Изобретение относится к транспортному машиностроению, в частности к сочлененным транспортным средствам, снабженным устройством для предотвращения их складывания.
Цель изобретения - повышение эксплуатационной надежности.
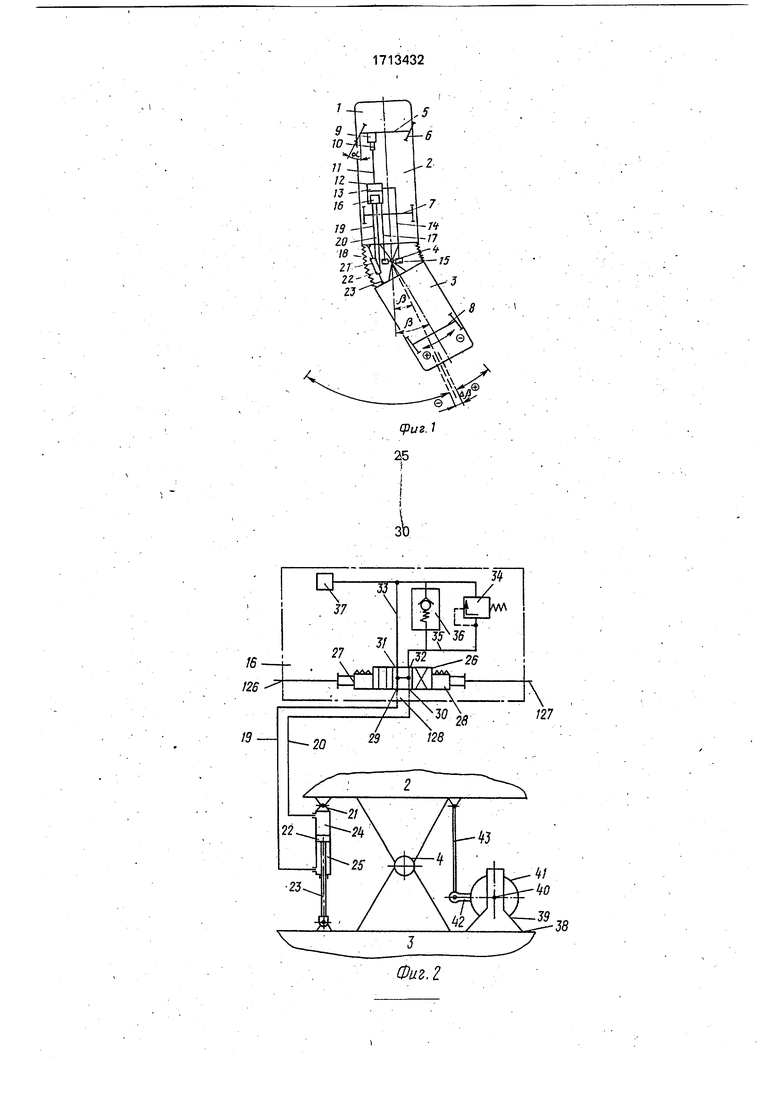
На фиг. 1 представлено сочлененное транспортное Средство, снабженное устройством для предотвращения складывания,- вид в плане; на фиг. 2 - схема управления силовым гидроцилиндром; на фиг. 3 - датчик, содержащий подвижный и неподвижный элементы; на фиг. 4 - подвижный элемент датчика угла а поворота передних управляемых колес; на фиг. 5 подвижный элемент датчика угла относительного смещения звеньев транспортного средства; на фиг. 6 - подвижный элемент
датчика с отверстиями, расположенными согласно коду Грея; на фиг. 7 - блок-схема устройства; на фиг.8 и 9 - схема блока оценки углового положения, примеры исполнения; на фиг. 10-схема цепи контроля выходных сигналов блока оценки углового положения. Сочлененное транспортное средство 1 включает в себя переднее 2 и заднее 3 звенья, связанные между собой шарниром 4. Передние колеса 6 переднего звена 2 расположены на оси 5 и выполнены управляемыми. На фиг. 1 обозначены угол а поворота передних колес и угол относительно/о смещения звеньев транспортного средства. Задняя ось 7 переднего звена 2 является неповоротной. Ось 8 заднего звена 3 может быть выполнена поворотной или неповоротной. Механизм 9 рулевого управления снабжен датчиком 10
угла поворота передних управляемых колес, который посредством электрической цепи 11 соединен с блоком 12 управления, в состав которого входит блок 13 оценки углового положения. Посредством цепи 14 к блоку 13 оценки углового положения подключен датчик 15 углового относительного смещения звеньев. Блок 12 управления включает в себя также блок 16 привода системы блокировки.
