Крегистрирующему Блоку
1зсЛрсте; ме о. ноапсп к лсхгоотех : - ке и мо,х;&т на/.тн.применсния t синхронных 3/)e;-cT;jH ir-r v..: машине/.
l- bneCTHH yC pO/iCTt j Д/ГГ ИЗГ..ереНИЯ И
регистрзцпи угла высота ротор СИНХрО . - НО-Й t.i.r;l Ji :;i :J, СОДСРХЗЛ ИЗ U,fl jr..Cr.T O/ibHl-T:
электрччеслие м;., .15ся по- тенциомотрм. контак. нп ривтсли и другие зл ме;пы.
Однако утим устройствам необходим датчик полохенм ротсрл Р виде- учломор- ной MCituHHL или различного рода контактных электромз; HUTHUX устройств, понижающих Нс :д5 :ч. и точность измерения.
Также 1 ззестно устройство, содор:; а- щеефотоэ .трически-г ,v.чик/, фззо-г/ ст- вительную схему, собранную на Фототранзисторе, а тс-кяе обтюрзюр, дт; которого необходим либо свободный конс-ц взлз, лмГю открытая диступмэя часть пала машины.
Осцил- ЬфзфмроьГги й ) выбега в пэ-, реходких РС;Г; -;МЙХ с ломощмо этого устройства большие запаздывания измерен;-; угла, так ка. устройство ссдор- жмт фильтру.
На;-(5олсо близким к предлагаемому яв- ляетс я д-:;тч-; х положения рслорз, выполненный в оиде катушки- индуктивности дизметрсмб мм / толид-пной 2 t- м, установленных з трех взаимно перпендикулярных плоскостях. Пссле усипспия и кнтсгркровэ- ния cwrivjfl рбгмстрипуется олектростатичэ- ским еольт.-;етром и еиэлизртором гармони::.
Однако этот датчик г;оло:-::о;1ия роторп достзтсчно сложен в настройке, требует строгого со;лдсовс ния параметров специ- .ч Олог.с-: обработки -.лиформсщги, что седет к 1 ;гло:;;-, исмер ис.ям угла положения ротора,
Цель изобретения - повышение точности изгл -релий угяз 1 ыб : га ротирз.
Указанная цель дост; г.зтся тем, что в синхронноЛ электрическоЛ машине с устройством для измерения упгэ ьмбога ротора, содержащей croiop, ротор с о&моткоП, индукционный датчик положения роторз, укрепленный иеподзижно в зоне лобооой части o6 - 3TKi . ротора и подключенный к блоку регистрации, длтчм:с гголожения ротора выполнен в виде дугооорозмою измери- тельнснс проподникэ с длиной, равной полюсному/; -пению чянипны, ti с рлдиусом, раьни.ч ГоЛ-iycy распопе -оинп голопо с лобовых ;::стей обмотки ротопч.
.На шг. I предсгапленп л ктрмчоскзя схема устуойстпэ; ш ф;;г. 2 - ьрепло.ж я п
(юспо/южепия датчика, проекции; на фиг. 3 и 4 -- осциллограммой, поясняющие работу устрийстг.я.
Флзг обмотки 1 статор; (показана одной катушкой), F; цепь ко;орой и::лючен трансформатор 2 напряжения, вторичная оСмотк) которого подключается к зажимам напряжения фазометра 3, а к другим зажимам фазо.-чра 3 плд лючоюгсл пыоодные
конц|.-1 измерительного проноднмка А. рас- полохсеннсго в соне лоСюзой части обмотки 5 ротора, сйсзомэтр 3 разность фаз мг.хду нопрл}:(эни5м фазы обмотки 1 статсрз и ЭДС, индуктируемой потоком рассолн«п сбмотки 5 ротора п измерительном проводнице А. Нг: иь:х6д фазомзтра 3 вклю- ч.оетс;: магш тозлектричг ский приоор 6 или вибрягор 7 осциллографа.
