гв
€
сл
ел
О
о o

| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь положения с автоматическим манипулятором для преддоильной санитарной обработки вымени коров | 1987 |
|
SU1667751A1 |
| Индивидуальный дозатор-увлажнитель корма | 1988 |
|
SU1674753A1 |
| Устройство для обработки вымени коровы перед дойкой | 1983 |
|
SU1147299A1 |
| Манипулятор к доильным аппаратам | 1982 |
|
SU1113055A1 |
| Автоматический манипулятор для преддоильной санитарной обработки вымени коров | 1985 |
|
SU1377083A1 |
| Индивидуальный дозатор корма | 1988 |
|
SU1590059A1 |
| Автоматический манипулятор для фиксации задних конечностей коровы | 1987 |
|
SU1628989A1 |
| Индивидуальный дозатор корма в зависимости от величины надоя | 1985 |
|
SU1416090A1 |
| Доильная установка | 1987 |
|
SU1493188A1 |
| Автоматический манипулятор для фиксации задних конечностей коровы | 1987 |
|
SU1702996A1 |
Изобретение относится к сельскому хозяйству, а именно к устройствам для автоматизации содержания животных. Целью изобретения является сокращение времени санитарной обработки за счет создания благоприятных условий для коров. После впуска коровы переключается воздухораспределитель 61 и перемещает пневмоцилиндр 15, который подводит кормушку к корове и в которую выдается порция корма. Сигнал с датчика 22 регистрации появления коровы поступает в блок 48 управления горизонтальными 31, 34 и вертикальным 24 пневмоцилиндрами, которые подводят упругий моющий элемент 23 под вымя коровы. Генератор 58 импульсов посредством усилителя 57 приводит в действие упругие сильфоны 29. Одновременно происходит подача моющей жидкости через распылитель 35 моющей жидкости. С окончанием мойки в последний подается теплый воздух. После окончания цикла санобработки передние прижимы 18 открываются, освобождая корову. 4 ил.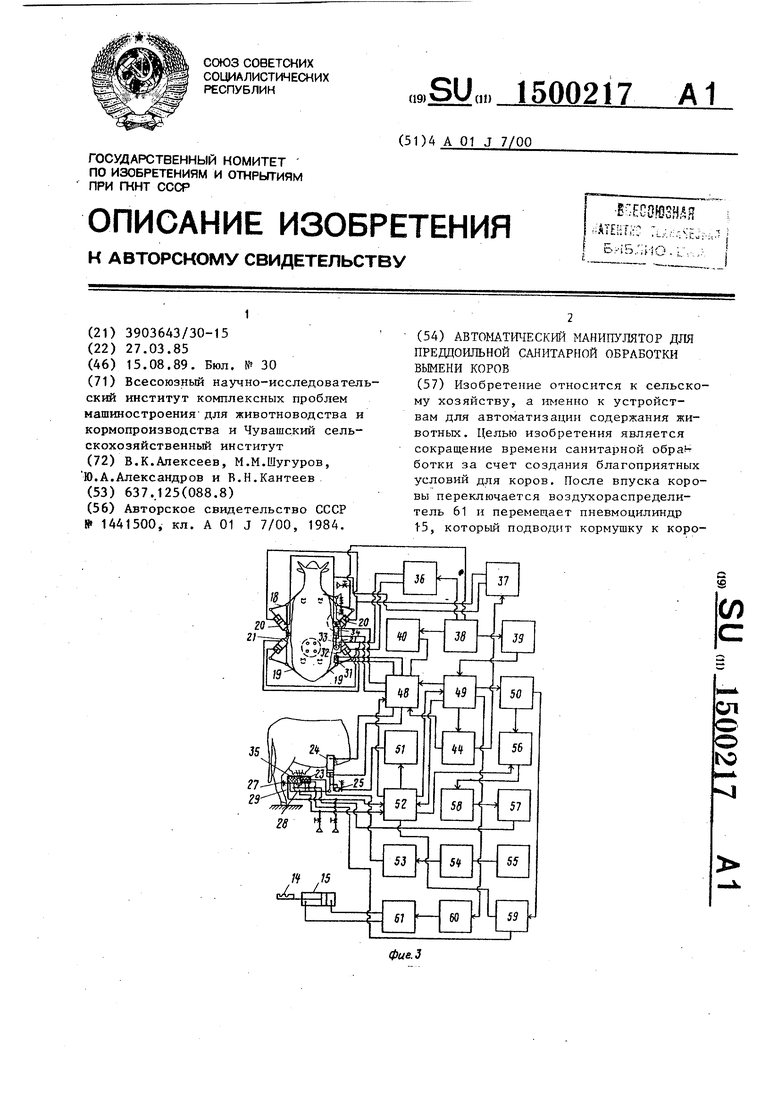
П ,15
ве и в которую вьщается порция корма. Сигнал с датчика 22 регистрации появления коровы поступает в блок 48 управления горизонтальными 31, 34 и вертикальным 24 пневмоципиндрами, которые подводят упругий моющий элемент 23 под вымя коровы. Генератор 58 импульсов посредством усилителя
Изобретение относится к сельскому хозяйству, а именно к устройствам для автоматизации содержания животных.
