Изобретение относится к транспорт- ному машиностроению и может быть использовано при диагностировании технического состояния транспортных средств, оборудованных оптической навигационной системой.
Цель изобретения - расширение функциональных возможностей.
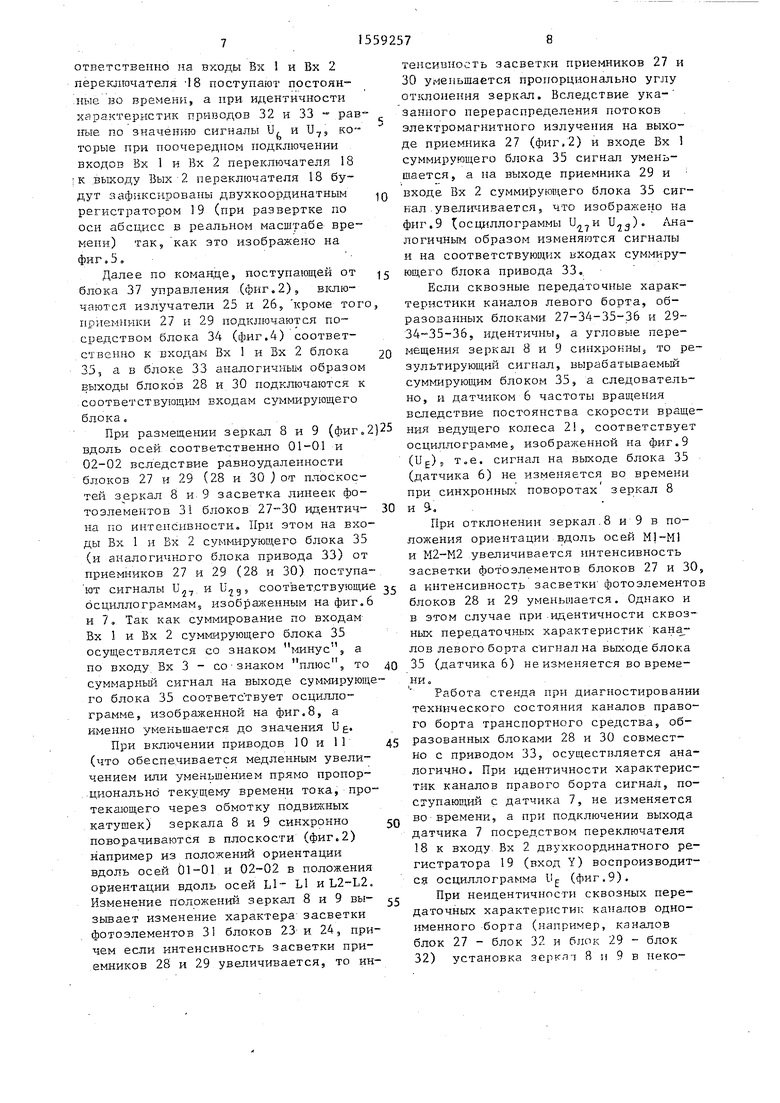
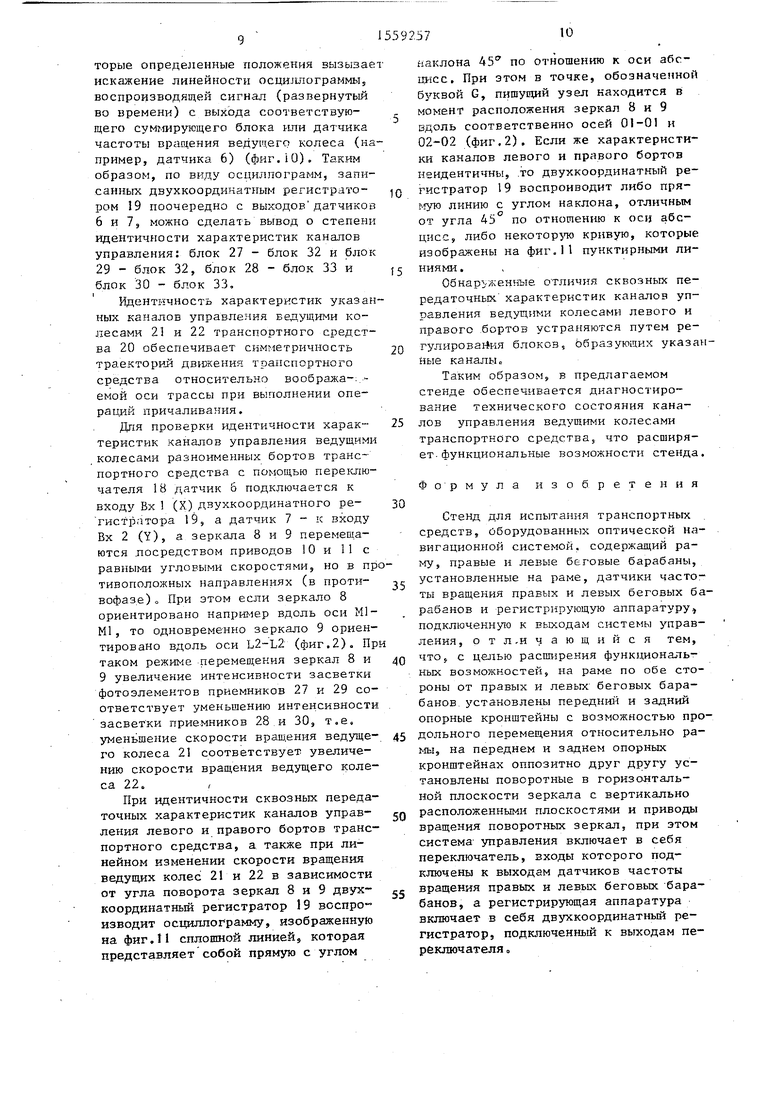
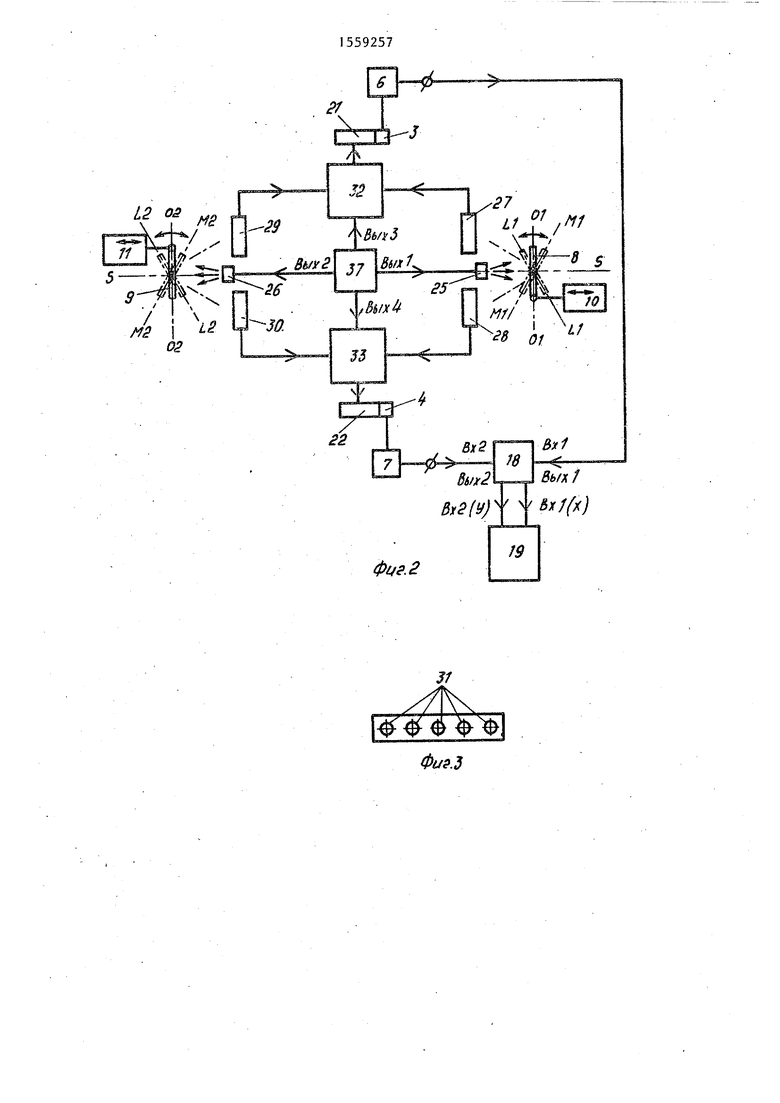
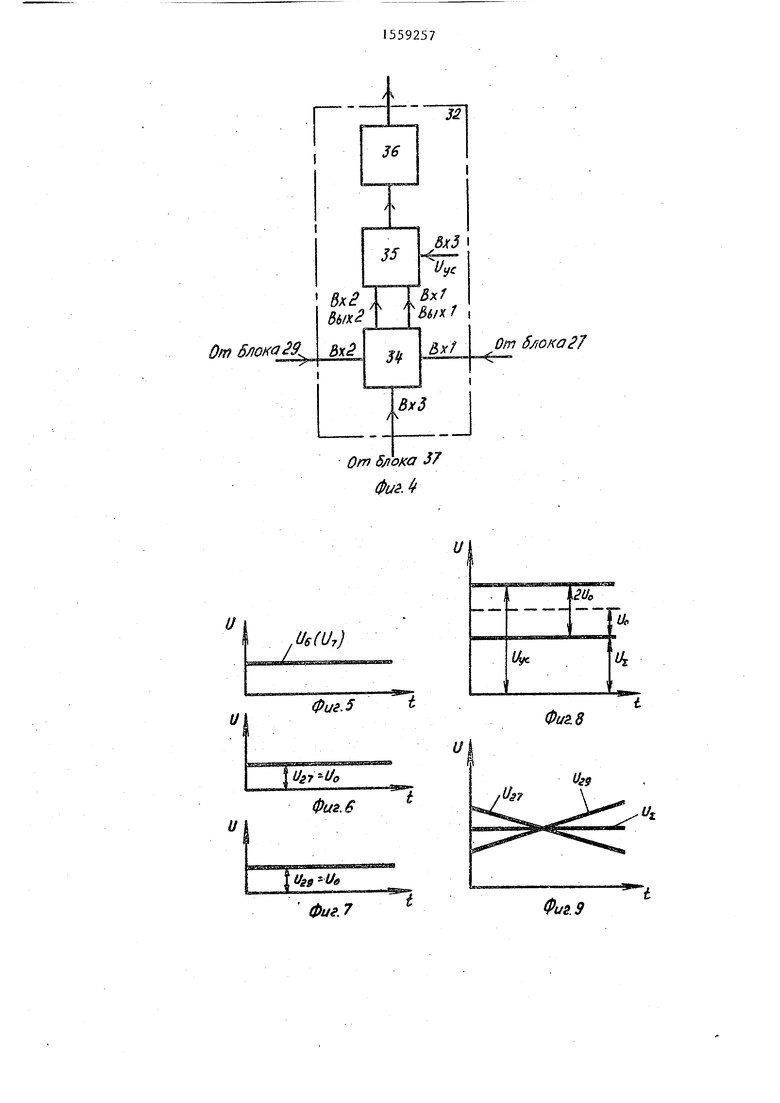
На фпг„1 изображен стенд,- общий вид; на фиг«2 - схема соединения элементов системы управления и регистрирующей аппаратуры с элементами оптической навигационной системы испытываемого транспортного средства; на фиг.З приемники электромагнитных колебаний оптической навигационной системы транспортного средства, общий вид; на фиг.4 - структурная схема контура управления привода ведущих колес транспортного средства; на фиг о 5 - осциллограмма сигналов на вы- ходах датчиков частоты вращения правых и левых беговых барабанов; на фиг.6 и 7 - осциллограммы сигналов на выходе приемников электромагнитных колебаний канала управления привода левого борта транспортного средства при