Изобретение относится к подъемно- транспортному машиностроению, а именно, к крутонаклонным ленточным конвейерам, транспортирующим сыпучий материал, склонный к налипанию.
Цель изобретения - повышение надежности в работе консейера путем исключения повреждения лент кромками дугообразных лап и их завала транспортируемым материалом.
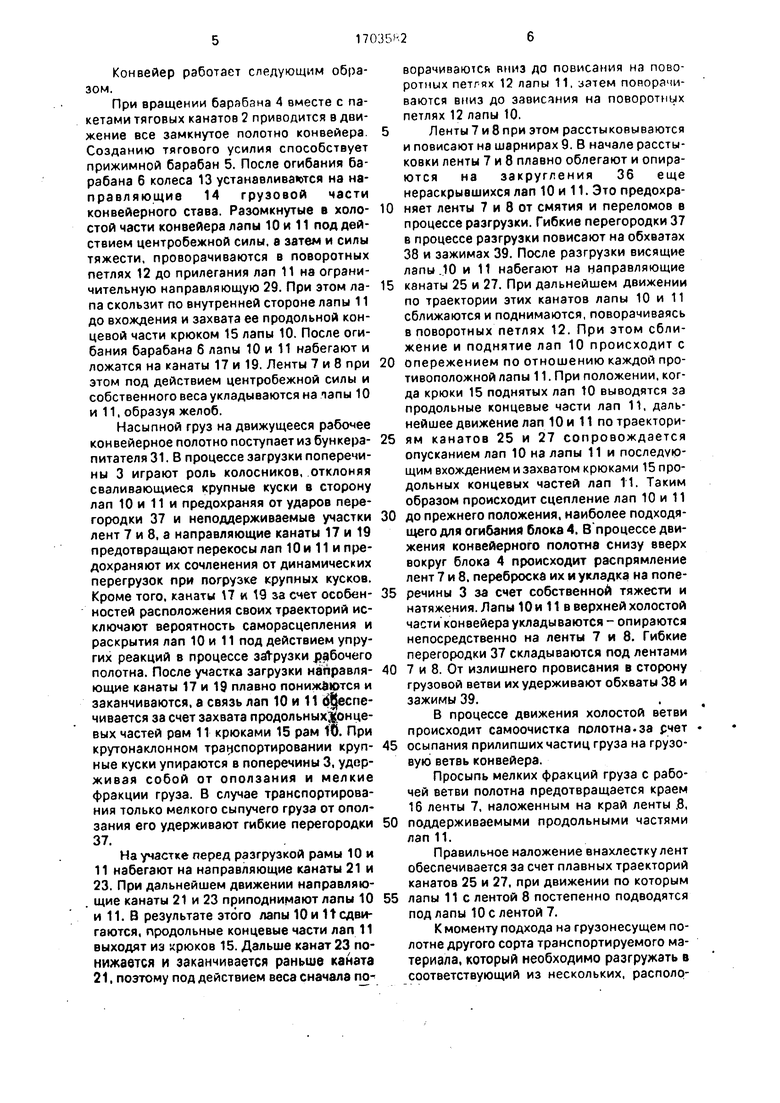
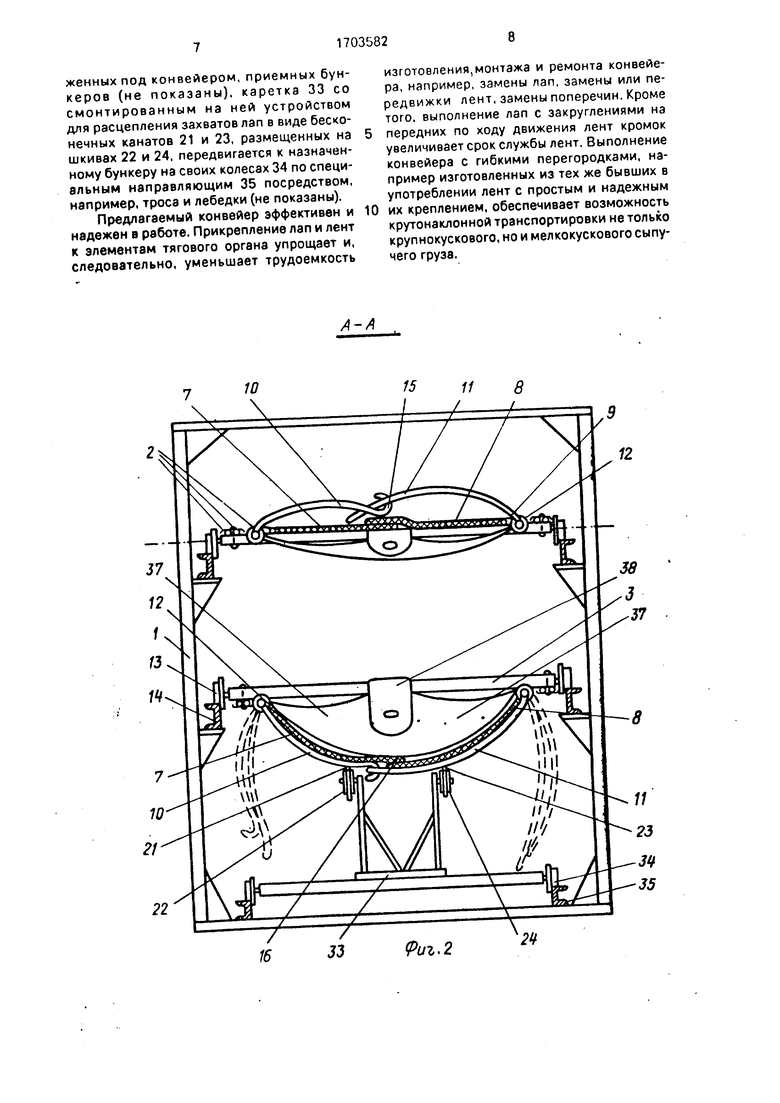
На фиг. 1 изображен общий вид крутонаклонного ленточного конвейера, вид сверху: на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1 (ленты условно не показаны, а кромки их изображены пунктирной с двумя точками линией); на фиг . 4 - разрез В-В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 1.
Крутонаклонный ленточный конвейер для крупнокусковых и вязких грузов состоит из конвейерного става 1, тяговых органов в виде пакетов канатов 2, прикрепленных к ним поперечин 3, приводного и прижимного барабанов 4 и 5, натяжного барабана 6, гру- зонесущего полотна в виде двух лент.7 и 8, которые одной стороной по внешнему краю прикреплены шарнирными зажимами 9 к отдельным тяговым канатам 2. Лапы 10 и 11 поворотными петлями 12 прикреплены внешними концами к тем же тяговым канатам 2. Поперечины 3 имеют на концах колеса 13, которые опираются на направляющие 14 грузовой и холостой частей конвейерного става. Лапы 10 для сцепления с лапами 11 имеют захваты в виде крюков 15. Лента 7 в рабочем положении наложена своим краем 16 на край стыкующейся ленты 8.
