И,
7-#
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ПРОИЗВОЛЬНО ОРИЕНТИРОВАННЫМ В ПРОСТРАНСТВЕ ПОВЕРХНОСТЯМ | 1992 |
|
RU2042558C1 |
| Захватное устройство | 1988 |
|
SU1549893A1 |
| МОБИЛЬНЫЙ ШАГАЮЩИЙ РОБОТ | 1992 |
|
RU2057046C1 |
| Захватное устройство | 1988 |
|
SU1588932A1 |
| Вакуумное захватное устройство | 1990 |
|
SU1796580A1 |
| ПНЕВМАТИЧЕСКИЙ ИСКРОВОЙ СИГНАЛИЗАТОР ВЗРЫВООПАСНОСТИ | 1991 |
|
RU2018964C1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| Экспериментальный стенд для испытаний вакуумных присосок различных конструктивов и материалов на сдвиг в различных средах | 2024 |
|
RU2841052C1 |
| МАНИПУЛЯТОР ДЛЯ УКЛАДКИ ДОРОЖНЫХ БОРДЮРОВ И ПЛИТКИ | 2024 |
|
RU2837513C1 |
| СИСТЕМА УПРАВЛЕНИЯ ШАГАЮЩИМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1990 |
|
RU1739607C |
Изобретение относится к транспортным роботам, перемещающимся по наклонным поверхностям. Цель изобретения - повышение надежности работы аварийной фиксации. Шагающий робот состоит из платформы 1, установленной на двух группах поочередно передвигающихся выдвижных захватов 3, связанных с основным источником 5 вакуума. Под платформой 1 установлен аварийный захват 6, внутри которого смонтирована опора 10с упругой зубчатой перфорированной поверхностью 1 и жидкостью 12. Захват 6 и опора 10 установлены на выдвижном штоке 7 пневмоцилиндра 8 и полость захвата 6 соединена с дополнительным источником вакуума, имеется также Система управления. При падении давления основного источника 5 вакуума шток 7 выдвигается, из захватов выкачивается воздух, а поршень 9 опускается, выдавливая в место контакта зубчатой 11 и опорной поверхности жидкость 12, которая, затвердевая, уплотняет крепление аварийнсго захвата. Тил.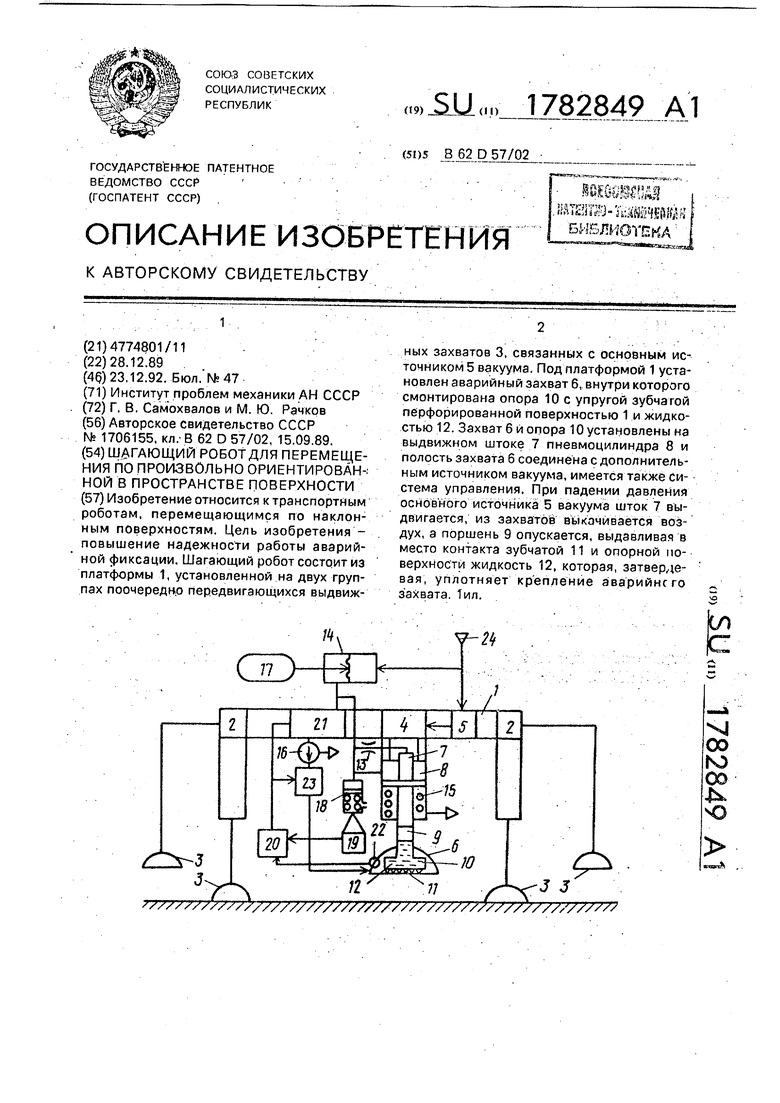
Э±ь
00
Ю
со
ю
///////////// /// ///
Изобретение относится к транспортному машиностроению, а именно к транспортным роботам, перемещающимся по наклонным поверхностям.
