Изобретение относится к подъемнотранспортному оборудованию и касается конструкции маневрового тягама для сортировочной работыС железнодорожными вагонами.
Цель изобретения - повышение эффективности работы тягача.
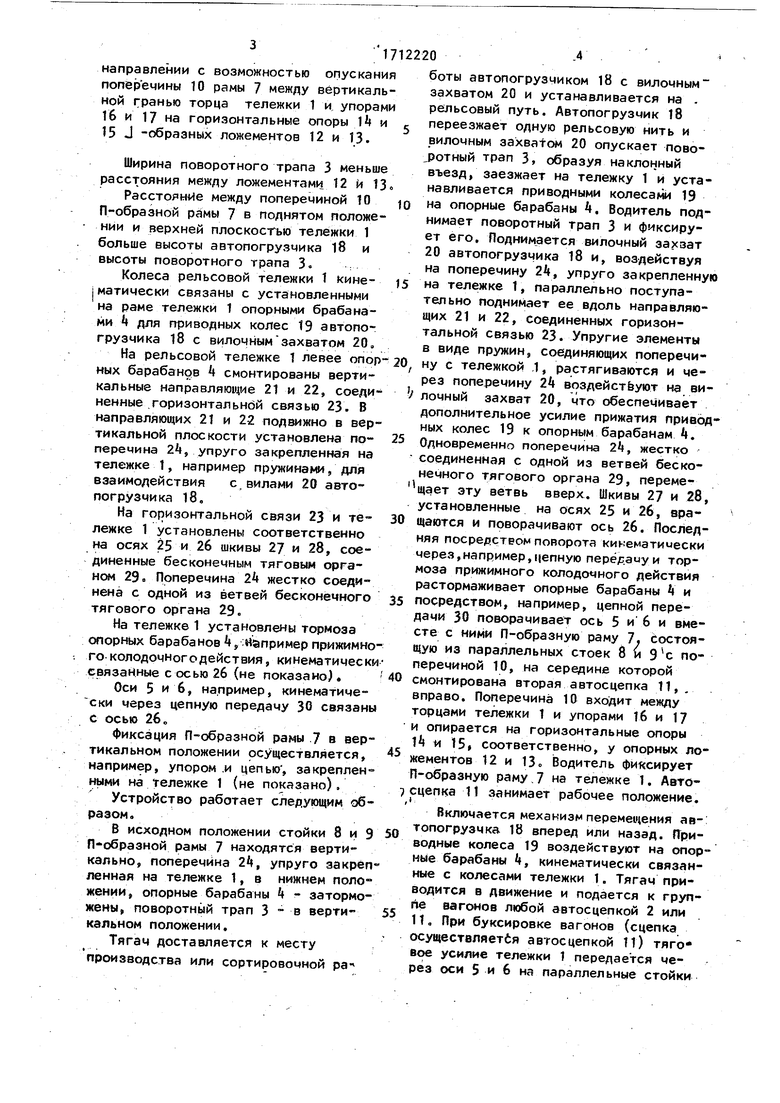
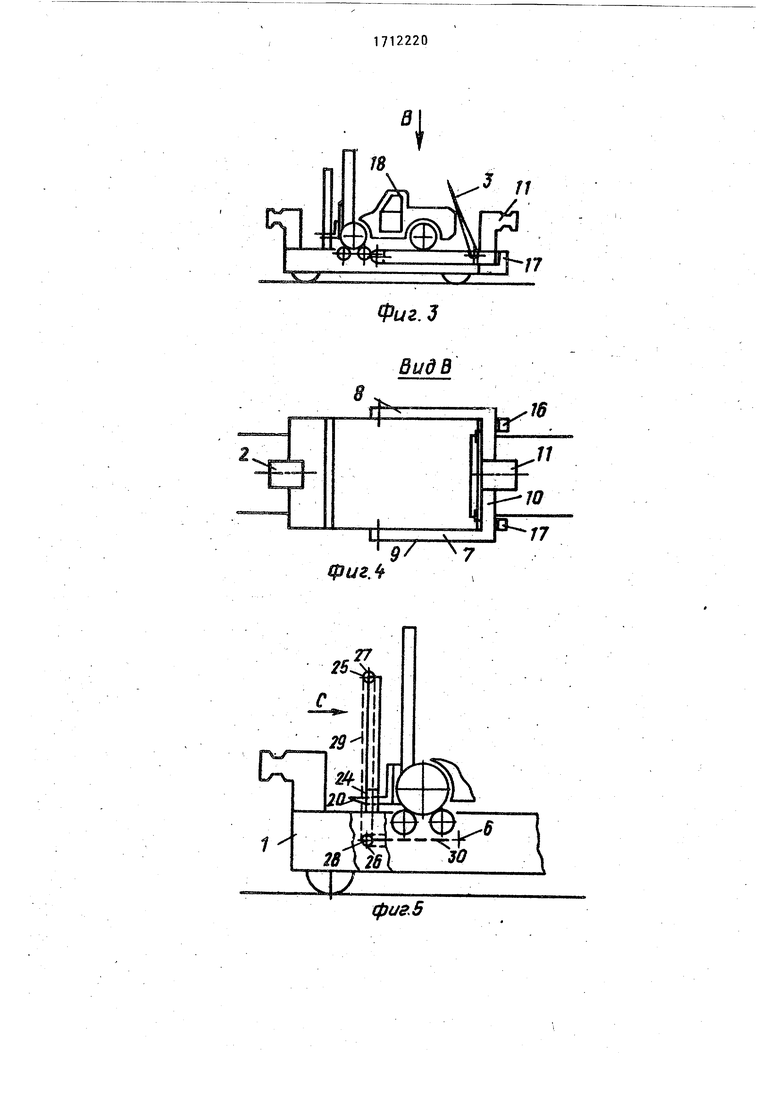
На фиг. 1 показан тягач, исходное положение; на фиг. 2 - вид А на фиг.Г, на фиг. 3 - тягач, рабочее положение; на фиг. k - вид В на фиг.З; «а фиг.5 узел привода Поворота П-образмой раму; на фиг.6 - вид С на фиг.5.
Рельсовый тягач состоит из рельсовой тележки.1с колесами, автосцепки 2, TioBopoTHoro трапа 3, механизма передвижения с опорными барабанами k. Ha боковых сторонах тележки 1 на
горизонтальных осях 5 и 6 смонтирована П-обра зная рама 7, состоящая из
;параллельных стоек 6 и S, соединенных
to hd ю поперечиной 10, на середине которой смонтирована вторая автосцепка 11. На торце тележки 1 установлены J -образКйяе лс кементы 12 и 13, состоящие из горизонтальных опор И и 15 и вертикальных упоров 1б и 17. Горизонтальные опоры, И и 15 ложементов 12 и
t3 служат для опоры поперечины 10
Й-образной рамы 7, a вертикальные упоры J6 и 17 - для обеспечения стопорения поперечины 10 в горизонтальной плоскости при движении рельсового тягача со с цепом вагонов влево. П-образная рама 7 смонтирована на тележке 1, поворотной в продольном направлении с возможностью опускания поперечины 10 рамы 7 между вертикаль ной гранью торца тележки 1 и, упорами 1б и 17 на горизонтальные опоры 1 и 15 J -образных ложементов 12 и 13. Ширина поворотного трапа 3 меньше расстояния между ложементами 12 и 13 Расстоян+ е между поперечиной 10 П-образной рамы 7 в поднятом положении и верхней плоскостью тележки 1 больше высоты автопогрузчика 18 и высоты поворотного трапа 3. : Колеса рельсовой тележки 1 кине1матически связаны с установленными на раме тележки 1 опорными брабанами k для приводных колес 19 автопогрузчика 18 с вилочнымзахватом 20, На рельсовой тележке 1 левее опорных барабанов 4 смонтированы вертикальные направляющие 21 и 22, соединенные .