10 смещается вправо, а золотник 11 удерживается поворотной рамкой на месте за счет гироскопического момента. Это обеспечивает открытие окна 13 и поступление масла под давлением в гидроцилиндры 17 и 18.
Штоки последних выдвигаются и упирают направляющую лыжу в правый борт выработки. При этом исполнительный орган смещается в первоначально заданное положение. 5 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
| Установка для расширения скважин | 1985 |
|
SU1273541A1 |
| Устройство для обработки почвы в садах | 1990 |
|
SU1768013A3 |
| СИСТЕМА КОМПЕНСАЦИИ ПОГРЕШНОСТИ ОБЕСПЕЧЕНИЯ КОВОЧНОГО РАЗМЕРА РАДИАЛЬНО-КОВОЧНОЙ МАШИНЫ | 2003 |
|
RU2241566C2 |
| Гидравлическая система управления погрузочно-транспортной машиной | 1982 |
|
SU1068318A1 |
| Гидравлический привод | 1981 |
|
SU1023152A1 |
| АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО РАБОЧЕГО ОБОРУДОВАНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНОЙ МАШИНЫ | 1992 |
|
RU2012742C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА КОМБАЙНА ШАХТНОГО ПРОХОДЧЕСКОГО | 2006 |
|
RU2324053C1 |
| УСТРОЙСТВО АВАРИЙНОЙ ЗАЩИТЫ ГИДРОТУРБИНЫ | 1997 |
|
RU2171396C2 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ СТВОРОК РАЗДВИЖНОЙ ЧАСТИ КРОВЛИ СТАДИОНА | 2014 |
|
RU2556098C1 |
Изобретение касается автоматического управления горными машинами. Цель изобретения - обеспечение выдерживания направления движения исполнительного органа по направлению забоя. Система автоматического управления содержит за/« // датчик 1 направления движения, исполнительный механизм (ИМ) 2 и установленный на плите 14 гидрораспределитель 10. Задат- чик 1 выполнен в виде гидравлического гироскопа 4, состоящего из гидравлической ковшовой турбины с валом и поворотной рамки. Для размещения вала турбины последняя имеет опоры. Плита 14 соединена с гироскопом посредством кронштейна. ИМ 2 имеет попарно шарнирно соединенные лыжи 15 и 16 и установочные гидроцилиндры 17 и 18, которые выполнены двухшто- ковыми и расположены на раме ИМ 2 параллельно друг другу и перпендикулярно продольной оси исполнительного органа. При отклонении исполнитзльного органа вправо корпус гидрораспределителя Ё XI О vj ЧЭ VI
Изобретение относится к области автоматического управления горными машинами и может быть использовано для автоматического управления направлением движения исполнительного органа угледобывающей установки для безлюдной выемки в условиях гидрошахт.
Цель изобретения - обеспечение выдерживания направления движения исполнительного органа по направлению забоя.
На фиг. 1 изображена система автоматического управления, гидрокинематическая схема; на фиг. 2 - то же, монтажная схема; на фиг. 3 - гидравлический гироскоп; на фиг. 4 - разрез А-А на фиг. 3; на фиг. 5 - разрез Б-Б на фиг. 3.