Известно транспортное средство, содержащее платформу с приводом перемещения двух групп захватов, связанных каналом питания с источником вакуума.
Недостатком известного устройства является отсутствие средств аварийного удер- жания транспортного средства на наклонной поверхности в случаях нарушения режима вакуумирования в каналах питания захватов.
Наиболее близким к предлагаемому является шагающий робот для перемещения по наклонной поверхности. Робот содержит платформу с приводом перемещения двух групп захватов и аварийный захват, который связан с полым штоком пневмоцилинд- ра, который установлен на платформе параллельно оси захватов и имеет подпружиненную и соединенную с атмосферой нижнюю полость. В штоке размещен подвижный уплотняющий элемент (поршень или мембрана), опора с упругой зубчатой поверхностью и промежуточной жидкостью. Верхний конец штока гибкой связью через дроссель соединен с выходом одно- мембранного элемента и с верхней полостью цилиндра, в нижней полости которого установлена пружина, а также связан со входом эжектора, выход которого связан с полостью захвата. Управляющий вход мембранного элемента соединен со входом эжектора, а питающий вход расположен в выходной камере, связанной с автономным источником сжатого воздуха, который может быть расположен на корпусе транспортного средства или на стационарной станции обслуживания с системой управления транспортным средством.
В известном транспортном средстве обеспечивается аварийное удержание транспортного средства за счет полного расхода сжатого воздуха из автономного источника, что с одной стороны требует ис- пол ьзования максимального количества сжатого воздуха, а с другой стороны - не позволяет с помощью того же автономного источника производить в случае необходимости повторные аварийные удержания, что снижает надежность аварийной фиксации в целом.
Цель изобретения - повышение надежности аварийной фиксации.