Цель изобретения - сокращение времени санитарной обработки за счет создания благоприятных условий для коров.
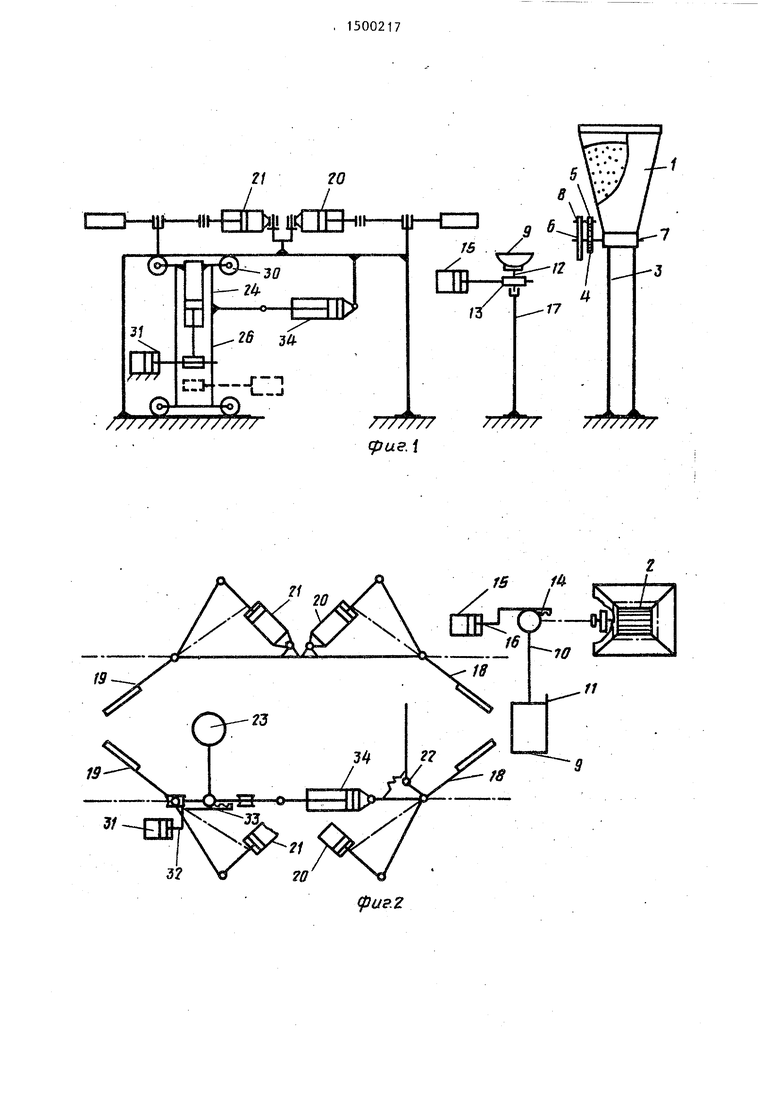
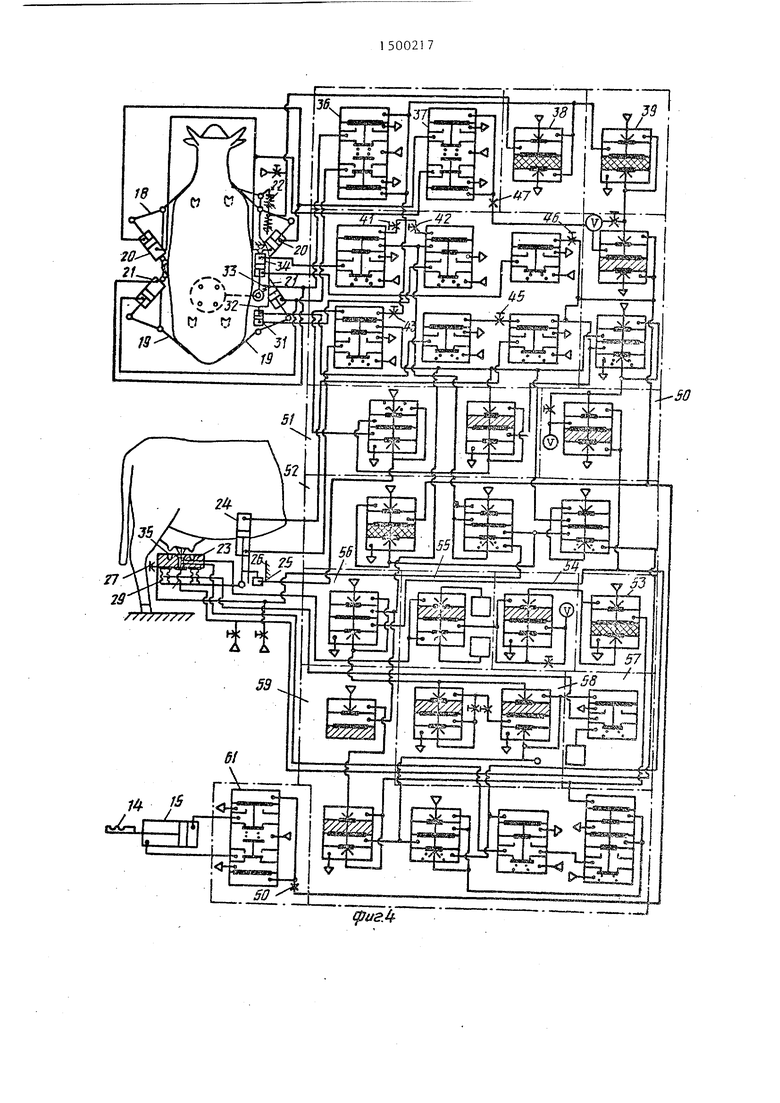
На фиг. 1 показан автоматический манипулятор; на фиг. 2 - то же, вид сверху; на фиг. 3 - блок-схема манипулятора; на фиг. 4 - принципиаль- ная схема.
Автоматический манипулятор включает бункер 1, объемный поворотный дозатор 2, стойки 3 для крепления бункера 1, храповой механизм дозато- ра 2 с храповым колесом 4, собачкой 5,, тягой б, установленной совместно с храповым Колесом 4 на валу 7 до- затора 2, осью 8 кормушку 9, установленную на штанге 10 с упором 11, ось 12 с зубчатым колесом 13, зубчатой рейкой 14, пневмоципиндр 15 со штоком 16 и стойкой 17 дня крепления кормушки 9, передаие и задние прижимы 18, 19 с блоками управления по- ложением прижимов, выполненных в виде пневмоцилиндров 20, 21, датчик 22 регистрации появления коровы, узел перемещения упругого моющего элемента, включающий упругий моющий элемент 23, вертикальный пневмоци- линдр-24, фиксатор 25, направляющие 26, датчики 27 и 28 положения упругого моющего элемента 23 в горизонтальной и вертикальной пло.