горизонтальной связью 23. В направляющих 21 и 22 подвижно в вертикальной плоскости установлена поперечина упруго закрепленная на тележке 1, например пружинами, для взаимодействия с вилами 20 автопогрузчика 18, На горизонтальной связи 23 и тележке 1 установлены соответственно на осях 25 и 26 шкивы 27 и 28, соединенные бесконечным тяговым органом 29 Поперечина 2А жестко соединена с одной из ветвей бесконечного тягового органа 29. На тележке 1 установлены тормоза опорных барабанов jj :Мапример прижимно го колодочного деист ВИЯ, кинематически связанные с осью 26 (не показано). Оси 5 и 6, например, кинематиче ски через цепную передачу 30 связаны с осью 26„ фиксация П-образной рамы J в вертикальном положении осуществляется, например, упором .и цепью , закрепленными на гележке 1 (не показано). Устройство работает следующим образом.- Q о В исходном положении стоики 8 и 9 П-образной рамы 7 находятся вертикально, поперечина 24, упруго закреп ленная на тележке 1, в нижнем положении, опорные барабаны 4 - заторможены, поворотный трап 3 - в вертикальном положении. Тягач доставляется к месту производства или сортировочной ра10-4 боты автопогрузчиком 18 с вилочным захватом 20 и устанавливается на . рельсовый путь. Автопогрузчик 18 переезжает одную рельсовую нить и вилочным 3axBatoM 20 опускает пово)oтный трап 3, образуя наклонный въезд, заезжает на тележку 1 и устанавливается приводными колесами 19 на опорные барабаны , Водитель поднимает поворотный трап 3 и фиксирует его. Поднимается вилочный захват 20 автопогрузчика 18 и, воздействуя на поперечину 24, упруго закрепленную на тележке 1, параллельно поступательно поднимает ее вдоль направляющих 21 и 22, соединенных горизонтальной связью 23. Упругие элементы в виде пружин, соединяющих поперечину с тележкой ,1, растягиваются и через поперечину 24 воздействуют на вилочный захват 20, что обеспечивает дополнительное усилие прижатия приводных колес 19 к опорным барабанам 4. Одновременно поперечина 2Ц, жестко соединенная с одной из ветвей бесконечного тягового органа 29, перемещает эту ветвь вверх. Шкивы 27 и 28, установленные на осях 25 и 26, вращаются и поворачивают ось 26. Последняя посредством поворота кинематически через,например, цепную передачу и тормоза прижимного колодочного действия растормаживает опорные барабаны 