Предлагаемое изобретение относится к геофизическому приборостроению и предназначено для использования как в средствах технологического контроля процесса сборки сейсмоприемников на приборостроительных предприятиях, так и г геофизических экспедициях при контроле работоспособности электродинамических сейсмоприемников (ЭДСП).
Предлагаемое техническое решение позволяет осуществить подбор ЭДСП. работающих при амплитудах контролируемых вибросмещений, сопоставимых с значения ми возможных смещений катушки, обусловленных конструкцией ЭДСП, а также контролировать релаксацию во времени упругих элементов подвески катушки.
Известно устройство, обеспечивающее визуальный контроль положения катушки в ЭДСП. Недостатком является необходимость наличия открытой конструкции ЭДСП.
Известно также устройство, в котором осуществляется контроль перемещения катушки ё ЭДСП по результатам интегрирования выходного сигнала после окончания возбуждающего импульса тока. Устройство, реализующее это решение, содержит генератор тока, ключ интегратор, блок измерения, управления и вычислений. Недостатком этого решения является низкая точность определения положения катушки в ЭДСП, так как измерение осуществляется при отклонении катушки только в одну сторону.
Целью изобретения является повышение, точност определения относительного положения катушки в ЭДСП.
Поставленная цель достигается тем, что в устройство, содержащее генератор тока, аналоговый ключ, аналого-цифровой интегратор, блок управления и блок вычислений, при этом выход генератора тока соединен через аналоговый ключ с входом сейсмоприемника, соединенным с входом аналогоцифрового интегратора, выходы блока управления соединены с входами управления аналогового ключа, аналого-цифрового интегратора и блока вычислений, введены вторые генератор тока и аналоговый ключ, два регистра памяти и цифровой сумматор, причем выход второго генератора тока через второй аналоговый ключ соединен с входом сейсмоприемника, а информационные выходы аналого-цифрового интегратора соединены с информационными входами регистров памяти, выходы которых соединены с входами цифрового сумматора, выходы которого и выходы одного из регистров памяти соединены с входами блока вычислений, при этом выходы блока управления соединены с входами управления второго аналогового ключи и регистров памяти, а с целью упрощения блок управления содержит генератор импульсов, подключенный к входу счетчика, выходы которого через формирователи сигналов соединены с соответствующими выходами блока управления.
Введенные в устройство новые узлы: второй генератор тока и второй аналоговый ключ, позволяют отклонять катушку ЭДСП в обе стороны от положения равновесия; регистры памяти и цифровой сумматор позволяют осуществить вычисление относительного положения катушки в ЭДСП.
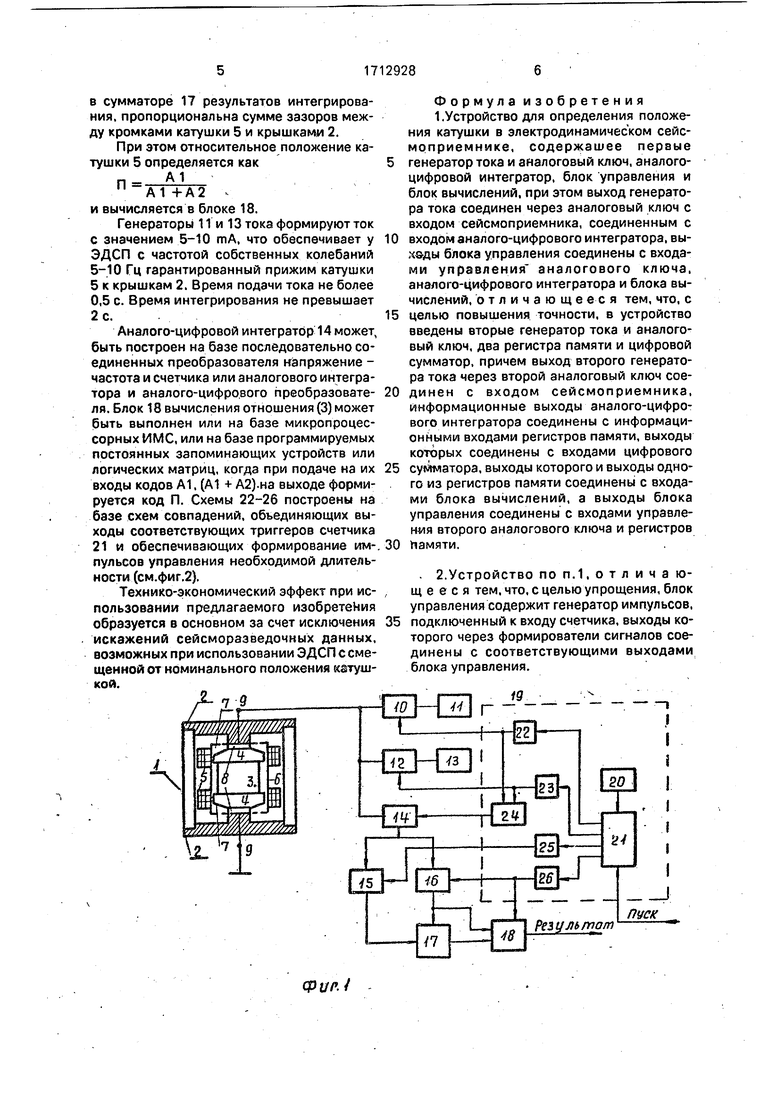
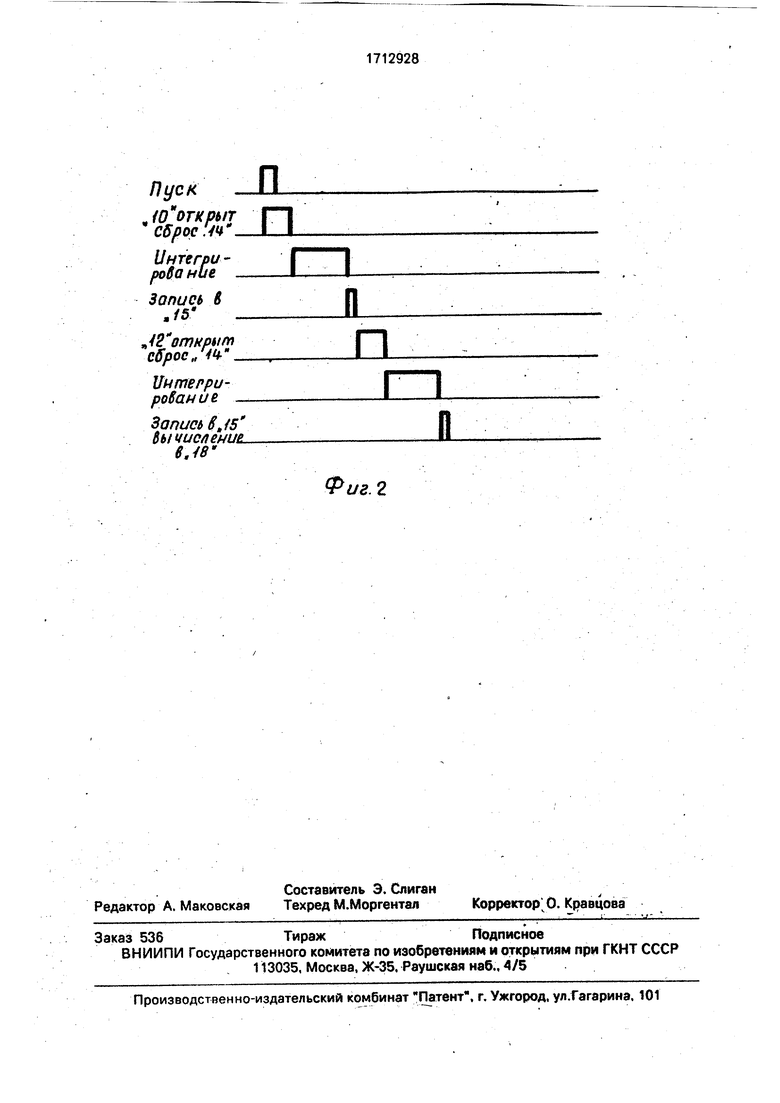
На фиг.1 представлена блок-схема устройства; на фиг.2 - временная диаграмма работы блока управления.
