Область применения
Изобретение относится к транспортному машиностроению, а именно к конструкции колес.
Известен привод колеса транспортного средства, содержащей полую ступицу с установленной внутри лопастью, закрепленной на ведущей оси колеса, и образующего две камеры, которые соединены гидромагистралью со встроенными газогидравлическим аккумулятором, содержащим две диафрагмы и разделенным на три полости, две крайние из которых заполнены жидкостью, а средняя заполнена газом, разделена на две части, давление газа в части, соединенной с камерой заднего хода ниже, чем в другой части (Патент на полезную модель RU № 189123 В60К 17/32. 13.05.2019. Бюл. № 14.) Недостатком данной конструкции является низкая демпфирующая способность привода, обусловленная тем, что он не позволяет мгновенно реагировать на колебания, которые передаются на ведущие колеса, а следовательно и двигатель, со стороны внешних воздействий, так как незначительно влияет на демпфирующие свойства жидкости в полостях ступицы, при этом магистраль обладает постоянным сечением, что влечет за собой возможность резонансных явлений, а это снижает эксплуатационные возможности транспортной машины, то есть снижаются тягово-динамические свойства, надежность, повышается расход топлива двигателем транспортной машины (Поливаев О.И., Иванов В.П. Повышение тягово-динамических свойств мобильных энергетических средств за счет совершенствования приводов ведущих колес: Монография. - М.: РУСАЙНС, 2021 - 184 с.).
Известен также привод ведущего колеса транспортного средства, выбранный в качестве прототипа, включающий полую ступицу с лопастью, закрепленной на ведущей оси колеса, и упора с каналами, соединяющими полости ступицы с полостями газогидравлического аккумулятора, при этом он снабжен управляющим датчиком колебаний крутящего момента, размещенном на валу ведущей оси колеса, электронный сигнал с которого поступает на электронный блок управления и далее на электромагнитные катушки, вмонтированные в упор, посредством которых изменяется вязкость магнитно-реологической жидкости в полости ступицы (патент на полезную модель RU № 203460, B60G 11/18, 06.04.2021. Бюл. № 10).
Недостатком прототипа является ограниченный динамический диапазон регулирования упругих и демпфирующих свойств одним газогидравлическим аккумулятором в широком амплитудно-частотном диапазоне работ транспортного средства. Это приводит к снижению его эксплуатационных возможностей. Кроме того данный привод не позволяет активно изменять поток рабочей жидкости в зависимости от колебаний ведущих колес, так как гидромагистраль обладает постоянным сечением, что влечет за собой возможность возникновения динамических и резонансных нагрузок.
Технический результат-расширение эксплуатационных возможностей транспортного средства за счет расширения динамического диапазона, путем обеспечения оптимального динамического регулирования упругих и демпфирующих свойств активного привода ведущих колес во всех скоростных диапазонах работы транспортной машины. Так как, при резком изменении профиля дороги необходимо мгновенно менять жесткость и демпфирование в приводе ведущих колес, минимизируются при этом уровни колебаний на всех режимах работы.
Технический результат достигается тем, что активный привод ведущего колеса транспортного средства, содержащий полую ступицу с установленной внутри лопастью, закрепленной на ведущей оси колеса, и образующую две полости (прямого и обратного хода) и упорами с каналами, заполненной магнитно-реологической жидкостью, управляющий датчик колебаний крутящего момента, размещенный на валу ведущей оси колеса, сигнал с которого поступает на электронный блок управления и далее на электромагнитные катушки, вмонтированные в упор, посредством которых изменяется вязкость магнитно-реологической жидкости в полости (ступицы, при этом, полости ступицы через управляемые регулируемые дроссели, соединены с газогидроаккумуляторами, полость ступицы прямого хода соединена с двумя газогидроаккумуляторами, а обратного с одним, имеющими различную жесткость и выполненные с возможностью взаимодействия с электронным блоком управления за счет управляемых регулируемых дросселей.