Указанная цель достигается тем, что в известное устройство, содержащее плат- Форму с приводом перемещения двух групп
захватов, связанных каналом питания с источником воздуха через блок снятия разрежения, дополнительный захват, пневмоцилиндр, автономный источник сжатого воздуха, дополнительный источник вакуума, однообразный элемент, дроссель и блок механической фиксации, причем источники вакуума выполнены в виде эжекторов, пневмоцилиндр установлен на
0 платформе параллельно основным захва- там и выполнен с полым штоком, верхний
конец которого гибкой связью, в которой
установлен дроссель, соединен с выходом
одномембранного элемента, управляющий
5 вход которого связан со входом основного источника вакуума, а питающий вход - с автономным источником сжатого воздуха, при этом вход дополнительного источника вакуума соединен с выходом одномембран0 ного элемента и с верхней полостью пнев- моцилиндра, а выход - гибкой связью с полостью дополнительного захвата, нижняя полость пневмоцилиндра подпружинена и связана с атмосферой, причем нижний ко5 нец полого штока жестко связан с дополнительным захватом и с блоком механической фиксации, размещенным в полости дополнительного захвата, и выполненным в виде подвижного элемента, например, поршня,
0 установленного в нижней части полого штока с возможностью взаимодействия с опорой с зубчатой поверхностью, обращенной к поверхности фиксации, герметично связанной с нижним концом штока, через про5 межуточную жидкость, в качестве которой используют клеящее вещество, а в опоре выполнена перфорация, соединяющая зубчатую поверхность с нижней полостью штока, введены дополнительный пневмоци0 линдр, реле времени, два электропневмок- лапана, датчик давления и элемент И, причем одна полость дополнительного пневмоцилиндра соединена с выходом одномембранного элемента, а вторая полость
5 снабжена пружиной, соединена с атмосферой и под ней установлено реле времени с возможностью взаимодействия с поршнем дополнительного пневмоцилиндра, при этом выход реле времени связан через
0 первый вход элемента И с управляющими входами электропневмоклапанов, при- . чем первый электропневмоклапан установлен в канале гибкой связи дополнительного источника вакуума с полостью до5 п олнительного захЁата, с которой связан датчик давления, выход которого соединен со вторым входом элемента И, а второй электропневмоклапан установлен между выходом одномембранного элемента и входом дополнительного источника вакуума
Положительный эффект достигается за счет введения измерительно-сравнивающего контура, позволяющего автоматически включать и отключать автономный источник сжатого воздуха.
На чертеже приведена схема устройства.
Робот содержит платформу 1 с приводом 2 перемещения двух групп выдвижных захватов 3, связанных (на чертеже не показано) через управляющий клапан 4, в качестве которого может использоваться распределитель П-РЭЗ/1, с основным источником вакуума 5, в качестве которого может быть использован эжектор. Аварийный захват 6 связан с полым штоком 7 пневмо- цилиндра 8, который установлен на платформе 1 параллельно оси захватов 3 и имеет соединенную с атмосферой нижнюю полость с размещенной в ней пружиной 15, В штоке 7 размещено средство механической фиксации захвата на опорной поверхности в виде подвижного уплотняющего элемента 9 (поршень или мембрана), опоры 10с упругой зубчатой поверхностью 11 и промежуточной жидкостью Т2. Верхний конец штока 7 гибкой связью через дроссель 13 соединен с выходом одномембранного элемента 14 и с верхней полостью цилиндра 8, в нижней полости которого установлена пружина 15, а также связан с входом эжектора 16, используемого в качестве дополнительного источника вакуума, выход которого связан с полостью захвата 6, Управляющий вход мембранного элемента 14 соединен со входом эжектора 5 а питающий вход элемента 14 расположен в выходной камере, связанной с автономным источником 17 сжатого воздуха, который может быть расположен на корпусе транспортного средства 1 или на стационарной станции обслуживания с системой управления транспортным средством. Выход элемента 14 связан через дополнительный пневмоцилиндр 18 и реле времени 19 с первым входом элемента И 20 и через клапан 2 1 соединен с эжектором 16. Датчик 22 связан через второй вход элемента 20 с управляющими входами электро- пневмоклапанов 21 и 23, отсекающими эжектор 16. При этом канал связи от второго электропневмоклапзна 21 до первого элек- тропневмоклапана 24, а от него до полости дополнительного (аварийного) захвата 6 выполнен гибким, чтобы обеспечить возможность перемещения последнего. Робот связан магистралью 24 с основ -шм источником сжатого воздуха, напримео, компрессором (на чертеже не показан)
Устройство работает следующим образом. При номинальном длалении сжатого
воздуха на выходе блока 13 платформа перемещается с помощью поочередного фиксирования и передвижения вдоль поверхности двух групп выдвижных захватов 5 3 посредством приводов 2. Фиксирование и освобождение захватов 3 осуществляется управляющим клапаном 4, соединяющим соответственно полости захватов 3 с выходом основного источника вакуума Бис атмосфе- 0 рой. Использование эжекторов в качестве источников вакуума в принципе позволяет иметь для каждого захвата автономный источник вакуума, что повышает надежность фиксации в целом при разгерметизации от5 дельных захватов в группе. Пружина фиксирует поршень штока 7 с захватом 6 в верхнем положении. В управляющей камере элемента 14 номинальное давление на входе эжектора 5 обеспечивает прикрытие
0 мембраной сопла питающего входа, связанного с источником 17.