Общепринятая конструкция ЭДСП (например, СВ2-10Ц) состоит из магнитомягкого цилиндра 1. крышек 2 из изоляционного материала, постоянного магнита 3. полюсных наконечников А, катушки 5 из двух встречно включенных обмоток на каркасе б, подвешенном на пружинах 7. Блок из магнита 3 с полюсными наконечниками 4 зажат крышками 2 через изоляционные шайбы 8, обеспечивающие также развязку выводов катушки 5, выходной сигнал которой через пружины 7 подается на выводы 9. В состав устройства входят генераторы 11 и 13 тока, аналоговые ключи 10 и 12, аналого-цифровой интегратор 14, регистры 15 и 16 памяти, цифровой сумматор 17, блок 18 вычислений, блок 19 управления, содержащий генератор 20 импульсов, счетчик 21, схемы 22-26 формирования управляющих сигналов.
Выходы генераторов 11 и 13 тока через аналоговые ключи 10 и 12 соединены с одним из выводов 9 ЭДСП и входом аналогово-цифрового интегратора 14, информационные выходы последнего соединены с информационными входами регистров 15 и 16 памяти, выходы триггеров которых соединены с входами цифрового сумматора 17. Выходы последнего и выходы регистра 16 соединены с входами блока 18 вычислений. Входы управления ключей 10 и 12, вход сброса интегратора 14, входы записи регистров 15 и 16, вход управления блока 18 вычислений соединены с выходами управления блока 19 управления, в котором выход генератора 20 импульсов, соединен с входом счетчика 21, выходы триггеров которого соединены с входами схем 22-26 формирования управляющих сигналов.
Работа устройства заключается в формировании, контроле и обработке сигналов, связанных с перемещением катушки 5 от крышек 2 к положению равновесия после подачи сигнала Пуск (Сброс) на счетчик 21 блока 19 управления. Отклонение катушки 5 к крышкам обеспечивается подачей в катушку тока соответствующего значения от генератора тока (11 или 13) через ключ (10 или 12). управляемый сигналом с соответствующего выхода блока 19 управления (формирователи 22 или 23) с одновременным обнулением интегратора 14 сигналом с выхода формирователя 24 блока 19 управления. Полярность тока определяет направление смещения катушки 5, а длительность выбирается из условия обеспечения надежного прижима катушки 5 к крышкам 2 или другим ограничителям хода катушки.
По окончании импульса тока - при отключении катушки 5 от генератора тока начинается процесс движения катушки к исходному положению. Напряжение E(t). генерируемое в катушке и выводимое через выводы 9, определяется соотношением
E(t)-K-X(t),(1)
где К - КЭМС ЭДСП;
X - перемещение катушки.
Перемещение катушки, в общем случае определяемое как /X(t)dt, равно
E(t)«dt при t-.
(2)
где t - время интегрирования до полного затухания переходных процессов.
Таким образом, после отклонения катушкм 5 вверх и вниз и интегрирования сигнала E(t) по формуле (2) с. соответствующим преобразованием сформируются результаты (А1 и А2), фиксируемые в регистрах 15 или 16 памяти соответственно (по сигналам формирователей 25 или 2 6 блока 19 уп равления) и пропорциональные пройденному расстоянию от соответствующей крышки к положению равновесия, а сумма, сформированная в сумматоре 17 результатов интегрирования, пропорциональна сумме зазоров между кромками катушки 5 и крышками 2. При этом относительное положение катушки 5 определяется как п - А1 А1 -ЬА2 и вычисляется в блоке 18. Генераторы 11 и 13 тока формируют ток с значением 5-10 тД, что обеспечивает у ЭДСП с частотой собственных колебаний 5-10 Гц гарантированный прижим катушки 5 к крышкам 2. Время подачи тока не более 0,5 с. Время интегрирования не превышает 2с. Аналого-цифровой интегратор 14 может, быть построен на базе последовательно соединенных преобразователя напряжение частота и счетчика или аналогового интегратора и аналого-цифро.вого преобразователя. Блок 18 вычисления отношения (3) может быть выполнен или на базе микропроцессорных ИМС, или на базе программируемых постоянных запоминающих устройств или логических матриц, когда при подаче на их входы кодов А1, (А1 + А2).на выходе формируется код П. Схемы 22-26 построены на базе схем совпадений, объединяющих выходы соответствующих триггеров счетчика 21 и обеспечивающих формирование им-. пульсов управления необходимой длительности (см.фиг.2). Технико-экономический эффект при использовании предлагаемого изобретения образуется в основном за счет исключения искажений сейсморазведочных данных, возможных при использовании ЭДСП с смещенной от номинального положения KSTyuiкой. 7.