Сущность изобретения заключается в том, что в зависимости от силы поступающего сигнала от датчика колебаний крутящего момента, установленного на ведущей оси колеса, электронный блок управления позволяет регулировать силу тока электромагнитных катушек, изменяя вязкость рабочей жидкости и он синхронно управляет также работой регулируемых дросселей, обеспечивая по заданной программе оптимальное регулирование упругодемпфирующими свойствами приводов ведущих колес. Это приводит к минимуму колебаний при работе транспортной машины в штатном режиме. При возникновении повышенных колебаний на приводе ведущих колес (переезд препятствий, неровности дороги или возникновении резонансных режимов), датчик колебаний крутящего момента, на ведущей оси колеса дает мгновенно команду на электронный блок управления (ЭБУ), где происходит его обработка, и по заданной программе он дает команду на закрытие (или частичное прикрытие) одного из регулируемых дросселей газогидроаккумулятора. Выведение из работы одного из аккумуляторов и включение в работу аккумулятора с большей жесткостью, позволяет мгновенно изменить характеристику подвески. Это в конечном итоге устраняет пробои в приводе и динамические нагрузки, что повышает плавность хода транспортной машины.
Таким образом, установка управляемых, регулируемых дросселей работающих совместно с меняющей вязкость магнитно-реологической жидкостью и двумя газогидравлическими аккумуляторами различной жесткости, позволяет приводу ведущих колес мгновенно активно реагировать на любые изменения колебаний момента сопротивления движению транспортного средства. Это приводит к повышению плавности хода, а, следовательно, дополнительно расширяются эксплуатационные возможности транспортной машины.
При трогании задним ходом моменты на ведущих колесах значительно ниже, по этой причине устанавливается только один газогидроаккумулятор, а регулирование упругодемпфирующими свойствами также зависит от команды датчика колебаний крутящего момента, сигнал которого поступает на ЭБУ, и он управляет работой регулируемого дросселя газогидроаккумулятора.
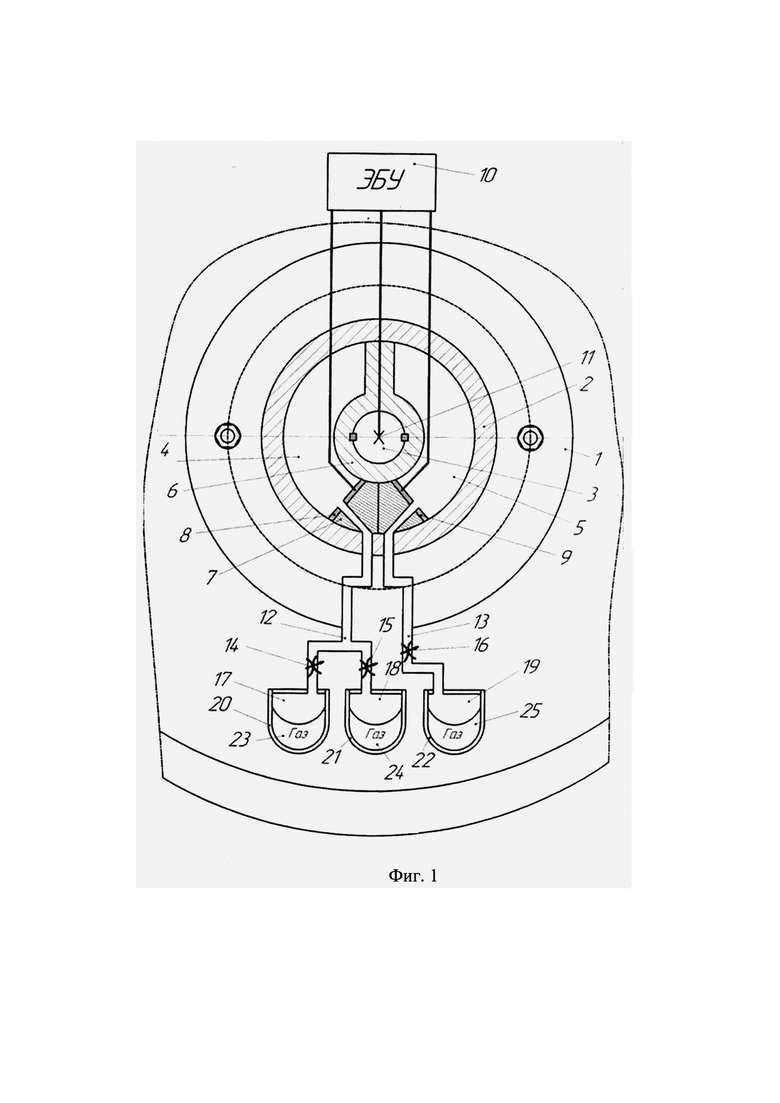
На фиг. 1 представлен общий вид активного привода ведущего колеса транспортного средства, который состоит из диска колеса 1, который жестко соединен со ступицей 2 гидравлического демпфера, установленного при помощи подшипников на ведущей оси 3 колеса и имеющий полость, разделенную лопастью на две части 4 и 5 (прямого и обратного хода). При этом, лопасть 6, упирается в упор 7, в который вмонтированы электромагнитные катушки 8 и 9, связанные с электронным блоком управления (ЭБУ) 10, который получает сигнал от датчика колебаний крутящего момента 11, установленного на ведущей оси 6 или коленчатом валу двигателя. При этом части полости 4 и 5 гидравлического демпфера соединены гидромагистралями 12 и 13 в которых установлены управляемые ЭБУ регулируемые дроссели 14, 15 и 16, которые соответственно соединены с полостями 17, 18 и 19 газогидравлических аккумуляторов 20, 21 и 22. Газогидравлические аккумуляторы 20, 21 и 22 имеют также газовые полости 23, 24 и 25, заполненные сжатым газом под разным давлением.