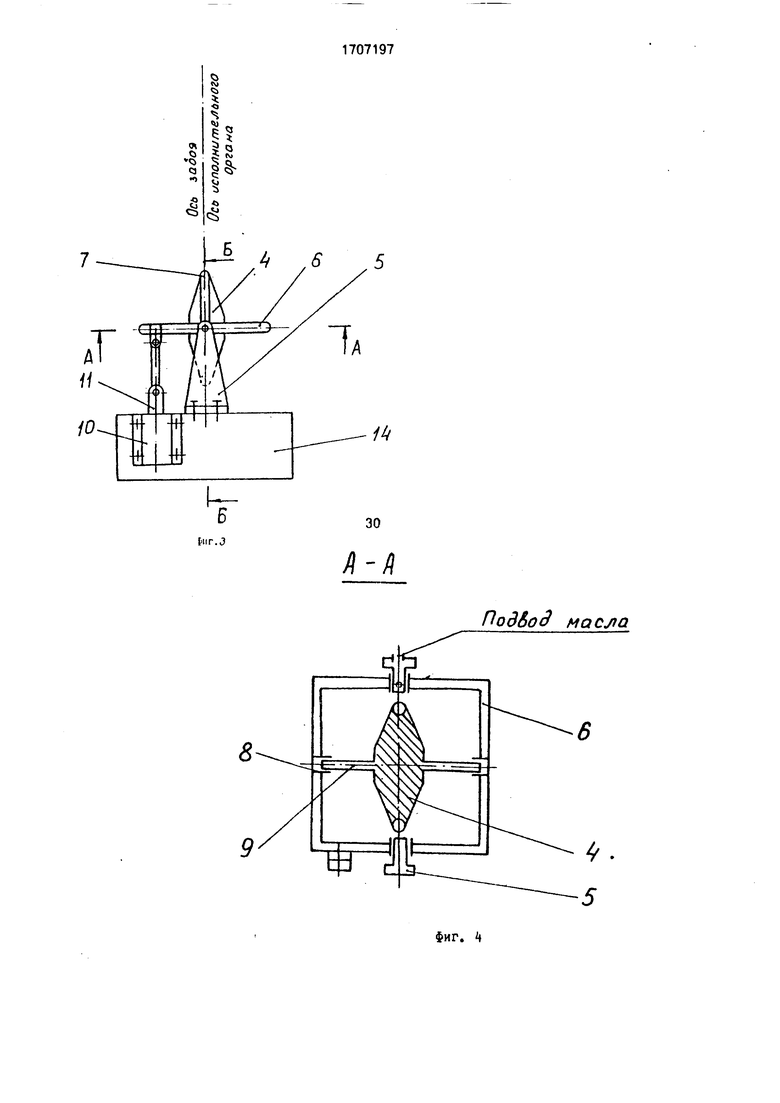
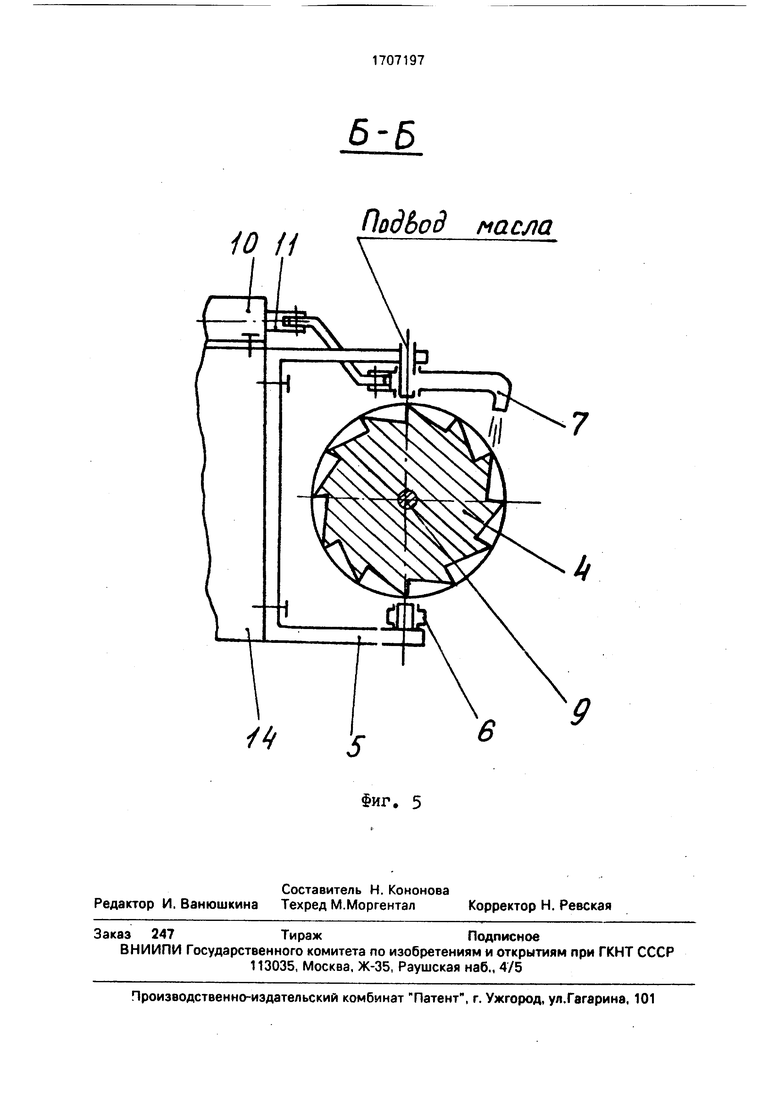
Система автоматического управления состоит из задатчика 1 направления движения и исполнительного механизма 2, запи- танных от маслостанции 3. Задатчик направления движения имеет гидравлический гироскоп 4, выполненный в виде ковшовой гидравлической турбины, кронштейн 5, поворотную рамку 6 с соплом 7 и опорами 8, вал 9, дросселирующий гидрораспределитель 10с золотником 11 и окнами 12 и 13 и плиту 14.