В местах загрузки и разгрузки конвейера расположены управляемые направляющие для сцепления и расцепления лап, выполненные в виде бесконечно замкнутых канатов, огибающих блоки.
На участке загрузки в нижней части конвейера лапы 10 опираются на направляющую в виде бесконечного каната 17, размещенного на шкивах 18, а лапы 11 в зоне этого же участка опираются на направляющую в виде бесконечного каната 19, размещенного на шкивах 20. При этом для обеспечения надежного сцепления лап 10с лапами 11, вначале, в зоне под натяжным блоком 6, канат 17 расположен ниже каната 19, Шкивы 18 и 20 расположены на разных уровнях. В месте непосредственной загрузки подвижные канаты 17 и 19 расположены на одном уровне, а затем канат 17 понижается и заканчивается раньше каната 19.
На участке перед разгрузкой лапы 10 опираются на направляющую в виде бесконечного каната 21, размещенного на шкивах 22, а лапы 11 опираются на направляющую в виде бесконечного каната 23, размещенного на шкивах 24. При этом для обеспечения надежного принудительного
расцепления лап 10 и 11 канаты 21 и 23 в местах набегания и прилегания к ним лап 10 и 11 расположены на одинаковом уровне. Затем канаты 21 и 23 расположены с подъемом вверх в сторону грузопотока, после
0 этого канат 23 понижается и заканчивается раньше каната 21.
