Изобретение относится к автоматизации процессов для преддоильной санитарной обработки вымени коров.
Цель изобретения - повышение эксплуатационной надежности.
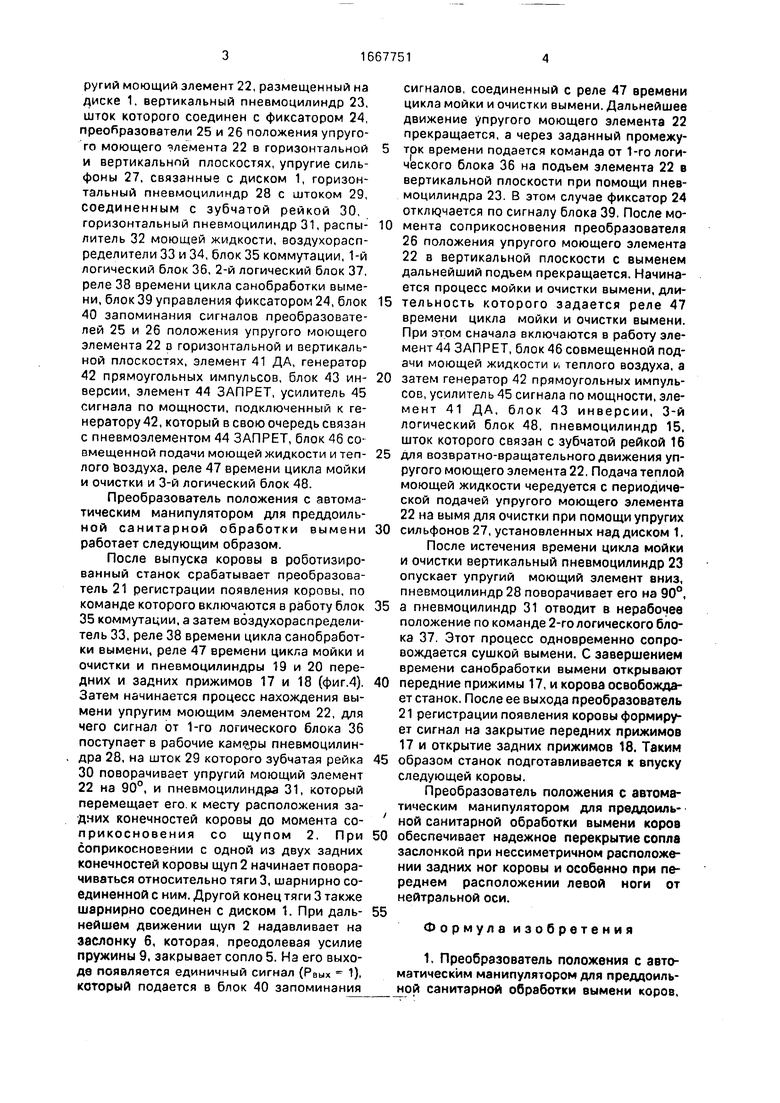
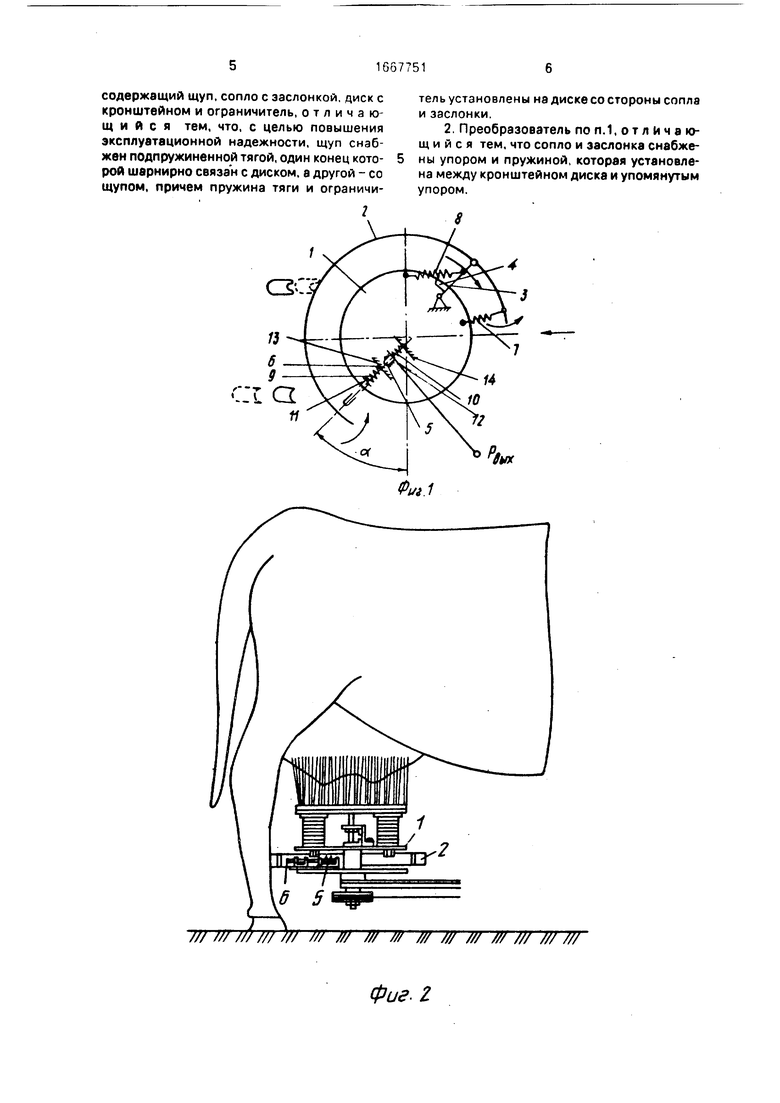
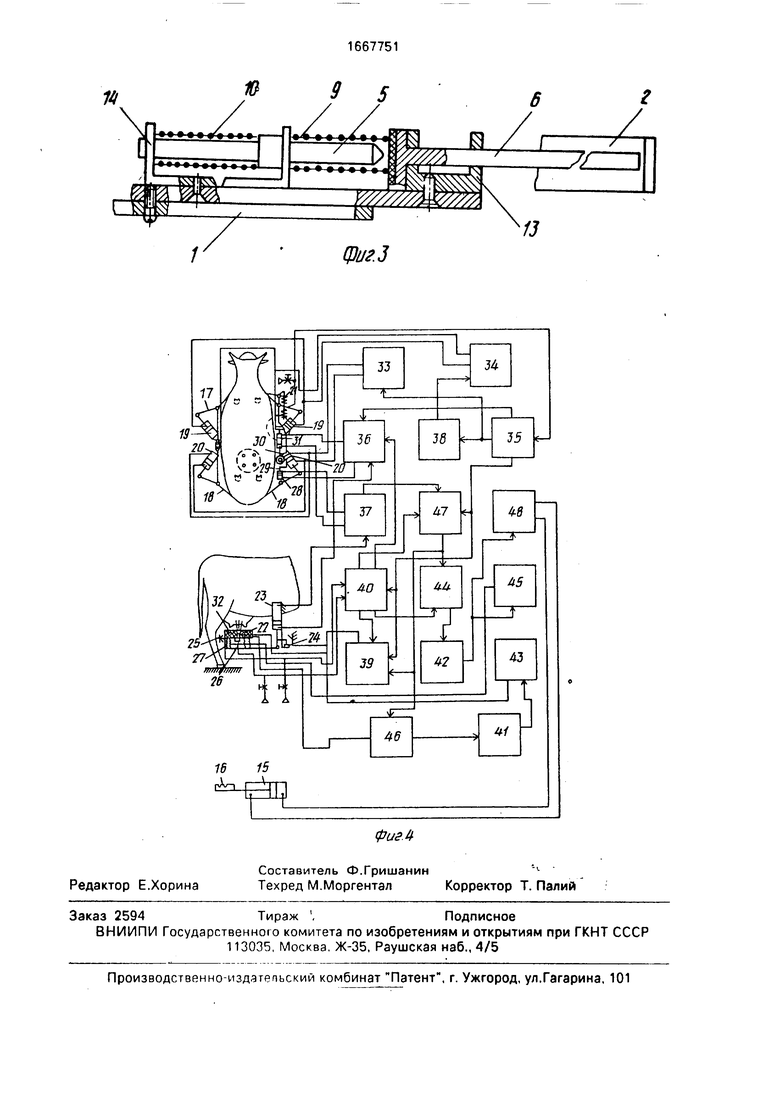
На фиг.1 показана функциональная схема преобразователя, где РВых - выходной сигнал, связанный с блоком запоминания сигналов автоматического манипулятора, а -угол между вертикальной осью и пнев- моконтактом сопло-заслонка; на фиг.2 - схема размещения упругого моющего элемента, установленного на преобразователе положения; на фиг.З - схема узла взаимодействия щупа с заслонкой; на фиг.4 - блок-схема манипулятора.