4 и посредством, например, цепной передачи 30 поворачивает ось 5 и 6 и вместе с ними П-образную раму 7, Ьостоя9х пощую из параллельных стоек перечиной 10, на середине которой смонтирована вторая автосцепка 11,, вправо. Поперечина 10 входит между торцами тележки 1 и упорами 16 и 17 и опирается на горизонтальные опоры 14 и 15 соответственно, у опорных ложементов 12 и 13 о Водитель фиксирует П-образную раму,7 на тележке 1. Автосцепка 11 занимает рабочее положение. Включается механизм перемещения аи-: топогрузчка 18 вперед или назад. При «к водные колеса 19 воздействуют на опорные барабаны 4, кинематически связанные с колесами тележки 1. Тягач приводится в движение и подается к групrte вагонов любой автосцепкой 2 или 11, При буксировке вагонов (сцепка осуществляетйя автосцепкой 11) тяго вое усилие тележки 1 передается через оси 5 и 6 на параллельные стойки 8 и9, а также вертикальные упоры 16 и 17 - на поперечину 10 П-образной рамы 7 автосцепку 11 и вагон. При осаживании вагонов толкающее тележки 1 передается через оси 5 и $ на параллепьные стойки 8 и 9, а та же торец тележки 1 - на поперечину 10, автосцепку 11 и вагон. После окончания работ устройство приводится в исходное положение. Автопогрузчик 18 съезжает по трапу 3,переезжает рельсовый путь и снимает, вилами 10 тягач с рельсового пути. Использование тягача позволяет сократить затраты времени на выполнение маневровых и сортировоч ных работ за счет возможности тягача с обеих сторон. Увеличение тягового усилия, достигаемое за счет дополнительного усилия прижатия приводных колес автопогрузчика к опор ным барабанам тягача, обеспечивает надежность работы устройства. .
Фб/г. 7 0 мула изобретения Рельсовый тягач, содержащий рельсовую тележку с колесами, кинематически связанными с установленными на раме тележки опорными барабанами для приводных колес автопогрузчика, отличающийся тем, что, с целью повышения эффективности, он снабжен смонтированными на : тележке поворотной в продольном направлении П-образной рамой, несущей автосцепку, и вертикальными направляющими, в которых размещена упруго закрепленная на тележке поперечина для взаимодействия с рабочим органом автопогрузчика, кинематически связанная с П-образной рамой, 2. Тягач по п,1, о т л и ч а ю щ и и с я тем, что тележка выполнена с J -образными ложементами, расположенными с возможностью опускания на них поперечины П-образной рамы . . 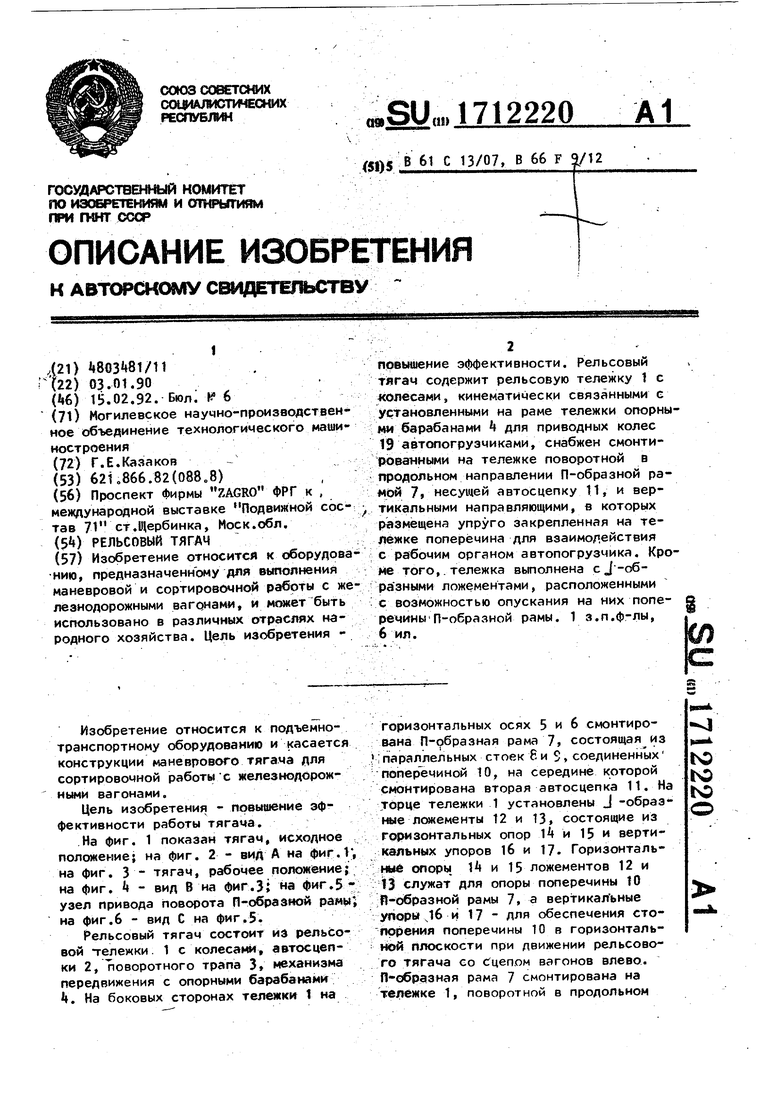

