
|
SU1734984A1 |
| Измерительная система с автоматическим контролем аналого-цифрового преобразования и блок задания нечувствительности | 1991 |
|
SU1837261A1 |
| Станок для бандажирования | 1984 |
|
SU1277304A1 |
| Система бесперебойного питания | 1990 |
|
SU1807546A1 |

Изобретение относится к сельскому хозяйству, в частности к устройствам для преддоильной санитарной обработки вымени коровы. Цель изобретения - повышение надежности работы манипулятора. Автоматический манипулятор для фиксации задних конечностей коровы снабжен блоком 26 порционного дозирования, реле 35 сравнения, элементом 36 ЗАПРЕТ, воздухораспре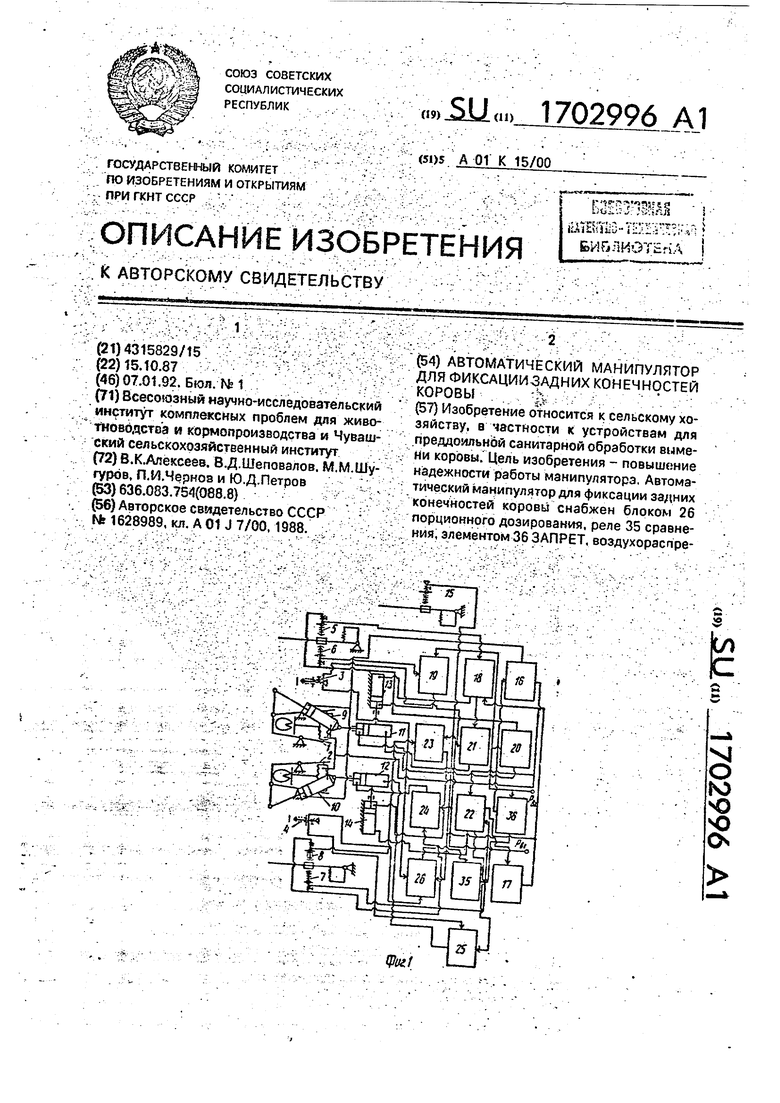
| Автоматический манипулятор для фиксации задних конечностей коровы | 1987 |
|
SU1628989A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ; : : | |||