На участке после разгрузки перед приводным блоком 4 лапы 10 опираются на направляющую в виде бесконечного каната
5 25, размещенного на шкивах 26, а лапы 11 опираются на направляющую в виде бесконечного каната 27, размещенного на шкивах 28. Для обеспечения правильного обратного сцепления лап 10 и 11,вначале канаты 25
0 и 27 расположены один от другого на расстоянии раскрытых лап 10 и 11, висящих на поворотных петлях 12, затем канаты 25 и 27 расположены с повышением и сближением. При этом траектория каната 25 имеет опере5 жающее превышение и сближение относительно траектории каната 27. На участке непосредственного сцепления лап 10 и 11 канат 25 понижается и заканчивается раньше и ниже каната 27.
0 Конвейерный став 1 в зоне огибания натяжного блока б имеет ограничительную направляющую в виде бесконечной цепной ленты 29, расположенной на роликах 30. Насыпной груз на нижнее рабочее полотно
5 конвейера подается из бункера-питателя 31 (фиг. 1).
При оснащении конвейера более широкой лентой 8, перекрывающей места входа крюков 15 в зацеплении с лапами 11, кром0 ка ленты 8 имеет поперечные разрезы 32 (фиг. 3).
Устройство для расцепления захватов- крюков каждой пары лап в виде направляющих из бесконечных канатов 21 и 23.
5 размещенных на шкивах 22 и 24, смонтировано на каретке 33, которая своими колесами 34 установлена на направляющих 35 (фиг. 1).
Для предотвращения при разгрузке смятия и изломов лент 7 и 8 передние по
0 ходу движения лент кромки лап 10 и 11 выполнены с закруглениями 36 (фиг. 2), радиус которых больше, чем радиус закругления задних кромок.
Конвейерное полотно снабжено гибки5 ми перегородками 37, которые прикреплены к поперечинам 3 обхватами 38, а по краям прикреплены к тяговым канатам 2 зажимами 39 (фиг. 3), гибкие перегородки не показаны, а кромки их отмечены пунктирной с тремя точками линией).
Конвейер работает следующим образом.
При вращении барабана 4 вместе с пакетами тяговых канатов 2 приводится в движение все замкнутое полотно конвейера. Созданию тягового усилия способствует прижимной барабан 5. После огибания барабана 6 колеса 13 устанавливаются на направляющие 14 грузовой части конвейерного става. Разомкнутые в холостой части конвейера лапы 10 и 11 под действием центробежной силы, в затем и силы тяжести, проворачиваются в поворотных петлях 12 до прилегания лап 11 на ограничительную направляющую 29. При этом лапа скользит по внутренней стороне лапы 11 до вхождения и захвата ее продольной концевой части крюком 15 лапы 10. После огибания барабана б лапы 10 и 11 набегают и ложатся на канаты 17 и 19. Ленты 7 и 8 при этом под действием центробежной силы и собственного веса укладываются на лапы 10 и 11, образуя желоб.
Насыпной груз на движущееся рабочее конвейерное полотно поступает из бункера- питателя 31. В процессе загрузки поперечины 3 играют роль колосников, отклоняя сваливающиеся крупные куски в сторону лап 10 и 11 и предохраняя от ударов перегородки 37 и неподдерживаемые участки лент 7 и 8, а направляющие канаты 17 и 19 предотвращают перекосы лап 10 и 11 и предохраняют их сочленения от динамических перегрузок при погрузке крупных кусков. Кроме того, канаты 7 и 19 за смет особенностей расположения своих траекторий исключают вероятность саморасцепления и раскрытия лап 10 и 11 под действием упругих реакций в процессе загрузки рабочего полотна. После участка загрузки направляющие канаты 17 и 19 плавно понижаются и заканчиваются, а связь лап 10 и 11 d|jecne- чивается за счет захвата продольных&онце- вых частей рам 11 крюками 15 рам 10. При крутонаклонном транспортировании крупные куски упираются в поперечины 3, удерживая собой от оползания и мелкие фракции груза. В случае транспортирования только мелкого сыпучего груза от оползания его удерживают гибкие перегородки 37.