расположении зеркал в поперечных плоскостях; на фиг„8 - осциллограмма сигнала на выходе суммирующего блока канала управления привода ведущих колес транспортного средства; на фиг.9- осциллограмма сигнала на выходе суммирующего блока канала управления привода ведущих колес транспортного средства и осциллограммы сигналов на выходе приемников электромагнитных колебаний канала управления привода левого борта транспортного средства
при синхронном угловом перемещении зеркал для случая, когда характеристики каналов управления односменных бортов идентичны; на фиг,10 - осциллограмма сигнала на выходе суммирующего блока канала управления привода ведущих колес транспортного средства и осциллограммы сигналов на выходе приемников электромагнитных колебаний этого канала управления при син5
0
5
.«
50
55
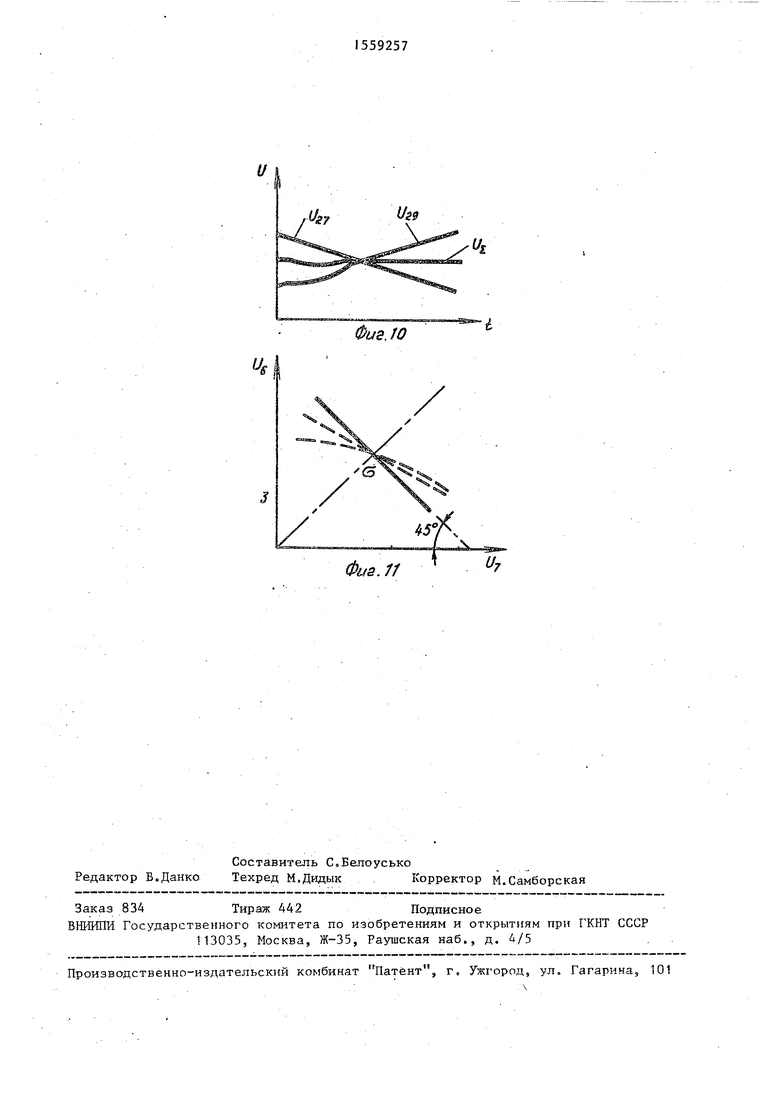
кронном угловом перемещении зеркал для сличая, когда характеристики каналов управления одноименных бортов различны; на фиг.11 - диаграммы, воспроизводимые двухкоординатным регистратором при подключении к его входам датчиков частоты вращения правых и левых беговых