Активный привод ведущего колеса транспортного средства работает следующим образом.
При движении транспортного средства по неровностям почвы, крутящий момент на ее ведущей оси 3 постоянно колеблется с различной амплитудой и частотой. С учетом этого демпфер привода ведущих колес транспортного средства мгновенно изменяет демпфирующее свойство магнитно-реологической жидкости в зависимости от колебаний крутящего момента на ведущей оси 3, или колебаний коленчатого вала двигателя, который жестко через трансмиссию связан с осью ведущего колеса.
Перед началом трогания транспортной машины к ведущей оси 3 прикладывается крутящий момент и лопасть 6, воздействует на магнитно-реологическую жидкость в части 4 полости (при прямом ходе), направляет ее по магистрали 12, через управляемые ЭБУ регулируемые дроссели 14 и 15 соответственно в полости 17 и 18 газогидроаккумуляторов 20 и 21, сжимая при этом газ в полостях 23 и 24. Синхронно, в зависимости от интенсивности трогания, срабатывает датчик, колебаний крутящего момента 11 на ведущей оси 3, который подает сигнал на электронный блок управления 10 и далее на электромагнитные катушки 8 и 9, что приводит к изменению вязкости магнитно-реологической жидкости, а следовательно, изменению ее демпфирующих свойств в гидравлическом демпфере. Это позволяет тракторному агрегату плавнее трогаться с места без значительного буксования движителей. После окончания трогания и начала разгона, происходит отдача запасенной энергии газогидроаккумуляторов 20 и 21, что приводит к увеличению разгонных свойств тракторного агрегата. При дальнейшем движении, возникающие колебания, передаваемые от движителей, гасятся за счет изменения вязкости магнитно-реологической жидкости в демпфере привода и совместной работе управляемых ЭБУ регулируемых дросселей 14 и 15 совместно с газогидравлическими аккумуляторами 20 и 21.
Проходное сечение управляемых регулируемых дросселей, по заданной программе, изменяется в зависимости от момента сопротивления. При изменении момента сопротивления в прямом и обратном движении, за счет управляемых регулируемых дросселей 14, 15, 16 совместно с изменением вязкости магнитно-реологической жидкости, устраняются динамические и резонансные колебания в приводе ведущих колес, трансмиссии и коленчатом валу двигателя.
При работе с малыми и средними значениями колебаний момента сопротивления на приводе ведущих колес, уровень сигнала с датчика колебаний крутящего момента 11, поступает на ЭБУ-10, где происходит обработка этого сигнала и по заданной программе он воздействует на электромагнитные катушки 8 и 9, а также на регулируемые дроссели 14 и 15, которые управляют потоком магнитно-реологической жидкости, том самым поддерживая оптимально заданную жесткость и демпфирование газогидравлических аккумуляторов 20 и 21.