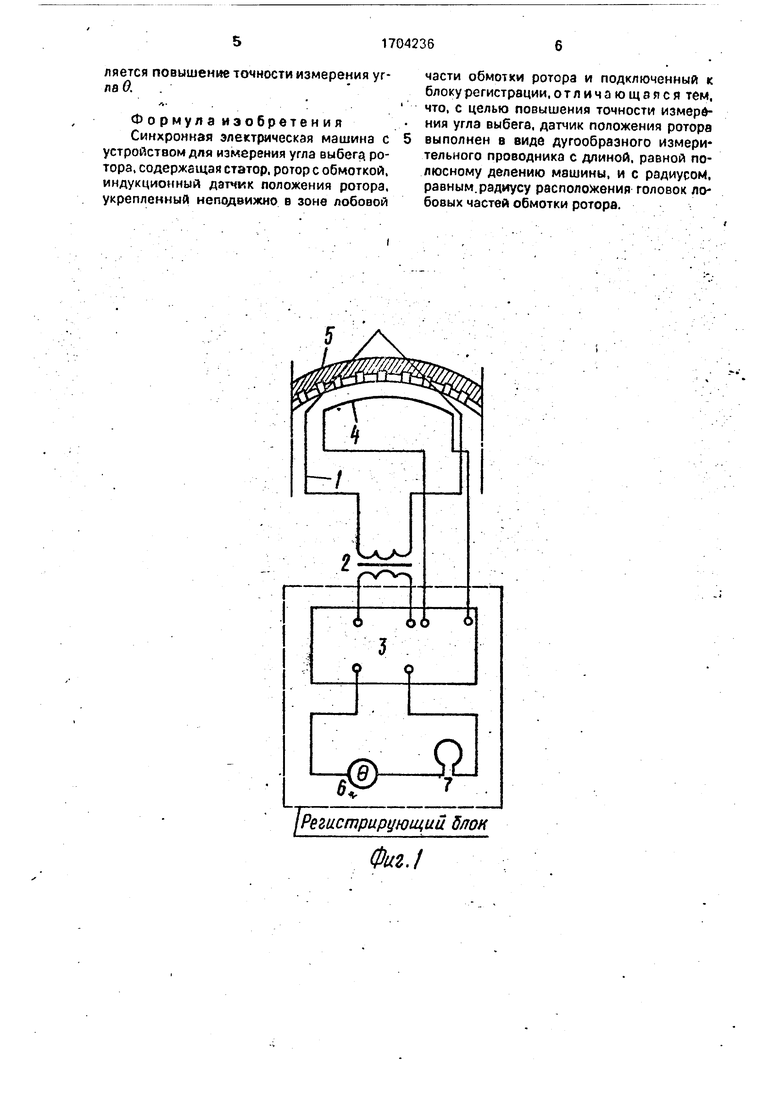
l-Ja фиг. 2 по и ;злны крепления и располо«ения датчика А (измерительный проводник) з двух проекциях. В пода;/.пкооом щите протии лобовой части обмот;;и 5 ротора в ви.п.. , ;уги устонавянсаотся датчик А с длиной, РЛЕНОЙ )му делению, и радиусом, p-, радиусу р;;гполо;кения головок лобовых частей обг- отки 5 рогора.
Датчик работает следующим образом. При ;,)и1цоМ1и возбужденного роторз синхронной машины, работающей параллельно
г, сетью, мзгнитнос поле рассеяния обмотки
5 ротора индуктирует в проводнике А ЭДС,
фаза которой относительно напряжения фазы обмотки 1 статора зависит от углового
положения ротора. Подавая на фазометр 3
i-лпрлжоние фазы обмотки 1 статора и ЭДС проводника 4, на выходе фазометра 3 пол- умпм разность фаз G между ними, т.е. угол иыбсга ротора синхронной машины.
В случае необходимости осциллогрэфирооания угла /выводные концы проводника 4 и 32;KMMhj вторичной обмотки трэнсформа- торэ 2 напряжени могут быть подключены к вибратору осциллографа.