Блок 16 связан линией 17 с датчиком 18 направлени1я изменения угла относительного смещения звеньев транспортного средства. К блоку 16 посредством гидромагистралей 19 и 20 присоединен гидроцилиндр 21, корпус 22 которого шарнирно связан с передним звеном 2 транспортного средства 1. Шток 23 гидроцилиндра 21 шарнирно соединен с задним звеном 3. Гидроцилиндр 21 имеет надпоршневую полость 24 и штоковую полость 25.
Гидроцилиндр 21 связан, магистралями 19 и 20 с трехпозиционным четырехлинейным гидрораспределителем 26, золотник 27 которого снабжен электромагнитами 28, подключенными к блоку 13 оценки углового положения. Гидрораспределитель 26 имеет входы 29 и 30 и выходы 31 и 32, В гидросистему также включены магистраль 33, клапан 34 ограничения давления, магистраль 35, обратный клапан 36 и резервуар 37.
На консоли 38 заднего звена 3 закреплен кронштейн 39, в котором установлены подшипники 40. В подшипниках 40 размещен второй подвижный элемент41, который через качалку 42 и штангу 43 шарнирно соединен с передним звеном 2. Подвижные и неподвижные элементы датчиков 10 и 15 соответственно угла поворота и углового относительного смещения звеньев выполнены одинаковыми. На подвижных элементах 41 выполнены отверстия, расположенные определенным образом на боковых поверхностях 44 и 45. На неподви кных элементах установлены источники 46 света, которые расположены со стороны боковой поверхности 44 подвижного элемента 41. Кроме того, на неподвижных элементах установлены фотоэлементы 47 со стороны боковой поверхности 45 подвижного элемента 41. На неподвижных элементах установлены также дополнительные источник 48 света и напротив фотоэлемент 49, которые преднаэначены для считывания кодового поля контроля. Подвижный элемент 41 охвачен неподвижным элементом 50.
На подвижном элементе 41 датчика углового относительного смещения звеньев транспортного средства расположено кодовое поле 51, на котором по шести дугам
предусмотрены шесть рядов 52-57 отверстий, расположенныхсогласно коду Грея. На данном элементе имеется также ряд 58 отверстий, которые представляют собой кодовое поле 59 контроля: Комбинация рядов 52-57 отверстий делит весь диапазон угла /3 на угловых участка 60.
Аналогично на подвижном элементе датчика 10 угла поворота управляемых колес весь диапазон угла а разделен на угловых участка. Элемент поворачивается вокруг оси 62. На подвижном элементе 63 имеются участки 64, которым всегда соответствует блокировка звеньев, кодового
5 поля 65, на шести дугах которого расположены ряды 66-71 отверстий и ряд 72 отверстий, представляющие собой кодовое поле 73 контроля. Отверстия в рядах 66-71 расположены согласно коду Грея. В ряду 72
0 отверстий отверстия 74 выполнены на разделейном на равные участки подвижном элементе и расположены на одном участке полностью, а на соседних с ним участках частично. Таким образом, зона 75 не дости5 гает границ участка.
Датчик 15 углового относительного рмещения звеньев содержит схему 76 согласования и блок 77 запитки линии, второй выход 78 блока 77 запитки является выходом контрольного сигнала, а первый выход 79 - выходом сигнала информации. Второй выход 78 линией 80 связан с вторым входом 81, а первый выход 79 линией 82 - с первым входом 83 блока 84 приема с линии, который
5 имеет два выхода 85 и 86. Выход 85 служит для передачи сигнала контрольного кода, а выход 86 - для сигнала информации. Выход 86 через линию 87 передачи информации подключен к второму входу 90 блока 12 уп равления. Выход 85 через линию 88 передачи информации подключен к четвертому входу 89 блока 12 управления. На)одящийся между блоком 13 оценки углового положения и блоком 16 привода системы блокировки участок блока 12 управления выполнен 6 виде схемы 91 контроля.
Датчик 10 угла поворота содержит связанную цепью 92 с фотоэлементами схему
93 согласования и блок 94 запитки линии с
двумя выходами 95 и 96, которые посредством цепей 97 и 98 соединены с входами 99 и 100 блока 101 приема с линии, выходы 102 и 103 которого, посредством цепей 104 и 105 5 связаны с пятым входом 106 и первым входом 107блока 12управления. Блок 12управления имеет устройство 108 памяти фиксированной программы, четыре информационных входа которого идентичны входам 90, 89, 106 и 107 блока 12 управления.
Устройство 108 образует блок оценки углового положения, на первом выходе 109 которого появляется сигнал при отклонении с отрицательным знаком, на втором выходе
110появляется сигнал при взаимном совпадении, на третьем выходе 111 появляется выходной сигнал при отклонении с положительным знаком, а на четвертом выходе 112 появляется сигнал ошибки. Выходы 109 и
111связаны с входами 113 и 114 усилителей 115 и 116 мощности, выходы 117 и 118 которых подключены к входам блока 16. Входы 119-121 контрольного блока 122 соединены с выходами блока 108, а входы 123 и 124 - с выходами 117.И 118. Контрольный блок 122 имеет выход 125 сигнала ошибки.