Ф1/Л/ Формула изобретения 1 .Устройство для определения положения катушки в электродинамическом сейсмоприемнике, содержашее первые генератор тока и аналоговый ключ, аналогоцифровой интегратор, блок управления и блок вычислений, при этом выход генератора тока соединен через аналоговый ключ с входом сейсмоприемника, соединенным с входом аналого-цифрового интегратора, выхэды блока управления соединены с входами управления аналогового ключа, аналого-цифрового интегратора и блока вычислений, отличающе ее я тем, что, с целью повышения точности, в устройство введены вторые генератор тока и аналоговый ключ, два регистра памяти и цифровой сумматор, причем выход второго генератора тока через второй аналоговый ключ соединен с входом сейсмоприемника, информационные выходы аналого-цифрового интегратора соединены с информационными входами регистров памяти, выходы которых соединены с входами цифрового су)матора, выходы которого и выходы одного из регистров памяти соединены с входами блока вычислений, а выходы блока управления соединены с входами управления второго аналогового ключа и регистров памяти. . 2.Устройство по П.1, отличающееся тем, что, с целью упрощения, блок управления содержит генератор импульсов, подключенный к входу счетчика, выходы которого через формирователи сигналов соединены с соответствующими выходами блока управления.
Пуск
{О открыт П
I I
l/HTerpu рова Hue -
Запись В .15 J т Крит cffpoc if
интегрировамие:
SanuctSjs Ьы числение ej8
иг. г
П
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения степени затухания электродинамического сейсмоприемника | 1988 |
|
SU1626237A1 |
| Устройство для определения степени затухания измерительных магнитоэлектрических преобразователей | 1988 |
|
SU1628028A1 |
| Устройство для обеспечения заданного коэффициента преобразования электродинамического сейсмоприемника | 1987 |
|
SU1548766A1 |
| Многоканальный интерполятор функций | 1986 |
|
SU1361588A1 |
| Устройство для решения задач оптимального управления | 1985 |
|
SU1327135A1 |
| Устройство для обмена информацией между цифровой и аналоговой вычислительными машинами | 1986 |
|
SU1348844A1 |
| Устройство для определения спектральных коэффициентов разложения случайного процесса по функциям Хаара | 1980 |
|
SU935814A1 |
| Устройство для определения коэффициентов разложения корреляционной функции по системе ортонормированных базисных функций | 1985 |
|
SU1287196A1 |
| Способ аналого-цифрового преобразования и устройство для его осуществления | 1986 |
|
SU1473083A1 |
| Аналого-цифровая вычислительная система и аналоговая вычислительная машина (ее варианты) | 1983 |
|
SU1259300A1 |
Изобретение относится к геофизическому приборостроению и предназначено дляиспользования в средствах контроля при изготовлении и эксплуатации электродинамических сейсмоприемников. Цель изобретения - повышение точности. Введением вторых генераторов тока и аналогового ключа обеспечивается возможность отклонения катушки в обе стороны от положения равновесия, а введение двух регистров памяти и цифрового сумматора позволяет автоматизировать процесс вычисления относительного положения катушки электродинамического сейсмоприемника. 1 з.п.ф-лы, 2 ил.
| Береза Г.В | |||
| Проверка и регулировка сейсмической аппаратуры | |||
| М.: Госпотехиздат, 1959.Авторское свидетельство СССР N! 1413570 | |||
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