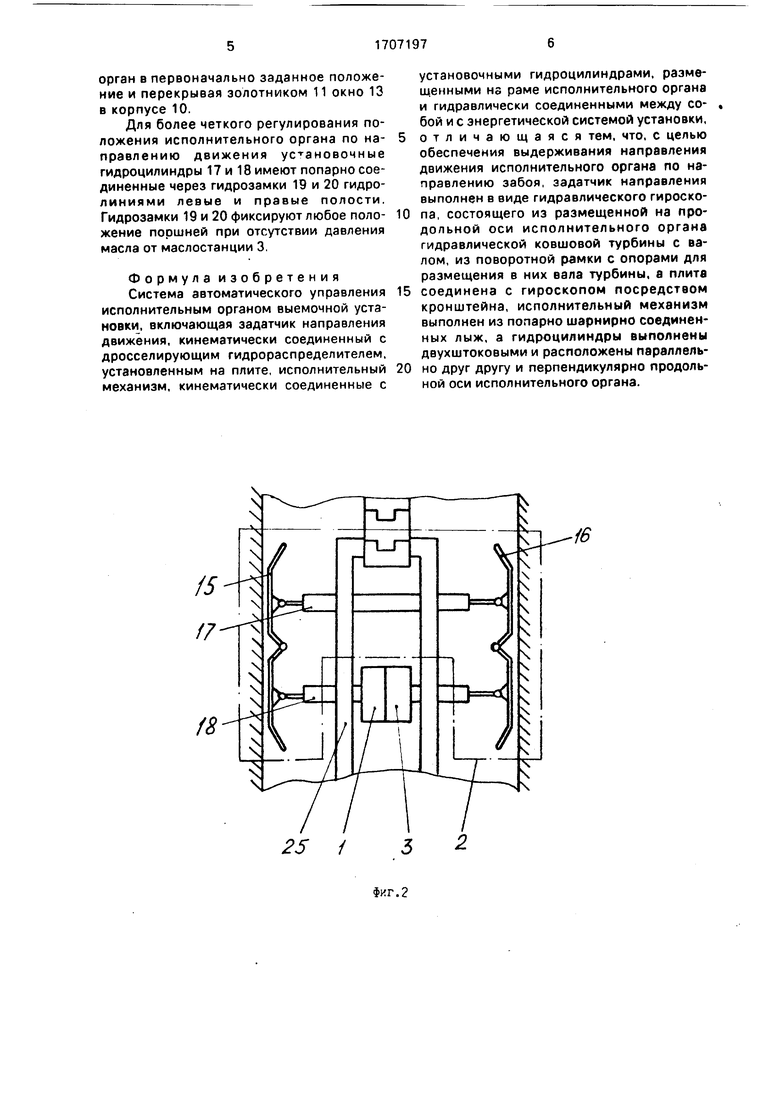
Исполнительный механизм 2 имеет направляющие лыжи 15 и 16. установочные гидроцилиндры 17 и 16, гидравлически соединенные через гидрозамки 19 и 20 гидролиниями 21 и 22 с задатчиком 1 направления движения и маслостанцией 3 гидролиниями 23 и 24. Маслостанция 3 приводится от давления технологической воды, подаваемой по подающему двухлинейному ставу 25, осуществляя постоянную подачу давления масла по гидролинии 23 к дросселирующему гидрораспределителю 10 и далее к установочным гидроцилиндрам 17 и 18 и гидравлическому гироскопу 4.
