Изобретение относится к электротехнике ч может быть применено в тиристорных электроприводах.
Целью изобретения, является повышение помехоустойчивости электропривода.
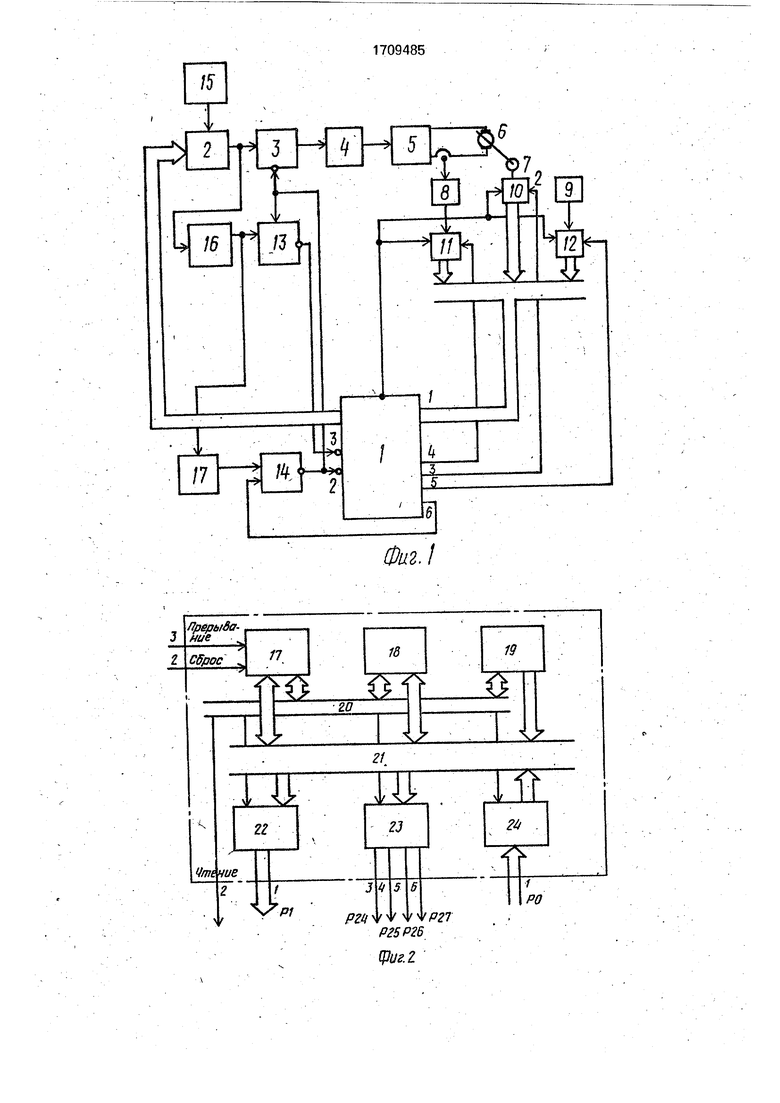
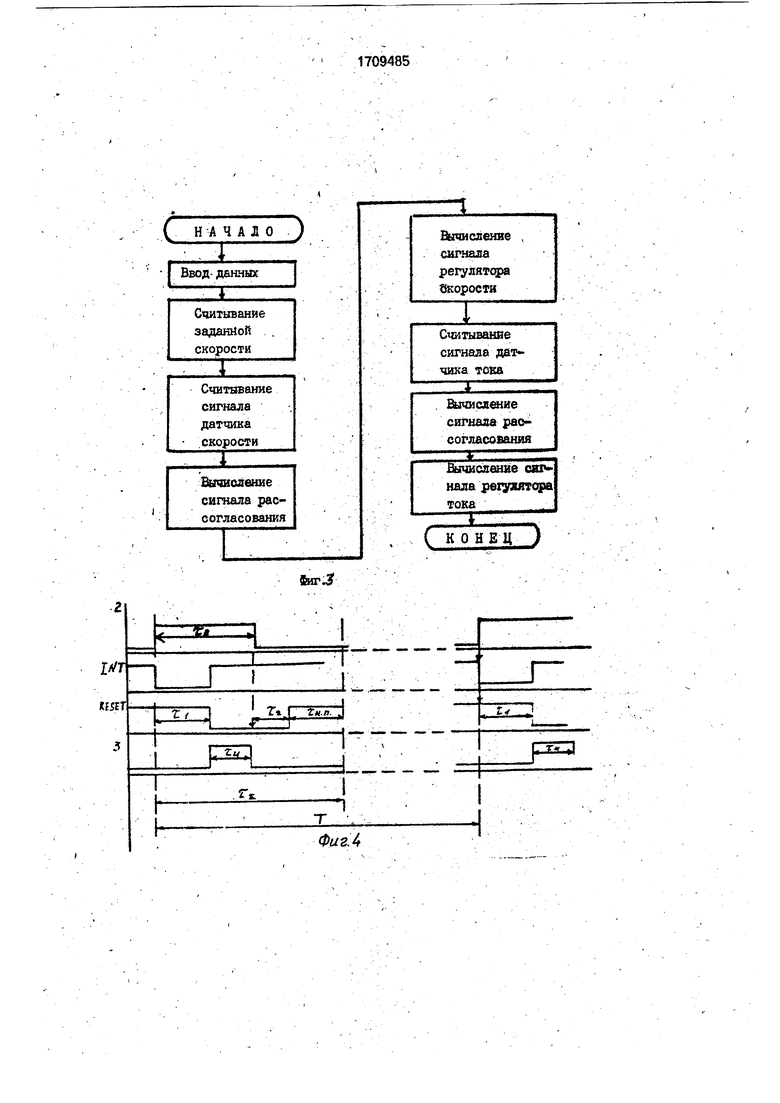
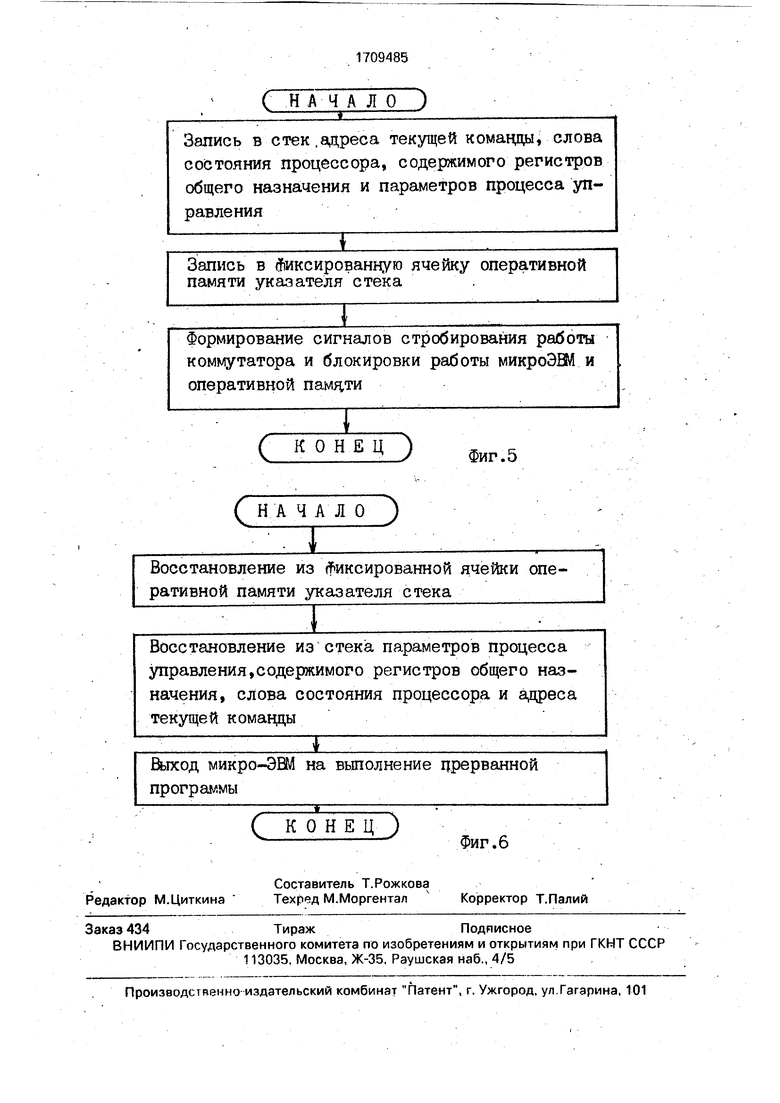
На фиг.1 изображен электропривод; на фиг.2 - цифровой регулятор скорости и тока; на фиг.З - алгоритм регулирования скорости и тока; на фиг.4 - временная диаграмма работы электропривода;:На фиг. б алгоритм обработки прерывания; на фиг.6 - алгоритм выполнения программы начального пуска.