При возникновении повышенных колебаний в приводе колеса (переезд препятствий, значительные динамические нагрузки или попадание в зону резонанса) с датчика колебаний крутящего момента 11 подается сигнал на ЭБУ-10. Далее этот сигнал с ЭБУ изменяет силу тока в электромагнитных катушках 8 и 9, гидравлического демпфера, а, следовательно, вязкость жидкости. При этом сигнал также с ЭБУ-10, по заданной программе воздействует на регулируемый дроссель 14, закрывая проход жидкости в газогидравлический аккумулятор 20. Таким образом, в работе остается только один газогидравлический аккумулятор 21 с повышенной жесткостью пневмоэлемента 24, а его дроссель 15 регулирует поступление в него рабочей жидкости. Это позволяет резко изменить характеристику привода, устраняя при этом резонансные явления и пробои (т.е. жесткую посадку лопасти 3 на упор 7).
Таким образом, работа управляемых регулируемых дросселей совместно с меняющей вязкость магнитно-реологической жидкостью и двумя газогидравлическими аккумуляторами различной жесткости позволяет приводу ведущих колес активно реагировать на любые изменения колебаний момента сопротивления движению транспортного средства. Это приводит к повышению плавности хода, а, следовательно, дополнительно расширяются эксплуатационные возможности транспортной машины.
При приложении к ведущей оси 3 тормозного момента (или при трогании задним ходом) лопасть 6 воздействует на рабочую жидкость части 5 полости, и рабочая жидкость поступает по магистрали 13 через управляемый ЭБУ регулируемый дроссель 16 в полость 19 газогидроаккумулятора 22. Синхронно, в зависимости от интенсивности приложенного тормозного момента или темпа включения сцепления при заднем ходе, срабатывает датчик колебаний крутящего момента 11, сигнал с которого поступает на ЭБУ 10 и далее на электромагнитные катушки 8 и 9 и регулируемый дроссель 16, при этом сжимается газ в камере 25. Это приводит к изменению упругодемпфирующих свойств привода, а следовательно, устраняет динамические и резонансные колебания. Одновременно магнитно-реологическая жидкость перетекает в часть 4 полости ступицы демпфера за счет давления пневмоэлементов 23 и 24 на полости 17 и 18, заполненные жидкостью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для натяжения гусеничной цепи транспортного средства | 2021 |
|
RU2773132C1 |
| Активная подвеска опорных катков транспортного средства | 2021 |
|
RU2769740C1 |
| ПРИВОД КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2261181C1 |
| Привод колеса транспортного средства | 1984 |
|
SU1175745A1 |
| ПРИВОД КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2396174C1 |
| Подвеска опорных катков транспортного средства | 2020 |