Преобразователь включает диск 1. на котором установлены щуп 2, тяга 3, ограничитель 4, сопло 5, заслонка б, пружины 7-10, упоры 11 и 12 и кронштейны 13 и 14.
Тяга 3 своими концами шарнирно связана со щупом и с диском с образованием двухзвенника. Пружина 8 тяги и ограничитель 4 расположены на диске 1 со стороны сопла 5 и заслонки 6. Пружина 10 установлена между кронштейном 14 диска и упором 12.
Манипулятор для преддоильной санитарной обработки вымени содержит пнев- моцилиндр 15, связанный с зубчатой рейкой 16, передние и задние прижимы 17 и 18 с пневмоцилиндрами 19 и 20, преобразователь 21 регистрации появления коровы, упо о VI VJ ел
ругий моющий элемент 22, размещенный на диске 1. вертикальный пневмоцилиндр 23, шток которого соединен с фиксатором 24, преобразователи 25 и 26 положения упругого моющего элемента 22 в горизонтальной и вертикальной плоскостях, упругие силь- фоны 27, связанные с диском 1, горизонтальный пневмоцилиндр 28 с штоком 29, соединенным с зубчатой рейкой 30, горизонтальный пневмоцилиндр 31, распылитель 32 моющей жидкости, воздухораспределители 33 и 34, блок 35 коммутации, 1-й логический блок 36, 2-й логический блок 37, реле 38 времени цикла санобработки вымени, блок 39 управления фиксатором 24, блок 40 запоминания сигналов преобразователей 25 и 26 положения упругого моющего элемента 22 в горизонтальной и вертикальной плоскостях, элемент 41 ДА, генератор 42 прямоугольных импульсов, блок 43 инверсии, элемент 44 ЗАПРЕТ, усилитель 45 сигнала по мощности, подключенный к генератору 42, который в свою очередь связан с пневмоэлементом 44 ЗАПРЕТ, блок 46 совмещенной подачи моющей жидкости и теплого воздуха, реле 47 времени цикла мойки и очистки и 3-й логический блок 48.
Преобразователь положения с автоматическим манипулятором для преддоиль- ной санитарной обработки вымени работает следующим образом.
После выпуска коровы в роботизированный станок срабатывает преобразователь 21 регистрации появления коровы, по команде которого включаются в работу блок 35 коммутации, а затем воздухораспределитель 33, реле 38 времени цикла санобработки вымени, реле 47 времени цикла мойки и очистки и пневмоцилиндры 19 и 20 передних и задних прижимов 17 и 18 (фиг.4). Затем начинается процесс нахождения вымени упругим моющим элементом 22, для чего сигнал от 1-го логического блока 36 поступает в рабочие камеры пневмоцилин- дра 28, на шток 29 которого зубчатая рейка 30 поворачивает упругий моющий элемент 22 на 90°, и пневмоцилиндра 31, который перемещает его. к месту расположения задних конечностей коровы до момента соприкосновения со щупом 2, При соприкосновении с одной из двух задних конечностей коровы щуп 2 начинает поворачиваться относительно тяги 3, шарнирно соединенной с ним. Другой конец тяги 3 также шарнирно соединен с диском 1. При дальнейшем движении щуп 2 надавливает на заслонку 6, которая, преодолевая усилие пружины 9, закрывает сопло 5. На его выходе появляется единичный сигнал (Рвых 1), который подается в блок 40 запоминания
сигналов, соединенный с реле 47 времени цикла мойки и очистки вымени. Дальнейшее движение упругого моющего элемента 22 прекращается, а через заданный промежуток времени подается команда от 1-го логического блока 36 на подъем элемента 22 в вертикальной плоскости при помощи пнев- моцилиндра 23. В этом случае фиксатор 24 отключается по сигналу блока 39. После момента соприкосновения преобразователя 26 положения упругого моющего элемента 22 в вертикальной плоскости с выменем дальнейший подъем прекращается. Начинается процесс мойки и очистки вымени, длительность которого задается реле 47 времени цикла мойки и очистки вымени. При этом сначала включаются в работу элемент 44 ЗАПРЕТ, блок 46 совмещенной подачи моющей жидкости и теплого воздуха, а
затем генератор 42 прямоугольных импульсов, усилитель 45 сигнала по мощности, элемент 41 ДА, блок 43 инверсии, 3-й логический блок 48, пневмоцилиндр 15, шток которого связан с зубчатой рейкой 16
для возвратно-вращательного движения упругого моющего элемента 22. Подача теплой моющей жидкости чередуется с периодической подачей упругого моющего элемента 22 на вымя для очистки при помощи упругих
сильфонов 27, установленных над диском 1,
После истечения времени цикла мойки
и очистки вертикальный пневмоцилиндр 23
опускает упругий моющий элемент вниз,
пневмоцилиндр 28 поворачивает его на 90°,
а пневмоцилиндр 31 отводит в нерабочее положение по команде 2-го логического блока 37. Этот процесс одновременно сопровождается сушкой вымени. С завершением времени санобработки вымени открывают
передние прижимы 17, и корова освобождает станок. После ее выхода преобразователь 21 регистрации появления коровы формирует сигнал на закрытие передних прижимов 17 и открытие задних прижимов 18. Таким
образом станок подготавливается к впуску следующей коровы.
