(Л
с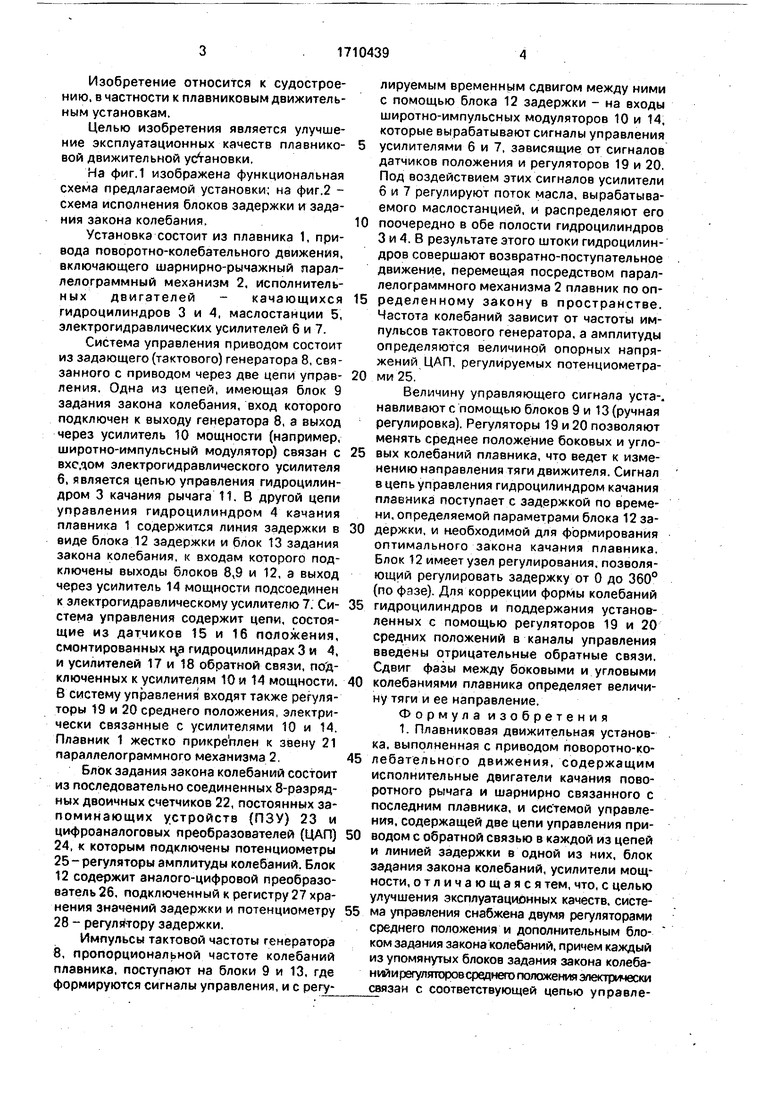
| название | год | авторы | номер документа |
|---|---|---|---|
| Плавниковая движительная установка | 1989 |
|
SU1782866A2 |
| Плавниковый движитель | 1981 |
|
SU977272A1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОКАНАЛЬНЫМ ВИБРОСТЕНДОМ | 1998 |
|
RU2159949C2 |
| Движительно-рулевой комплекс плавникового движителя | 1983 |
|
SU1143646A1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| Многоканальный испытательный стенд | 1991 |
|
SU1824528A1 |
| Система программного управления электроприводом | 1987 |
|
SU1481708A1 |
| Стенд для испытания блока цилиндров двигателя внутреннего сгорания на усталость | 1984 |
|
SU1268985A1 |
| Устройство для управления положением кромки ленточного материала | 1988 |
|
SU1594096A1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ДВОЙНОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1992 |
|
RU2037263C1 |