Блок 16 входами 126 и 127 соединен с выходами 117 и 118 усилителей мощности. Третий вход блока 16 привода системы блокировки идентичен третьему входу 128 блока 12 управления. Линиями 129 и 130 выходы 125 и 112 связаны с входами 131 и 132 контрольного блока 133, к одному выходу 134 которого подключен главный выключатель 135, а к другому выходу 136 - прибор 137 выдачи сигнала тревоги.
Блок 13 оценки углового положения может иметь в своем составе (фиг. 8) преобразователь 138 кода, который преобразует код Грея в двоичный код. Его выход 139 соединен с входом 140 блока 141 сравнения, с входом 142 которого связан выход 143 преобразователя 144 кода. Преобразователи 138 и 144 кодов связаны с входами 107 и 90. Три выхода блока 141 сравнения идентичны выходам 109-111 блока 13 оценки углового положения. К выходу 139 подключен вход 145 инвертирующей логической схемы ИЛИ-НЕ 146, другой вход которой идентичен входу 106 блока 13 оценки углового положения. К выходу 143 подключен вход 147, инвертирующей логической схемы ИЛИ-НЕ 148, другой вход которой идентичен входу 89 блока 13 оценки углового положения. К выходам 149 и 150 инвертирующих логических схем ИЛИ-НЕ 146 и 148 подключены входы 151 и 152 логической схемы ИЛИ 153, выход которой идентичен выходу 112 блока 13 оценки углового положения.
Возможно и такое исполнение блока 13 оценки углового положения (фиг. 9), при котором он содержит преобразователи 138 и 144 кодов, связанные с блоком 141 сравнения, при этом входы преобразователей 138 и 144 кодов совпадают с входами 107 и 90 блока 13 оценки углового положения. К входу 107 подключен вход 154 схемы 155 проверки четности, другой вход которой идентичен входу 106 блока 13 оценки углового положения. Выход 156 схемы 155 проверки четности связан с одним из входов логической схемы ИЛИ 152. К входу 90 подключен вход 157 схемы 158 проверки четности, другой вход которой идентичен входу 89 блока 13 оценки углового положения. Выход 159 схемы 158 проверки четности соединен с одним из входов логической схемы ИЛИ 152, выход которой идентичен выходу 112
0 блока 13 оценки углового положения.
Цель, контролирующая выходные сигналы блока 13 оценки углового положения, т. е. выходы усилителей 115 и 116 мощности, включает элементы 160-162 световой сигнализации, подключенные к выходам 109-111. Выход 109 соединен с входом 163 схемы 164 согласования уровней, выход 165 которой подключен к входу 166 схемы 167 с двумя устойчивыми состояниями. Другой вход 168
0 схемы 167 связан с выходом 110, который также соединен с входом 169 схемы 170 с двумя устойчивыми состояниями, вход 171 которой подключен к выходу 172 схемы 173 согласования уровня, вход 174 которой сая5 зан с выходом 111. Выходы 175 и 176 схем
167 и 170 подключены к входам 177 и 178
логической схемы ИЛИ 179, выход которой
идентичен выходу 125 сигнала ошибки..
Устройство для предотвращения складывания сочлененного транспортного средства работает следующим образом.
Расположенные против отверстий в рядах 66-71 кодового поля 65 подвижного элемента 63 датчика 10 угла поворота шесть
5 фотоэлементов 47 выдают кодовый сигнал, соответствующий имеющейся комбинации отверстий. Сигнал через схему 93 согласоваг ния подается на блок 94 запитки линии. Расположенный против отверстий в ряду 72
0 кодового поля 73 контроля подвижного элемента 63 фотоэлемент 49 выдает контрольный сигнал, который через схему 93 согласования подается на блок 94 запитки линии. Аналогичные сигналы поступают от
КЛ1 датчика 15 углового относительного смещения звеньев.