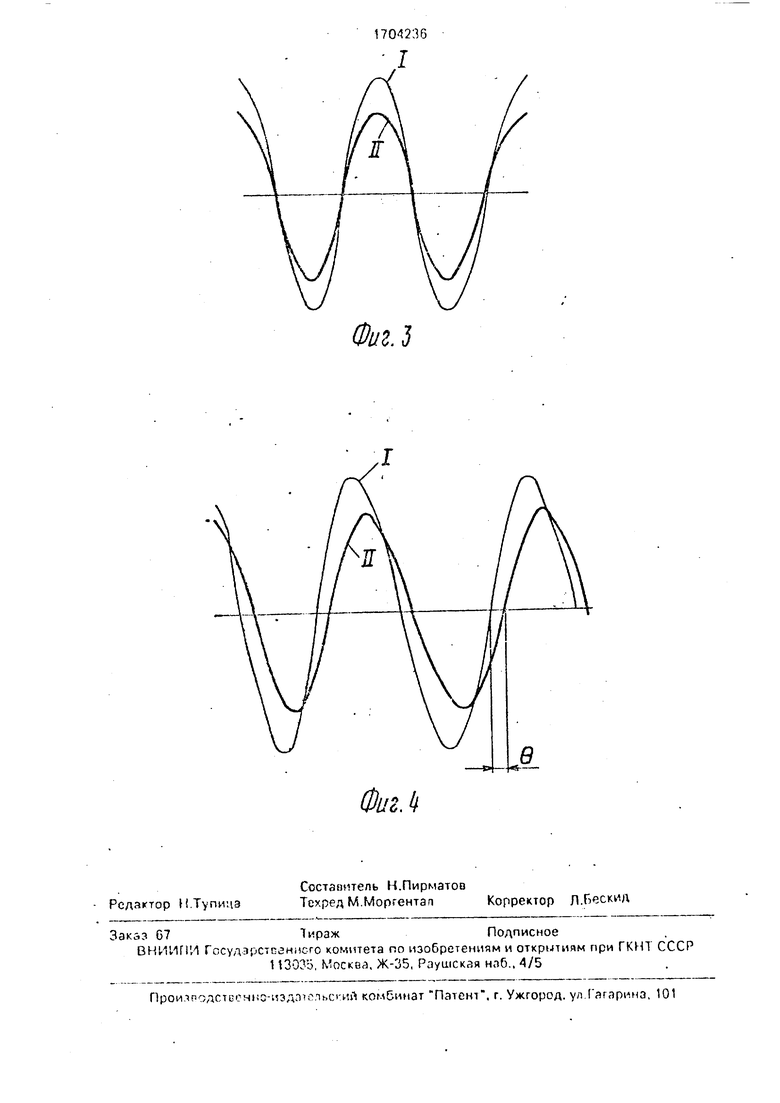
На осциллограмме {фиг. 3) показан угол
5между напряженномХфазы обмотки 1 статора и ЗДС П прпподника 4 при холостом ходе с фазным напряжением 127 В и токе возбуждения If- А А синхронной машины в рс киме гепср.чтора. В зтом режиме
угол . На осциллограмме (фнг. А) показан угол 0выбега роторз мехду напряжением I фазы обмотки 1 статора и ЭДС II проводница А при фазном напряжении Уф1- 126 В, токе розС уждеш:, Jf б Л. токе
статора Ic 11,3 Л и мощности Р 3,1 кВт-. В Э1ч;м режиме угол 0- 19°, .
Экстремальные исслодопанип показы- е-зют, мю npoi MyiJir.. предлагаемого изобретении по ср-;.ненпю с пинестным лоляется повышение точности измерения уг- паО. .
.