| название | год | авторы | номер документа |
|---|---|---|---|
| МАНЕВРОВОЕ УСТРОЙСТВО ДЛЯ ВАГОНОВ | 2009 |
|
RU2405697C1 |
| ВЕСОПОВЕРОЧНЫЙ КОМПЛЕКС | 1990 |
|
RU2022833C1 |
| Маневровое устройство | 1989 |
|
SU1705163A1 |
| МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ СОРТИРОВКИ КРУГЛЫХ ЛЕСОМАТЕРИАЛОВ И ПОШТУЧНОЙ РАЗБОРКИ ИХ ПАЧЕК | 1990 |
|
RU2029639C1 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| СПОСОБ ПОГРУЗКИ САМОХОДНОЙ ТЕХНИКИ НА ЖЕЛЕЗНОДОРОЖНУЮ ПЛАТФОРМУ И ЖЕЛЕЗНОДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2001 |
|
RU2229993C2 |
| ВАГОНОТОЛКАТЕЛЬ ДЛЯ ПЕРЕМЕЩЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ (ВАРИАНТЫ) И ПЛАТФОРМА ВАГОНОТОЛКАТЕЛЯ ДЛЯ ПЕРЕМЕЩЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2011 |
|
RU2477694C2 |
| Устройство для перемещения вагонов | 1989 |
|
SU1703524A1 |
| Поъемник | 1990 |
|
SU1791368A1 |
Изобретение относится к оборудованию, предназначенному для выполнения маневровой и сортировочной работы с железнодорожными вагонами, и мгмкет быть использовано в различных отраслях народного хозяйства. Цель изобретения -лрвышение эффективности. Рельсовый TisraM содержит рельсовую тележку 1 с колесами, кинематически связанными с установленными на раме тележки опорными барабанами ^t для приводных колес 19 автопогрузчиками, снабжен смонтированными на тележке поворотной в продольном направлении П-образной рамой 7, несущей автосцепку 11, и вертикальными направляющими, в которых размещена упруго закрепленная на те- /шжке поперечина для взаимодействия с рабочим органом автопогрузчика. Кроме того,. тележка вьшолнена с J'-об- ра'зными ложементами, расположенными с возможностью опускания на них поперечины П-образной рамы. 1 з.п.ф-лы, 6 ил.
-Вид А Ш /2 ,
л
V
XfJ
fuz.Z
5
ft
у у
Фиг,3
фигЛ
Г7
Р/
фиг 5
Виде
(puff.В
| Проспект Фирмы "ZAGRO" ФРГ к , международной выставке "Подвижной сос-^^ тав 71" ст.и(ербинка, Моск.обл. |
