Изобретение относится к землеройным машинам и может быть использовано при разработке грунтов, например при возведении земляного полотна лесовозных дорог и
т.д.
Известен экскаватор для разработки малых, плотных и мерзлых грунтов, включающий связанную с базовой машиной стрелу, рукоять и ковш.
Наиболее близким техническим решением является рабочий орган, включающий траверсу с ковшом, содержащим режущее кольцо с приводом, а боковые раздвижные рамы выполнены с раздвижным днищем и приводом раздвижных стенок.
Однако такой рабочий орган неуниверсален, т.е. не может работать в режиме прямой и обратной лопаты, хотя он металлоемок за
счет наличия гидроцилиндров, приводов и т.д.
Целью изобретения является повышение производительности и расширение технологических возможностей.
Поставленная цель достигается тем. что рабочий орган зкскаватора имеет боковые режущие плоскости, выполненные в виде двух боковых стенок с заостренной кромкой, с внутренней стороны которых выполнены парные кольцевые пазы для размещения в них челюстей из листового металла, при этом боковые режущие плоскости в верхней части соединены между собой рамой, на которой установлены реверсивные приводы, связанные посредством цепной передачи с валами, на которые насажены приводные звездочки, установленные в зацеплении с челюстями посредством взаимодействия зубьев звездочек с отверстиями в челюстях.
На чертеже показан рабочий орган.
Рабочий орган включает боковые режущие плоскости 1. которые выполнены в виде двух боковых стенок с заостренной кромкой. С внутренней стороны боковых режущих плоскостей 1 выполнены кольцевые пазы 2, в которых находятся челюсти 3, выполненные из листового металла. Боковые режущие плоскости 1 в верхней части соединены между собой рамой 4.
На раме 4 установлены реверсивные приводы 5, связанные посредством цепной передачи 6 с валами 7. На валах 7 насажены приводные звездочки 8, установленные в зацеплении с челюстями 3 посредством взаимодействия зубьев звездочек 8 с отверстиями 9.
Рабочий орган экскаватора работает следующим образом.
Экскаватор подъезжает к забою и с помощью стрелы, рукояти и рамы 4 в грунт заглубляются режущие плоскости 1. Челюсти 3 в момент заглубления режущих плоскостей 1 находятся в верхнем положении. Параллельное размещение кольцевых пазов 2 позволяет челюстям 3 заходить друг на друга.
На челюстях 3 имеются вырезы для прохождения челюстей через приводные звездочки 8. находящиеся на противоположной стороне.
После заглубления режущих плоскостей 1 в грунт включаются реверсивные приводы 5. Движение посредством цепной передачи 6 передается на валы 7, а соответственно и на приводные звездочки 8. Приводные звездочки 8 своими зубьями входят в зацепление с отверстиями 9 челюстей 3 и при вращении перемещают их по кольцевым пазам 2, образуя при этом замкнутый
контур. При блокировке грунта челюсти 3 выполняют роль режущего элемента. После смыкания челюстей 3 с помощью стрелы и рукояти рабочий орган подводится к месту
выгрузки. Включаются реверсивные приводы 5 и крутящий момент посредством цепной передачи 6 передается на валы 7, а соответственно и на приводные звездочки 8, которые возвращают челюсти 3 в исходное положение, т.е. идет разгрузка рабочего органа экскаватора. Затем цикл повторяется.
Конструкция рабочего органа позволяет экскаватору работать как прямой, так и обратной лопатой без замены сменного оборудования.
Формула изобретения
1.Рабочее оборудование одноковшового экскаватора, включающее стрелу и соединенную с ней рукоять с рамой, на которой подвижно закреплен двухчелюстной ковш, отличающееся тем. что. с целью повышения производительности и расширения технологических возможностей экскаватора, рама выполнена с двумя неподвижными боковыми стенками с режущими кромками, причем на внутренних поверхностях боковых стенок выполнены
парные кольцевые пазы, а челюсти ковша выполнены поворотными и установлены своими торцами подвижно в кольдевых пазах боковых стенок, при этом рама снабжена реверсивными приводами, установленными с
возможностью взаимодействия с поворотными челюстями.