На участке перед разгрузкой рамы 10 и 11 набегают на направляющие канаты 21 и 23. При дальнейшем движении направляющие канаты 21 и 23 приподнимают лапы 10 и 11. В результате этого лапы 10и Надвигаются, продольные концевые части лап 11 выходят из крюков 15. Дальше канат 23 понижается и заканчивается раньше каната 21, поэтому под действием веса сначала поворачиваются вниз до повисания на поворотных петгях 12 лапы 11, затем поворачиваются вниз до зависания на поворотных петлях 12 лапы 10.
5Ленты 7 и 8 при этом расстыковываются и повисают на шарнирах 9. В начале расстыковки ленты 7 и 8 плавно облегают и опираются на закругления 36 еще нераскрывшихся лап 10 и 11. Это предохра0 няет ленты 7 и 8 от смятия и переломов в процессе разгрузки. Гибкие перегородки 37 в процессе разгрузки повисают на обхватах 38 и зажимах 39. После разгрузки висящие лапы .10 и 11 набегают на направляющие
5 канаты 25 и 27. При дальнейшем движении по траектории этих канатов лапы 10 и 11 сближаются и поднимаются, поворачиваясь в поворотных петлях 12. При этом сближение и поднятие лап 10 происходит с
0 опережением по отношению каждой противоположной лапы 11. При положении, когда крюки 15 поднятых лап 10 выводятся за продольные концевые части лап 11, дальнейшее движение лап 10 и 11 потрзектори5 ям канатов 25 и 27 сопровождается опусканием лап 10 на лапы 11 и последующим вхождением и захватом крюками 15 продольных концевых частей лап 11. Таким образом происходит сцепление лап 10 и 11
0 до прежнего положения, наиболее подходящего для огибаний блока 4. В процессе движения конвейерного полотна снизу вверх вокруг блока 4 происходит распрямление лент 7 и 8. переброска их и укладка на попе5 ренины 3 за счет собственной тяжести и натяжения. Лапы 10 и 11 в верхней холостой части конвейера укладываются - опираются непосредственно на ленты 7 и 8. Гибкие перегородки 37 складываются под лентами
О 7 и 8. От излишнего провисания в сторону грузовой ветви их удерживают обхваты 38 и зажимы 39.
В процессе движения холостой ветви происходит самоочистка полотна.за счет
5 осыпания прилипших частиц груза на грузовую ветвь конвейера.
Просыпь мелких фракций груза с рабочей ветви полотна предотвращается краем 16 ленты 7, наложенным на край ленты .8.
0 поддерживаемыми продольными частями лап 11.
Правильное наложение внахлестку лент обеспечивается за счет плавных траекторий канатов 25 и 27, при движении по которым
5 лапы 11с лентой 8 постепенно подводятся под лапы 10 с лентой 7.
К моменту подхода на грузонесущем полотне другого сорта транспортируемого материала, который необходимо разгружать в соответствующий из нескольких, располрженных под конвейером, приемных бункеров (не показаны), каретка 33 со смонтированным на ней устройством для расцепления захватов лап в виде бесконечных канатов 21 и 23, размещенных на шкивах 22 и 24, передвигается к назначенному бункеру на своих колесах 34 по специальным направляющим 35 посредством, например, троса и лебедки (не показаны).