скостях, упругие сильфоны 29, ролики 30, горизонтальный пневмоципиндр 31 со штоком 32, соединенным с зубчатой рейкой 33, горизонтальный пневмоципиндр 34, распылитель 35 моющей жидкости, а также блок программного управления включающий воздухораспределители 36 37, пневмоэлементы 38, 38 ДА, блок 40 с регулируемыми пневмосопротивле57 приводит в действие упругие силь- фоны 29. Одновременно происходит подача моющей жидкости через распылитель 35 моющей жидкости. С окончанием мойки в последний подается теплый воздух. После окончания цикла санобработки передние прижимы 18 открываются, освобозкдая корову. 4 ил.
ниями 41, 42, 43, блок 44 с регулируемыми и нерегулируемыми пневмо- сопротивлениями 45, 46, 47, блок 48 управления горизонтальными и вертикальными пневмоцилиндрами 31, 34 и 24, реле 49, 50 вермени цикла сан- обработки и мойки, блок 51 управления пневматическим фиксатором 25, блок 52 запоминания сигналов датчиков, пневмоэлемент 53 ДА, генератор 54 импульсов, инвертор 55, пневмоэлемент 56. ЗАПРЕТ, усилитель 57, генератор 58 импульсов, блок 59 совместной подачи моющей жидкости и теплого воздуха, а также, нерегулируемое пневмосопротивление 60 и воздухораспределитель 61 .