2.Оборудование по п. 1 .о т л и ч а ю щ ее с я тем, что поворотные челюсти выполнены с рядами отверстий, а боковые стенки
имеют приводные валы со звездочками, установленными с возможностью взаимодействия с отверстиями поворотных челюстей и реверсивными приводами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКСКАВАЦИИ ГРУНТА ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2032029C1 |
| Рабочее оборудование одноковшового гидравлического экскаватора | 1989 |
|
SU1765315A1 |
| Рабочий орган гидравлического экскаватора | 1989 |
|
SU1738930A1 |
| Рабочий орган цепного траншейного экскаватора | 1990 |
|
SU1712542A1 |
| Траншейный экскаватор | 1983 |
|
SU1121362A1 |
| Рабочее оборудование роторного экскаватора с инерционной разгрузкой | 1990 |
|
SU1754849A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА-ПЛАНИРОВЩИКА | 1967 |
|
SU222975A1 |
| Рабочее оборудование гидравлического экскаватора | 1982 |
|
SU1077988A1 |
| УНИВЕРСАЛЬНОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 2022 |
|
RU2783447C1 |
| Экскаватор | 1989 |
|
SU1680881A1 |
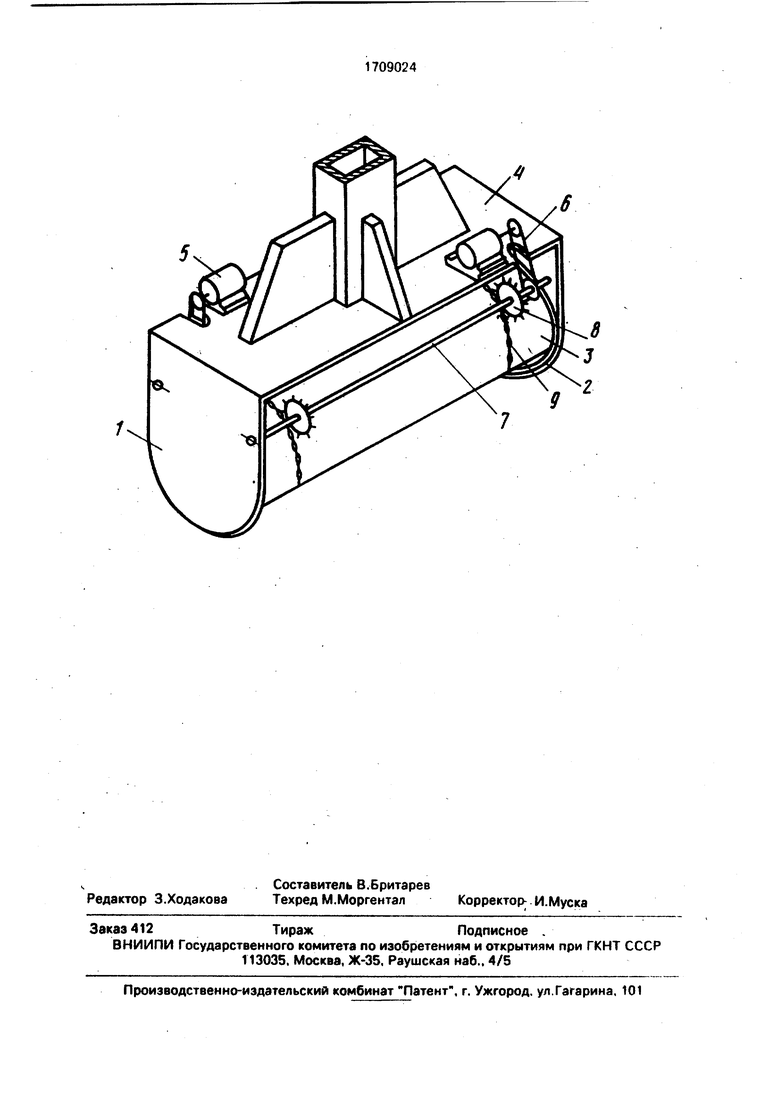
Изобретение относится к землеройным машинам для разработки малопрочных грунт'ов в ирригационном и лесотехническом производстве. Цель - повышение про- изв-сти и расширение технологическихвозможностей экскаваторов. Рабочее оборудование содержит стрелу, рукоять и раму 4 с боковыми стенками (БС) 1. которые имеют на своих внутренних поверхностях парные кольцевые пазы 2. Челюсти 3 ковша выполнены поворотными и своими торцами подвижно установлены в кольцевых пазах 2 БС 1. На раме установлены реверсивные приводы 5. которые цепными передатчиками 6 соединены с ведомыми валами 7. на которых звездочки 8 установлены с возможностью взаимодействия с челюстями 3. При работе зкскаватора БС 1 заглубляются в грунт и затем приводятся в действие челюсти 3 ковша, которые вырезают грунт. Разгрузка ковша осуществляется раскрытием челюстей 3. 1 з.п. ф-лы. 1 ил.у^
| Ковш экскаватора | 1972 |
|
SU534552A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