Гидравлический гироскоп 4 предназначен для выдерживания за счет гироскопического момента направления движения исполнительного органа по направлению забоя с помощью дросселирующего гидрораспределителя 10, установочных гидроцилиндров 17 и 18, направляющих лыж 15 и 16. Гироскоп настраивается по направлению забоя еще до зарубки исполнительного органа в забой. Гироскопический момент создается за счет скорости вращения ковшовой гидравлической турбины, приводящейся струей масла, выходящей под давлением из
сопла 7.
Работа системы автоматического управления происходит следующим образом.
При совпадении направления движения исполнительного органа с заданным при
настройке направлением золотник 11 дросселирующего гидрораспределитвля 10 находится в нейтральном положении, а поршни установочных гидроцилиндров 17 и 18 находятся в среднем положении по
ходу. При отклонении исполнительного органа, например, влево вместе с его рамой отклоняется влево и жестко закрепленная на его раме плита 14 гидравлического гироскопа 4, а вместе с ней и кронштейн 5 с
корпусом дросселирующего гидрораспределителя 10. Золотник 11 удерживается поворотной рамкой б в прежнем положении за счет гироскопического момента, созданного гидравлическим гироскопом 4. Такое отклонение исполнительного органа, а вместе с ним и корпуса дросселирующего гидрораспределителя 10 открывает при неподвижном золотнике 11 окно 12, и давление масла по гидролиниям 23 и 21 и через гидрозамки
19 и 20 поступает в правые полости установочных гидроцилиндров 17 и 18, штоки их выдвигаются и упирают лыжу 15 в левый борт выработки, смещая исполнительный орган в первоначально заданное положение
и перекрывая золотником 11 окно 12 в корпусе 10.
При отклонении исполнительного органа вправо корпус дросселирующего гидрораспределителя 10 смещается вправо, а
золстник 11 удерживается поворотной рамкой 6 на месте за счет гироскопического момента. Такое отклонение исполнительного органа, а вместе с ним и корпуса 10 дросселирующего гидрораспределителя
открывает при неподвижном золотнике 11 окно 13. и давление масла по гидоолинии 23 и 22 и через гидрозамки 19 и 20 поступает в левые полости установочных гидроцилиндров 17 и 18, штоки их выдвигаются и
упирают направляющую лыжу 16 в правый борт выработки, смещая исполнительный
орган в первоначально заданное положение и перекрывая золотником 11 окно 13 в корпусе 10.
Для более четкого регулирования положения исполнительного органа по на- правлению движения установочные гидроцилиндры 17 и 18 имеют попарно соединенные через гидрозамки 19 и 20 гидролиниями левые и правые полости. Гидрозамки 19 и 20 фиксируют любое поло- жение поршней при отсутствии давления масла от маслостанции 3.
Формула изобретения Система автоматического управления исполнительным органом выемочной установки, включающая задатчик направления движения, кинематически соединенный с дросселирующим гидрораспределителем, установленным на плите, исполнительный механизм, кинематически соединенные с
/8
установочными гидроцилиндрами, размещенными нз раме исполнительного органа и гидравлически соединенными между собой и с энергетической системой установки, отличающаяся тем, что, с целью обеспечения выдерживания направления движения исполнительного органа по направлению забоя, задатчик направления выполнен в виде гидравлического гироскопа, состоящего из размещенной на продольной оси исполнительного органа гидравлической ковшовой турбины с валом, из поворотной рамки с опорами для размещения в них вала турбины, а плите соединена с гироскопом посредством кронштейна, исполнительный механизм выполнен из попарно шарнирно соединенных лыж, а гидроцилиндры выполнены двухштоковыми и расположены параллельно друг другу и перпендикулярно продольной оси исполнительного органа.
Ц 3
о 3
Ягг.,3
30
А-А
ПоВбод масла
фиг.
5-6
10 //
/4
ПодЬод масла
| Устройство автоматического управления исполнительным органом очистного комбайна по гипсометрии пласта | 1984 |
|
SU1245701A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