Предлагаемый конвейер эффективен и надежен в работе. Прикрепление лап и лент к элементам тягового органа упрощает и, следовательно, уменьшает трудоемкость
0
изготовления,монтажа и ремонта конвейера, например, замены лап, замены или передвижки лент, замены поперечин. Кроме того, выполнение лап с закруглениями на передних по ходу движения лент кромок увеличивает срок службы лент. Выполнение конвейера с гибкими перегородками, например изготовленных из тех же бывших в употреблении лент с простым и надежным их креплением, обеспечивает возможность крутонаклонной транспортировки не только крупнокускового, но и мелкокускового сыпучего груза.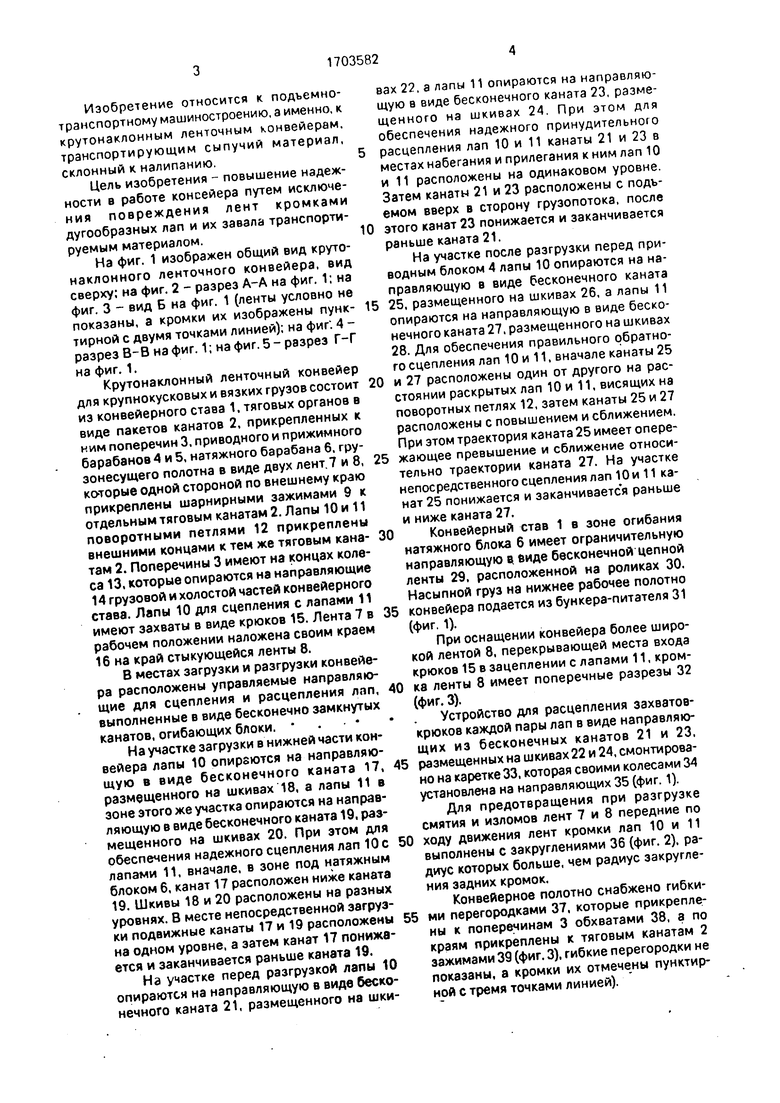
| название | год | авторы | номер документа |
|---|---|---|---|
| Крутонаклонный ленточный конвейер | 1986 |
|
SU1766786A1 |
| САМООЧИЩАЮЩИЙСЯ КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279393C1 |
| Крутонаклонный ленточный конвейер | 1989 |
|
SU1726324A1 |
| Крутонаклонный ленточный конвейер | 1986 |
|
SU1738726A1 |
| Крутонаклонный ленточный конвейер | 1989 |
|
SU1819836A1 |
| Крутонаклонный канатно-пластинчатый конвейер | 1979 |
|
SU870270A1 |
| КРУТОНАКЛОННЫЙ КОНВЕЙЕР | 2003 |
|
RU2238899C1 |
| КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР ДЛЯ КРУПНОКУСКОВЫХ ГРУЗОВ | 2014 |
|
RU2613469C2 |
| ЛЕНТОЧНО-КАНАТНЫЙ КОНВЕЙЕР С ПРОМЕЖУТОЧНЫМИ ПРИВОДАМИ | 2012 |
|
RU2494948C1 |
| КРУТОНАКЛОННЫЙ КОНВЕЙЕР | 2004 |
|
RU2277504C1 |


22
15
11
в
12
12
У
13
12
27
28
РигМ
Ь,,
r-r
Риг. 5
| Авторское свидетельство СССР № 3336478, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Крутонаклонный ленточный конвейер | 1982 |
|
SU1474032A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