Электропривод содержит Последовательно соединенные цифровой регулятор 1 скорости и тока, блок 2 импульсно-фазового управления, коммутатор 3, блок 4 гальванической разв;4зки, .управляемый выпрям Чтель 5 и электродвигатель 6.
Датчики 7 и 8 скорости и тока и задатчик 9 скорости подключены соответственно к первому, второму и третьему аналого-цифровым преобразователям 10, 11 и 12, выходы которых через магистраль подключены к первому входу цифрового регулятора 1 скорости и тока, второй выход которого соединен, с первыми стробирующими входами аналого-цифровых преобразователей 10,11 и 12. Вторые стробирующие входы аналогоцифровых преобразователей 10,11 и 12 подключены к третьему, четвертому, пятому выходам цифрового регулятора 1 скорости и тока. Третий вход цифрового регулятора 1 соединен с выходом первого элемента ИНЕ 13, второй вход-с выходом второго элемента И-НЕ 14, с вторым входом первого элемента И-НЕ 13 и с управляющим входом коммутатора 3, а шестой выход цифрового регулятора 1-е вторым входом второго логического эпеменга 14. Вход синхронизации блока 2 импульсно-фазового управления подключен к трансформатору; 15, а выход - к входам элемента ИЛИ 16, соединенного с первым входом первого элемента И-НЕ 13 и через формирователь 17 - с первым входом второго элемента И-НЕ 14. Цифровой регулятор 1 скорости и тока может быть выполнен известным способом, например в виде однокристалльной ми|фоЭВМ (фиг.2), содержащей центральный Ироцессор 17, оперативное и постоянное запоминающие устройства 18 и 19, подключенные к магистрали 20 управления и к магистрали 21 адреса и данных, первый и второй порты 22 и 23 вывода и порт 24 ввода, соединенные с магистралями 20и 21, входы Прерывание и Сброс подключены к центральному процессс ру 1-7, а выход Чтение - к магистрали 20;
Первый выход цифрового регулятора 1 это порт 22 вывода Р1, второй выход - выход Чтение, третий, четвертый, пятый и шеетой выходы - разряды Р24 - 27 порта 23 вывода Р2, первый вход - порт 24 ввода РО, второй вход - вход Сброс, а третий вход вход Прерывание.
Центральный процессор .17 может быть выполнен в виде арифметико-логического устройства, управляющей памяти, схемы управления вводом-выводом, регистров общего назначения, схемы нанального пуска, контроллера прерывания и генератора тактовых импульсов и связей между ними.
Оперативное запоминающее устройство 18 может быть выполнено известным способом, например на основе статических триггерных ячеек. Постоянное запоминающее устройство 19 может быть выполнено известным способом на основе БИС ПЗУ. Порты 22 - 24 могут быть выполнены известным способом на основе регистров с параллельной записью и шинных формирователей. Магистрали 20 - 21 выполняются в виде проводных линий связи.
Электропривод работает следующим образом.