Изобретение относится к судостроению, в частности к nлaв^nлкoвымr движитель- ным установкам.является улучшение эксплуатационных качеств плавниковой движительной установки за счет оптимизации закона колебания плавника. Установка состоит из плавника 1*. привода поворотно-колебательного движения, включающего шарнирно-рычажный па- раллелограммный механизм 2, исполнительных двигателей - гидроцилиндров 3 и 4, электрогидравлйческих усилителей 6 и 7. Система ,,управления приводом состоит из задающего генератор^, регуляторов среднего положения, усилителей мощности, усилителей обратной связи, блоков задания законов колебаний, 1 з.п. ф-лы, 2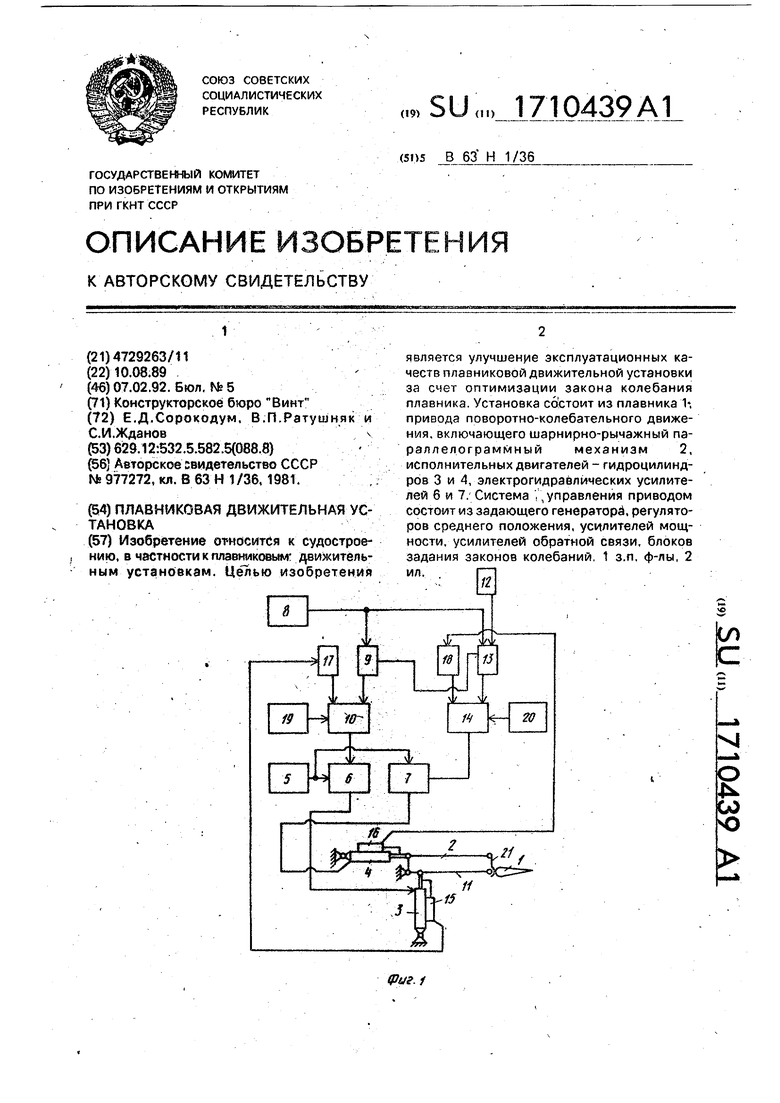
со
Ч)
Изобретение относится к судостроению, в частности к плавниковым движительным установкам.
Целью изобретения является улучшение эксплуатационных качеств плавниковой движительной установки.
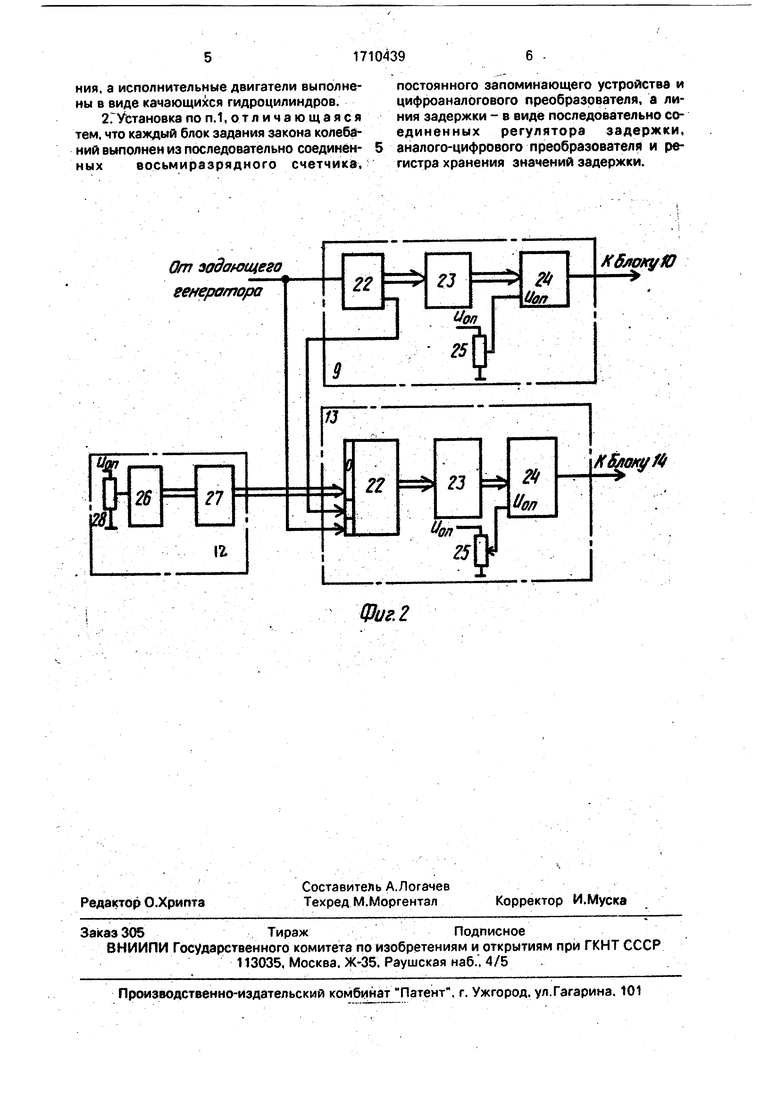
На фиг.1 изображена функциональная схема предлагаемой установки; на фиг.2 схема исполнения блоков задержки и задания закона колебания.