При падении давления на входе эжектора 5 происходит аварийное срабатывание пневмопривода 8 за счет отхода мембраны
5 от сопла в элементе 14 при критическом значении давлений, что обеспечивается подбором жесткостей соответствующих элементов. В результате давление от источника 17 подается в верхнюю полость цилин0 дра 8, и захват 6, преодолевая усилие пружины 15, входит в контакт с поверхностью фиксации. Одновременно с этим включается эжектор 16 и вакуумирует полость захвата 6, После этого с задержкой, обеспе5 чиваемой дросселем 13, увеличивается давление в верхней полости штока 7, которое через элемент 9 и -кндкость 12 вдавливает зубчатую поверхность 11 в поверхность фиксации, что позволяет повысить нэдеж0. ность фиксации на поверхностях с невысокой твердостью, например, деревянных. Элемент 9 позволяет исключить испарение жидкости 12 из опоры 10, но работоспособ- ность устройства сохраняется и при его от5 сутствии. Использование жидкости 12 позволяет равномерно распределить усилие по поверхности 11. После выработки ресурса источника 17 сохраняется аварийный захват по поверхности 11.
0 Для повышения надежности фиксации на поверхностях с повышенной твердостью, например металлических, в опоре выполняется перфорация, соединяющая зубчатую поверхность с полостью штокз,
5 где в качестве промежуточной жидкости используется клеящее нещество. При отсутствии давления в верхней полости штока клеящее вещество не выходит за пределы перфорации из-за сил поверхностного натяжения и высокой вязкости, а при наличии
давления выдавливается, связывая поверхность 11 с поверхностью фиксации.
Эжектор 16 включается при наличии двух сигналов на входе элемента И 20, один из которых поступает от элемента 19 в течение времени, соответствующего известному времени затвердевания клеящего вещества в полости захвата 6. Элемент 19 выполняется на базе реле времени, которое включается поршнем дополнительного пневмоцилиндра 18, преодолевающем усилие пружины при срабатывании элемента 14. Второй сигнал, необходимый для срабатывания элемента И 20, поступает от датчика давления 22 и соответствует времени набора необходимой для фиксации захвата б степени вакуума. После отключения одного из входных сигналов элемента И 20 срабатывают электропневмоклапаны 21 и 23, отсекающие источник 17 и захват 6 от атмосферы, тем самым прекращая расход воздуха из источника 17 и обеспечивая фиксацию захвата 6. Благодаря этому источник 17 может быть использован многократно и для нескольких аварийных захватов 6, что повышает надежность фиксации транспортного средства на вертикальных и наклонных поверхностях.
Формула изобретения Шагающий робот для перемещения по произвольно ориентированной в пространстве поверхности, содержащий платформу с
приводом перемещения двух групп выдвинутых вакуумных захватов, связанных через управляющий клапан с основным источником вакуума, и прикрепленный к нижнему концу подпружиненного полого штока пневмоцилиндра аварийный вакуумный захват, соединенный с дополнительным источником вакуума, вход которого связан с выходом одномембранного элемента, и средство механической фиксации на опорной поверхности, отличающийся тем, что, с целью повышения надежности работы аварийной фиксации, он снабжен дополнительным пневмоцилиндром, реле времени, двумя дополнительными электроклапанами, датчиком давления и элементом И, при этом одна полость дополнительного пневмоцилиндра соединена с выходом одномембранного элемента, вторая, в которой установлена подпирающая поршень пружина, - с атмосферой и реле времени, взаимодействующим с этим поршнем и через первый вход элемента И - с управляющими входами двух дополнительных электроклапанов, первый из которых установлен в гибкой связи дополнительного источника вакуума с полостью аварийного вакуумного захвата, в которой помещен датчик давления, соединённый с вторым входом элемента И, а второй - между выходом одномембранного элемента и входом дополнительного источника вакуума.
| Авторское свидетельство СССР № 1706155, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