. В исходном состоянии на втором выходе, втором и третьем входах регулятора 1 - высокий уровень потенциала, на остальных входах и выходах регулятора 1 низкий, уровень потейциаДа. Сигнал, пропорциональный заданной скорости, поступает с задатчика 9 скорости на вход аналого-цифрового преобразователя 12, на второй стробирующий вход которого подается разрешение на выдачу информации с пятого выхода цифрового регулятора 1 (разряд Р2 6 порта,Р2), а на первый стробирующий вход - сигнал чтения информации с второго выхода регулятора 1 (порт Чтение). Выходной код аналого-цифрового п| еобразователя 12 по стробирующим сигналам поступает через магистраль на первый вход регулятора 1 (порт РО). Сигналы Датчиков 7 и 8 скорости и. тока аналогичным образом поступают через аналого-цифровые преобразователи 10 и 11 по стробирующим сигналам с третьего и четвертого выходов регулятора 1 (разряды Р24 и Р25) и сигналу Чтение на первый вход регулятора 1 ,(пЬрт РО). Ввод данных в цифровой регулятор 1 скорости-и тока производится программно. Алгоритм регулирования скорости и тока, реализуемый цифровым регулятором 1, представлен на фиг.З. Код управления с первого выхода регулятора 1 (порт Р1) поступает в блок 2 импульсно-фа зового управления, на второй вход которого с трансформатора 15 подаются сигналы для синхронизации с сетью. В результате на выходах блока 2 импульсно-фазового управления формируются импульсы управления, управляемым выпрямителем 5 (фиг.4). Эти импульсы поступают на входы коммутатора 3 и элемента ИЛИ 16. Выходной сигнал элеMeHta ИЛИ 16 подается на входы элемента 13 и формирователя 17. При этом на выходе элемента 14 - сигнал высокого уровня (шестой выход регулятора 1 - нуль, выход формирователя 17 - единица) на выходе элемента 13 - сигнал низкого уровня, воздействующий на третий вход регулятора 1 (вход Прерывание) и инициирующий регулятор 1 к выполнению программы прерывания по алгоритму, представленному на фиг.5. Через время п , затраченное на обработку программы прерывания, регулятор 1 на шестом выходе (порт Р27) формирует сигнал высокого уровь1я, который вместе с сигналом высокого уровня, поступающим через формирователь 17, устанавливает на выходе второго элемента И-НЕ 14 низкий потенциал, воздействующий на второй вход регулятора 1 (вход Сброс) и блокирующий микроэвм. Одновременно сигнал с выхода элемента 14, воздействуя на элемент 13, устанавливает на третьем входе регулятора 1 (вход Прерывание) высокий уровень потенциала, снимая режим прерывания. Этот же сигнал включает коммутатор 3 и сигналы с его выхода передаются через блок 4 на управляющие электроды тиристоров управляемого выпрямителя 5, Управление тиристорами осуществляется импульсами 7и и (фиг. 4), происходит коммутация тиристоров, при этом возникает мощная импульсная п6меха, но так как микроЭВМ заблокирована, то сбоев в ее работе не происходит. По окончании действия выходного импульса Гс блока импульсно-фазового управления выходной сигнал низкого уровня с выхода логического элемента 16 поступает на вход формирователя 17 и появляется с заде ржкой TI на его выходе, устанавливая тем самым на выходе логического элемента 14 сигнал высокого уровня, т.е. регулятор 1 разблокируется. Суммарное время Ти +т|г, пока микроэвм заблокирована, выбирается большим времени действия коммутационной помехи тиристоров. После прекращения блокировки регулятор 1 приступает к выполнению программы начального пуска в соответствии с алгоритмом, представленным на фиг.б. 1УЛикроЭВМ продолжает выполнение программы управления до появления следующего импульса на выходе системы 2 импульсно-фазоврго управления. Этот процесс повторяется в течение каждого цикла коммутации. Ошибка в формировании заданного угла управления тиристорами управляемого выпрямителя 5, обусловленная задержкой . .коммутации на время ri , компенсируется за счет постоянного опережающего фазового сдвига синхронизации при формировании импульсов блока 2 импульсно-фазового управления. При .