Установка состоит из плавника 1, привода поворотно-колебательного движения, включающего шарнирно-рычажный параллелограммный механизм 2, исполнительных двигателей - качающихся гидроцилиндров 3 и 4, маслостанции 5, электрогидравлических усилителей б и 7.
Система управления приводом состоит из задающего (тактового) генератора 8, связанного с приводом через две цепи управления. Одна из цепей, имеющая блок 9 задания закона колебания, вход которого подключен к выходу генератора 8. а выход через усилитель 10 мощности (например, широтно-импульсный модулятор) связан с входом электрогидравлического усилителя б, является цепью управления гидроцилиндром 3 качания рычага 11. В другой цепи управления гидроцилиндром 4 качания плавника 1 содержится линия задержки в виде блока 12 задержки и блок 13 задания закона колебания, к входам которого подключены выходы блоков 8,9 и 12, а выход через усилитель 14 мощности подсоединен к злектрогидравлическому усилителю 7. Система управления содержит цепи, состоящие из датчиков 15 и 16 положения, смонтированных ца гидроцилиндрах 3 и 4, и усилителей 17 и 18 обратной связи, пой,ключенных к усилителям 10 и 14 мощности. 8 систему управления входят также регуляторы 19 и 20 среднего положения, электрически связанные с усилителями 10 и 14. Плавник 1 жестко прикреплен к звену 21 параллелограммного механизма 2,
Блок задания закона колебаний состоит из последовательно соединенных 8-разрядных двоичных счетчиков 22, постоянных запоминающих устройств (ПЗУ) 23 м цифроаналоговых преобразователей (ЦАП) 24, к которым подключены потенциометры 25-регуляторы амплитуды колебаний. Блок 12 содержит аналого-цифровой преобразователь 26, подключенный к регистру 27 хранения значений задержки и потенциометру 28 - регул5й ору задержки.
Импульсы тактовой частоты генератора 8, пропорциональной частоте колебаний плавника, поступают на блоки 9 и 13, где формируются сигналы управления, и с регулируемым временным сдвигом между ними с помощью блока 12 задержки - на входы широтно-импульсных модуляторов 10 и 14, которые вырабатывают сигналы управления
усилителями 6 и 7, зависящие от сигналов датчиков положения и регуляторов 19 и 20. Под воздействием этих сигналов усилители 6 и 7 регулируют поток масла, вырабатываемого маслостанцией, и распределяют его
0 поочередно в обе полости гидроцилиндров 3 и 4. В результате этого штоки гидроцилиндров совершают возвратно-поступательное движение, перемещая посредством параллелограммного механизма 2 плавник по определенному закону в пространстве. Частота колебаний зависит от частоты импульсов тактового генератора, а амплитуды определяются величиной опорных напряжений ЦАП. регулируемых потенциометра0 ми 25.
Величину управляющего сигнала уста-, навливают с помощью блоков 9 и 13 (ручная регулировка). Регуляторы 19 и 20 позволяют менять среднее положение боковых и угловых колебаний плавника, что ведет к изменению направления тяги движителя. Сигнал в цепь управления гидроцилиндром качания плавника поступает с задержкой по времени, определяемой параметрами блока 12 задержки, и необходимой для формирования оптимального закона качания плавника. Блок 12 имеет узел регулирования,позволяющий регулировать задержку от О до 360° (по фазе). Для коррекции формы колебаний
5 гидроцилиндров и поддержания установленных с помощью регуляторов 19 и 20 средних положений в каналы управления введены отрицательные обратные связи. Сдвиг фазы между боковыми и угловыми
0 колебаниями плавника определяет величину тяги и ее направление.
Формула изобретения 1. Плавниковая движительная установка, выполненная с приводом поворотно-ко5 лебательного движения, содержащим исполнительные двигатели качания поворотного рычага и шарнирно связанного с последним плавника, и системой управления, содержащей две цепи управления приводом с обратной связью в каждой из цепей и линией задержки в одной из них, блок задания закона колебаний, усилители мощности, отличающаяся тем, что, с целью улучшения эксплуатационных качеств, система управления снабжена двумя регуляторами среднего положения и дополнительным блоком задания закона колебаний, причем каждый из упомянутых блоков задания закона колебанийирегуляторовсреднего положения электрически связан с соответствующей цепью управления, а исполнительные двигатели выполнены в виде качающихся гидроцилиндров.
2ГУстановка по п.1, отличающаяся тем, что каждый блок задания закона колебаний выполнен из последовательно соединённых восьмиразрядного счетчик а.
постоянного запоминающего устройства и цифроаналогового преобразователя, а линия задержки - в виде последовательно соединенных регулятора задержки, аналого-цифрового преобразователя и регистра хранения значений задержки.
(Риг. 2