Преобразователь положения с автоматическим манипулятором для преддоиль- ной санитарной обработки вымени коров
обеспечивает надежное перекрытие сопла заслонкой при нессиметричном расположении задних ног коровы и особенно при переднем расположении левой ноги от нейтральной оси.
Ф о р м у л а и з о б р е т е н и я
1, Преобразователь положения с автоматическим манипулятором для преддоиль- jjpft санитарной обработки вымени коров.
содержащий щуп, сопло с заслонкой, диск с кронштейном и ограничитель, отличающийся тем, что, с целью повышения эксплуатационной надежности, щуп снабжен подпружиненной тягой, один конец которой шарнирно связан с диском, а другой - со щупом, причем пружина тяги и ограничи2
GU
тель установлены на диске со стороны сопла и заслонки.
2. Преобразователь поп.1, отличающийся тем, что сопло и заслонка снабжены упором и пружиной, которая установлена между кронштейном диска и упомянутым упором.
Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический манипулятор для преддоильной санитарной обработки вымени коров | 1985 |
|
SU1500217A1 |
| Автоматический манипулятор для фиксации задних конечностей коровы | 1987 |
|
SU1628989A1 |
| Автоматический манипулятор для фиксации задних конечностей коровы | 1987 |
|
SU1702996A1 |
| Автоматический манипулятор для преддоильной санитарной обработки вымени коров | 1985 |
|
SU1377083A1 |
| Манипулятор к доильным аппаратам | 1982 |
|
SU1113055A1 |
| Устройство для обработки вымени коровы перед дойкой | 1983 |
|
SU1147299A1 |
| Устройство для преддоильной обработки вымени и доения животных | 1986 |
|
SU1349735A1 |
| Устройство для преддоильной обработки вымени | 1982 |
|
SU1147297A1 |
| Манипулятор доильной установки | 1987 |
|
SU1440427A1 |
| Устройство для управления доильным аппаратом | 1979 |
|
SU1442978A2 |
Изобретение относится к области сельского хозяйства. Целью изобретения является повышение эксплуатационной надежности. Преобразователь положения с автоматическим манипулятором выполнен в виде двухзвенника с шарнирно взаимосвязанными между собой щупом 2 и тягой 3, каждый из которых соединен с пружинами 7 и 8, связанными с диском 1. Диск шарнирно соединен с тягой, при этом ограничитель 4 и пружина 8 установлены на диске со стороны сопла 5 и заслонки 6. Сопло и заслонка снабжены упором 12 и пружиной 10, установленной между кронштейном 14 диска и упором. Преобразователь в начале процесса обработки вымени обеспечивает перекрытие сопла 5 заслонкой 6 при несимметричном расположении задних ног коровы и точную установку моющего элемента под выменем. 1 з.п. ф-лы, 4 ил.
7fT7ff ff/ff/ /// /// ff/ /// /// ff/ /// /// /ff /// /// ///
Фие-Z
фиг.З
13
| Автоматический манипулятор для преддоильной санитарной обработки вымени коров | 1985 |
|
SU1500217A1 |