этом импульсы на выходе блока 2 импульсно-фазЪвого управления появляются с упреждением на время, равное П. Таким образом, перевод цифрового регулятора скорости и тока, выполненного на микроэвм, в режим прерывания и его блокировка по-ймпульсам блока 2 импульсхофазового управления на .время дейстЫя помехи, вызываемой коммутацией тиристоров, повышает помехоустойчивость электропривода., Формула изобретения Цифровой электропривод постоянного трка, содержащий электродвигатель, якорная обмотка которого подключена к выходу управляемого выпрямителя, последовател. но соединенные цифровой регулятор скорости и тока к блок импульсно-фазового управления, блок гальванической развязки, выходом подключенный к входу управляемого выпрямителя, датчик скорости, датчик якорного тока и задатчик скорости, выходы которых подключены соответственно к пер-вому, второму и третьему аналого-цифровом преобразователям, выходы которых через магистраль данных подключены к первому входу цифрового регулятора скорости и тока, второй выход которого соединен с первымй стробирующими входами аналого-цифровых преобразователей, вторые стробирующие входы которых подключены соответственно к третьему, четвертому и пятому выходам цифрового регулятора скорости и тока, вход ринхронизации блока имп ульсно-фазового управления соединен с вторичной обмоткой трансформатора, первичная обмотка которого соединена с выводами, предназначенными для подключения к источнику питания, отличающийся reiM, что, с целью повышения помехоустойчивости, в него введены коммутатор, два логический элемента И-НЕ, формирователь импульсов и логический элемент ИЛИ, входом подключенный к выходу блока импульсно-фазового управления, а выходом - к первому входу первого логического элемента И-НЕ и к входу формирователя импульсов, выход которого соединен с первым входом второго логического элемента И-НЕ, выход которого соединен с вторым входом цифрового регулятора скорости и тока, вторым входом первого логического элемента И-НЕ и с управляющим входом коммутатора, подключенным между выходом блока импульсно-фазового управления и блоком гальванической развязки, второй вход второго логического элемента И-НЕ соединен с шестым выходом цифрового регулятора скорости и тока, третий вход которого соединен, с выходом первого логического элемента ИтНЕ.
Фиг. I
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ МНОГОДВИГАТЕЛЬНОГО ЭЛЕКТРОПРИВОДА | 1992 |
|
RU2071635C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |
| Дискретно-цифровой электропривод | 1985 |
|
SU1350800A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1991 |
|
RU2077415C1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ДИАГНОСТИРОВАНИЯ РЕЛЕЙНОЙ ЗАЩИТЫ | 1988 |
|
RU1769629C |
| Электропривод постоянного тока | 1983 |
|
SU1259458A1 |
| Устройство регулирования электрической мощности переменного тока | 1991 |
|
SU1830523A1 |
| Способ стабилизации толщины изоляции кабеля и устройство для его реализации | 1982 |
|
SU1302248A1 |
| Устройство для автоматического регулирования температуры | 1988 |
|
SU1645945A1 |
| Цифровое устройство для управления машиной непрерывного литья заготовок | 1989 |
|
SU1632621A1 |
Изобретение относится к электротехнике и может быть применено в тиристорных электроприводах. Целью изобретения является повышение помехоустойчивости электропривода. Электропривод содержит цифровой регулятор скорости и тока, выполненный на базе микроэвм, блок, импульс- но-фа;зового управления, коммутатор. При коммутации тиристоров управляемого выпрямителя возникает мощная импульсная помеха, но так как за счет введенного коммутатора, элементов ИЛИ, И-НЕ и соответствующего алгоритма управления микроЭВМ заблокирована, то сбоев в работе электропривода не происходит. 6 ил.слс
| Башарин А.В., Новиков В.А., Соколов* ский Г.Г | |||
| Управление электроприводами | |||
| Л.: Энергоиздат, 1982, С.59 | |||
| рис | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Тиристорные электроприводы постоянного тока | |||
| М.: Энергоатомиздат | |||
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| Мяльно-трепальный станок для обработки тресты лубовых растений | 1922 |
|
SU200A1 |