Формула изобретения Синхронная электрическая машина с устройством для измерения угла выбега, ротора, содержащая статор, ротор с обмоткой, индукционный датчик положения ротора, укрепленный неподвижно в зоне лобовой
части обмотки ротора и подключенный к блоку регистрации, отличающаяся тем, что, с целью повышения точности измерд- ния угла выбега, датчик положения ротора выполнен в виде дугообразного измерительного проводника с длиной, равной полюсному делению машины, и с радиусом, равным, радиусу расположения головок лобовых частей обмотки ротора.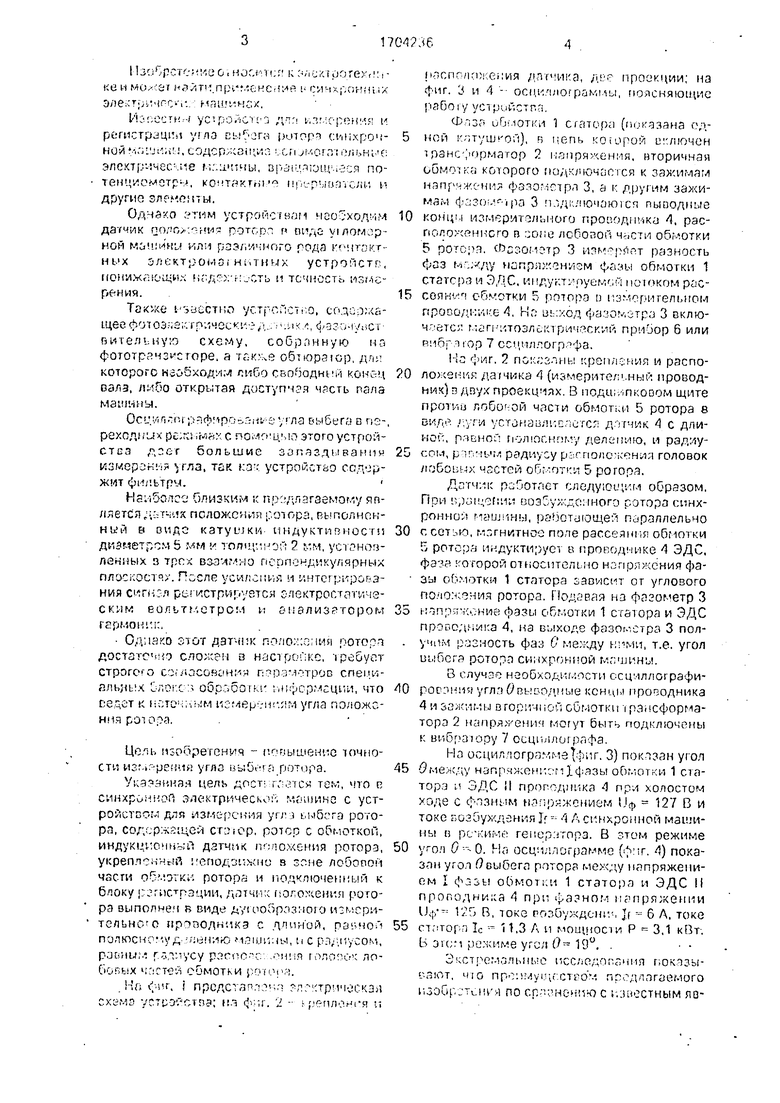
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения и регистрации угла сдвига фаз между током и электродвижущей силой синхронной машины | 1988 |
|
SU1624347A1 |
| Устройство для измерения и регистрации угла нагрузки синхронной машины | 1986 |
|
SU1397849A1 |
| Устройство для измерения индуктивных сопротивлений рассеяния обмотки статора электрической машины | 1981 |
|
SU1120256A1 |
| Трехфазно-однофазная совмещенная обмотка синхронной электрической машины | 1980 |
|
SU888284A1 |
| Синхронная @ -фазная машина с устройством для измерения продольной и поперечной составляющих токов или напряжений | 1980 |
|
SU888325A1 |
| Способ определения индуктивных и активных сопротивлений электрической машины | 1990 |
|
SU1818601A1 |
| Датчик углового положения | 1979 |
|
SU887921A1 |
| Способ определения частотной характеристики проводимости асинхронной машины | 1990 |