Манипулятор работает следующим образом.
Перед выпуском коровы кормушка 9 находится в положении, перпендикулярном его продольной оси, а передние прижиы 18 закрыты. После впуска коровы начинается процесс отыскания вымени, санобработка, а затем сушка вымени. С появлением на выходе реле 49 сигнала он проходит через нера- гулрфуемое пневмосопротивление 60, переключает воздухораспределитель 61. Шток 16 пневмоцилиндра 15, сое- диненньш жестко с зубчатой рейкой 14 перемещается налево и поворачивает зубчатое колесо 13 и вместе с ним щтангу 10 с кормушкой 9 против часо- ой стрелки к дозатору 2. Дозатор 2 установлен в выходном патрубке бункера 1, прикрепленного на стойках 3 к фундаменту. Один раз в сутки бункер 1 заполняется концентрированным кормом. При достижении упора 11 тяга 6 начинает поворачиваться относительно вала дозатора 7, Одновременно начинает поворачиваться ее второй конец, на котором установлена ось 8 с собачкой 5. Последняя поворачивает зубчатое колесо 4 совместно с дозатором 2 на такой угол, при котором корм в количестве 150-200 г поступает в кормушку 9. После поворота тяги 6 на заданный угол ее дальнейшее перемещение прекращается. С выпуском коровы из .станка на выходе реле 49 появляется нулевой сигнал, кормушка 9 под действием, пневмоцилиндра 15 снова устанавливается в положение перпендикулярное продольной оси станка. Тяга 6 под действием силы тяжести возвращается в вертикальное положение перемещая собачку 5 на один зуб зубчатого колеса 4. Дозатор 2 и храповой механизм занимают исходное положение для вьщачи следующей дозы корма. После подвода кормушки 9 . закрываются передние прижимы 18, а задние прижимы открывают для впуска следующей коровы. При этом, после захода коровы в станок включается датчик 22 регистрации появления коровы, сигнал на выходе которого переключает пневмоэлемент 38, а затем пневмоэлемент 39 ДА и воздухораспределитель 36. Задние прижимы 19 под действием пневмоципиндров 21 закрываются. Сигнал через пневмосопротив- ления 42-, 41, 43 подается в блок 48 для установки упругого моющего элемента 23 под выменем коровы. Отыскание вымени осуществляется при помощи датчиков 27 и 28, выхода которых подключены к блоку 52 запоминания. . Высота положения упругого моющего элемента 23 поддерживается постоянной во время мойки вымени включением фиксатора 25, соединенного с блоком 51
управления, относительно направляющей 40 на ней упором и пневмоцилиндром.
ле 50, а время цикла санобработки при помощи реле 49. С окончанием мойки на выходе пневмоэлемента 56 ЗАПРЕТ устанавливается нулевой сигнал. Начинается процесс сушки вымени, при котором в распылитель 35 подается теплый воздух. После окончания цикла- санобработки открываются передние прижимы 18 и корова освобождается.
10
Формула изобр.е тения
Автоматический манипулятор для преддоильной санитарной обработки
15 вымени коров, содержапщй передние и задние прижимы с соответствующими блоками управления положением прижимов, датчик регистрации появления коровы, узел перемещения упругого мою20 щего элемента и блок программного управления с реле времени цикла санобработки, причем датчик регистрации появления коровы подключен к входу блока программного управления, соот25 ветствующие выходы которого связаны с входами блока управления положением прижимов и узла перемещения упругого моющего элемента, отличающийся тем, что, с целью
30 сокращения времени санитарной обра- ботки за счет создания благоприятных условий для коров, он снабжен воздухораспределителем, нерегулируемым пневмосопротивлением, бункером, в
25 выходном патрубке которого размещен объемный поворотный дозатор, рас- положенньй на одном валу с храповым механизмом, а также снабжен зубчатым колесом, кормушкой с расположенным
поршень которого посредством зубчатой рейки связан зубчатым колесом, закрепленным на вертикальной оси с возможностью поворота относительно ее
и связанньм посредством штанги с кормушкой, причем.упор расположен на кормушке с возможностью взаимодействия с тягой храпового механизма выходы воздухораспределителя подключены к соответствующим полостям пнев- моципиндра, а вход воздухораспределителя посредством нерегулируемого пневмосопротивления связан с выходом еле времени цикла санобработки.
С113- ш- i
f/ о
I
U4J№
ОтГ
3/
5 34
i::
-Г.
//////// ///////
3/
3
(pije.Z
(ригЛ
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