. Сигналы отдатчиков 10 и 15 поступают на входы 107, 103, 90 и 89 устройства 108 памяти фиксированной программы, которое преобразует в соответствии с заложенной в него программой поступающие по каналам 90 и 107 сигналы по коду Грея в двоичный код и контролирует кодовые сигналы. Если при сравнении оказывается, что угол а поворота управляемых колес равен углу /3 относительного смещения звеньев, то на выходе 110 появляется сигнал и блок 16 привода системы блокировки не работает. Если угол а. больше угла , то сигнал появляется на выходе 109. При угле а меньше угла /3 сигнал появляется на выходе 111. В случае поступления сигналов на входы 126 или 127 блока 16 электромагнит 28 передвигает золотник 27 гидрораспределителя 26. Если, например, на входах 121 и 124 контрольного блока 122 присутствуют сигналы, то контрольный блок 122 не выдает сигнала ошибки. Если на обоих входах одновременно отсутствуют совпадающие сигналы, то на выходе 125 появляется сигнал ошибки, который приводит в действие прибор 137тревоги. При этом отключается главный выключатель 135. Формула изобретения 1. Устройство для предотвращения складывания сочлененного транспортного средства, включающего в,себя шарнирно соединенные звенья, переднее из которых выполнено с управляемыми.колесами, содержащее шарнирно соединенный со звеньями транспортного средства гидроцилиндр, связанный гидромагистралью с трехпозиционнымчетырехлинейнымгидрораспределителем, который связан с блоком управления, датчик угла поворота передних управляемых колес и датчик углового относительного смещения звеньев транспортного средства, соединенные с блоком управления, отличающе-еся тем, что, с целью повышения эксплуатационной надежности, датчик угла поворота передних управляемых колес содержит первый подвижный элемент, соединенный с управляемым колесом, и неподвижный элемент, датчик углового относительного смещения звеньев транспортного средства содержит второй подвижный элемент, соединенный с одним из звеньев транспортного средства, и неподвижный элемент, причем на подвижных элементах выполнены отверстия, расположенные согласно коду Грея, а на других элементах установлены источники света и фотоэлементы, при этом фотоэлементы обращены в сторону источников света и соединены электрической цепью с первым и вторым входами блока оценки углового положения, который содержит блок памяти, выполненный с возможностью создания двух типов выходных сигналов, первый из которых характеризует меньшую величину угла поворота передних управляемых колес по сравнению с величиной угла относительного смещения звеньев транспортного средства, превышающую заданное значение, а второй из которых характеризует большую величину угла поворота передних управляемых колес по сравнению с величиной угла относительного смещения звеньев транспортного средства, превышающую заданное значение, причем два выхода блока памяти соединены электрической цепью с элементами управления золотником гидрораспределителя. 2. Устройство поп. 1,отличающеес я тем, что подвижные элементы датчиков содержат управляющее кодовое поле, отверстия которого выполнены на разделенном на равные участки подвижном элементе и расположены на одном участке полностью, а на соседних с ним участках - частично, причем часть отверстий расположена на участках с четными порядковыми номерами, а другая часть - на участках с нечетными порядковыми номерами, при этом на неподвижных элементах установлены дополнительные источники света с одной стороны подвижных элементов и дополнительные фотоэлементы с другой стрроцы подвижных элементов, соединенные электрической цепью с третьим и четвертым входами блока оценки углового положения, четвертый выход которого несет сигнал ошибки.

| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 2004 |
|
RU2277488C1 |
| Стенд для испытания транспортных средств | 1988 |
|
SU1559257A1 |
| УСТРОЙСТВО ДЛЯ ВВОДА ЛЕКАРСТВА СО ВСПОМОГАТЕЛЬНОЙ ЭЛЕКТРОННОЙ СИСТЕМОЙ | 2009 |
|
RU2539995C2 |
| Система измерения и регулирования толщины листового материала | 1985 |
|
SU1354165A1 |
| Устройство диагностирования сходимости управляемых колес транспортного средства | 1987 |
|
SU1449861A1 |
| Устройство для измерения нестабильности угловой скорости | 1981 |
|
SU1013854A1 |
| Преобразователь перемещения в код | 1982 |
|
SU1059598A1 |
| Фотоэлектрический преобразователь угла поворота вала в код | 1981 |
|
SU959122A1 |
| Устройство для воздействия на угол излома оси шарнирно сочлененного транспортного средства (его варианты) | 1980 |
|
SU1258321A3 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2241867C2 |





Изобретение относится к транспортному машиностроению, в частности к сочлененным транспортным средствам.снабженным устройством для предотвращения их складывания. Целью изобретения является повышение эксплуатационной надежности. Устройство для предотвращения складывания сочлененного транспортного средства содержит датчик 10 угла поворота передних управляемых колес и датчик 15 углового относительного смещения звеньев. Датчики 10 и 15 выполнены идентичными и содержат подвижные и неподвижные элементы. На подвижных элементах выполнены отверстия согласно коду Грея, ~а на неподвижных элементах установлены источники света и фотоэлементы. Кодовые сигналы поступают на блок 12 управления, который включает в себя-блок 13 оценки углового положения и блок 16 привода системы блокировки. Исполнительным органом является гидроцили'ндр 21.1 3. п. ф-лы, 10 ил.СПс
xm--
.-I
/27
Фиг. 2
фиг. 3
Фиг Л
61
85
7 п Фиг, 6
63
Фиг,1
106
Фиг. 8
89
Фиг. 9
Фиг. Ю
| Патент США № 4344640, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