|
RU2750181C1 |
| Привод колеса транспортного средства | 1979 |
|
SU839759A2 |
| Привод ведущего колеса | 1983 |
|
SU1100157A1 |
| Привод колеса транспортного средства | 1985 |
|
SU1281451A1 |
| Привод ведущего колеса транспортного средства | 1985 |
|
SU1240645A1 |
Изобретение относится к транспортному машиностроению. Активный привод колеса транспортного средства включает полую ступицу с лопастью, упоры с каналами, управляющий датчик колебаний крутящего момента, газогидроаккумуляторы. Лопасть закреплена на ведущей оси колеса и образует две полости, прямого и обратного хода. Упоры с каналами соединяют полости ступицы с полостями газогидравлического аккумулятора. Управляющий датчик колебаний крутящего момента размещен на валу ведущей оси колеса. Электронный сигнал с датчика поступает на электронный блок управления и далее на электромагнитные катушки, вмонтированные в упор. Посредством катушек изменяется вязкость магнитно-реологической жидкости в полости ступицы. Полости ступицы через управляемые регулируемые дроссели соединены с газогидроаккумуляторами. Полость ступицы прямого хода соединена с двумя газогидроаккумуляторами, а обратного хода – с одним. Газогидроаккумуляторы имеют различную жесткость и выполнены с возможностью взаимодействия с электронным блоком управления. Достигается повышение эксплуатационных возможностей транспортного средства за счет расширения динамического диапазона. 1 ил.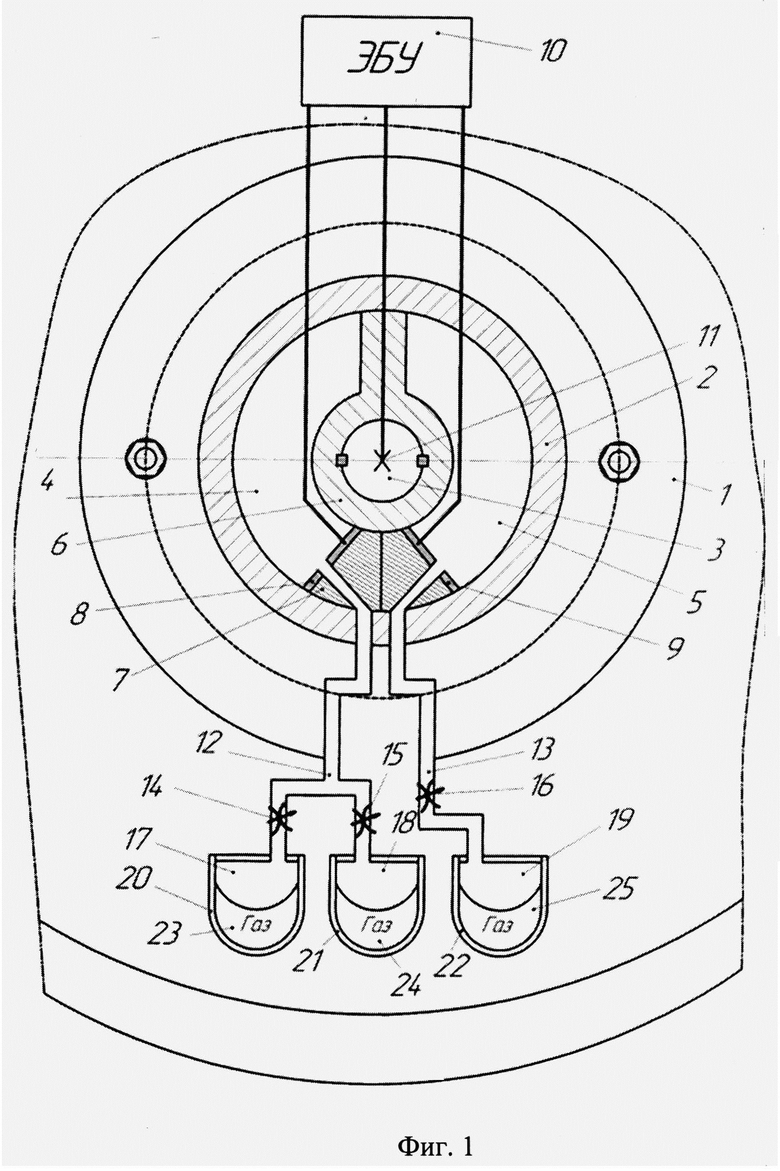
Активный привод колеса транспортного средства, включающий полую ступицу с лопастью, закрепленной на ведущей оси колеса, и образующую две полости, прямого и обратного хода, и упоры с каналами, соединяющими полости ступицы с полостями газогидравлического аккумулятора, управляющий датчик колебаний крутящего момента, размещенный на валу ведущей оси колеса, электронный сигнал с которого поступает на электронный блок управления и далее на электромагнитные катушки, вмонтированные в упор, посредством которых изменяется вязкость магнитно-реологической жидкости в полости ступицы, отличающийся тем, что полости ступицы через управляемые регулируемые дроссели соединены с газогидроаккумуляторами, при этом полость ступицы прямого хода соединена с двумя газогидроаккумуляторами, а обратного хода – с одним, имеющими различную жесткость и выполненные с возможностью взаимодействия с электронным блоком управления.
| 0 |
|
SU203460A1 | |
| ПРИВОД КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2261181C1 |
| 0 |
|
SU189123A1 | |
| Приспособление для укладки и разборки железнодорожных путей звеньями | 1924 |
|
SU1570A1 |
| МОЛОТИЛЬНЫЙ БАРАБАН | 0 |
|
SU400275A1 |