|
SU1780062A1 |
| Способ контроля состояния электродвигателей дробилок кормов | 1990 |
|
SU1755038A1 |
| Способ измерения механической постоянной времени синхронного электродвигателя | 1983 |
|
SU1114995A1 |
Изобретение относится к электротехнике. Цель изобретения - повышение точности измерения угла выбега. Синхронная элект1 рическая машина с устройством для измерения угла выбега ротора содержит статор, ротор с обмоткой 5. Индуктивный датчик положения ротора выполнен в виде измерительного проводника 4, установлен неподвижно в зоне лобовой части обмотки 5 ротора. Проводник имеет форму дуги с длиной, равной полюсному делению машины, и с радиусом, равным радиусу расположения головок лобовых частей обмотки ротора. Распределение измерительного проводника по длине лобовой части обмотки ротора приводит к уменьшению высших гармоник в измерительной ЭДС. что повышает точность измерения. 4 ил. fe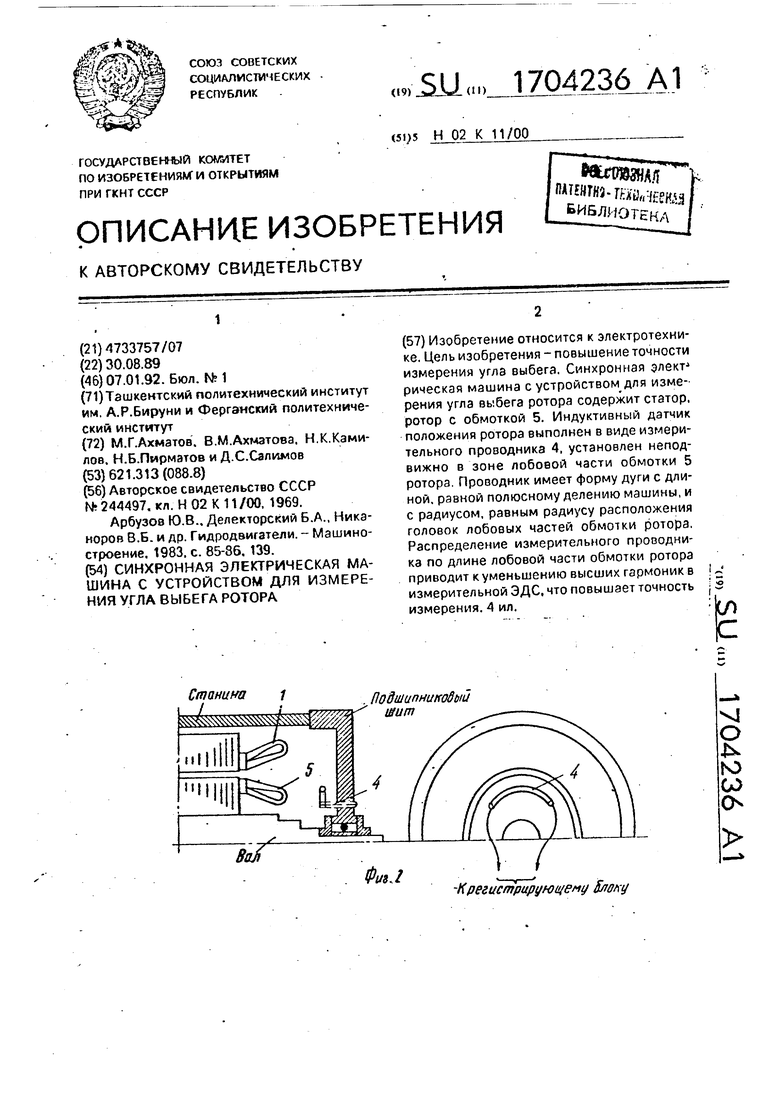
/Регистрирующий блок
Фиг./
| УСТРОЙСТВО для ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ УГЛА УСТОЙЧИВОСТИ СИНХРОННОЙ МАШИНЫ | 0 |
|
SU244497A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Арбузов Ю.В., Делекторский Б.А., Ника- норов В.Б | |||
| и др | |||
| Гидродвигатели | |||
| - Машиностроение | |||
| Гребенчатая передача | 1916 |
|
SU1983A1 |
| с | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Способ подпочвенного орошения с применением труб | 1921 |
|
SU139A1 |