барабанов для случаев, когда характеристики каналов управления приводов разноименных бортов идентичны (сплошная прямая линия) и различны (пунктирная пряма и кривая линии) .
На раме 1 стенда установлены левые 2, 3 и правые 4, 5 беговые барабаны, кинематически соединенные с левым 6 и правым 7 датчиками частоты вращения. По обе стороны беговых барабанов смонтированы оппозитно расположенные переднее 8 и заднее 9 поворотные в горизонтальной плоскости зеркала, плоскости которых установлены вертикально. На раме стенда смонтированы приводы 10 и 11, подвижные звенья которых кинематически связаны с зеркалами 8 и 9. Зеркала 8 и 9 и приводы ± 10 и 11 прикреплены к раме 1 посредством переднего 12 и заднего 13 опорных кронштейнов, связанных с рамой посредством шарнирных узлов, допускающих продольное перемещение опорных кронштейнов 12 и 13. Приводы 10 и 11 выполнены в виде электродинамических возбудителей колебаний.
Выводы 14 и 15 обмоток подвижных катушек приводов 10 и 11 (при выполнении их на основе электродинамических возбудителей колебаний) предназначены для подключения к источникам электрического тока, например к генератору линейно нарастающего напряжения или к генератору сигналов синфра- низкочастотного (0,01-1,00 Гц) диапазона (на фиг.1 не изображены).
Выводы 1Ь и 17 соответственно датчиков 6 и 7 частоты вращения подключены (фиг.2) к входам Вх 1 и Ех 2 переключателя 1М, выходы Вых и Вых 2 которого подключены соотнетст
515
венно к входам Вх 1 (X) и Вх 2 (Y) двухкоординатного регистратора 19, входящего в состав регистрирующей аппаратуры. Переключатель 18 позволяет осуществить два режима работы:
подключить выводы 16 и 17 датчиков 6 и 7 частоты вращения соответственно к входам Вх и Вх 2 двухкоординатного регистратора 19 для воспроизведе- ния диаграммы, являющейся функцией двух сигналов, поступающих с выходов датчиков 6 и 1
подключить выборочно любой из выводов 3 6 или 17 к входу Вх 2 двухкоординатного регистратора 19 для воспроизведения осциллограммы, являющейся функцией одного из сигналов с выхода датчиков 6 или 7, а разверт- ка по оси абсцисс (Кх 1 или X) осу- ществляется в реальном масштабе времени специальным блоком, которым комплектуется двухкоординатный регистратор 19..
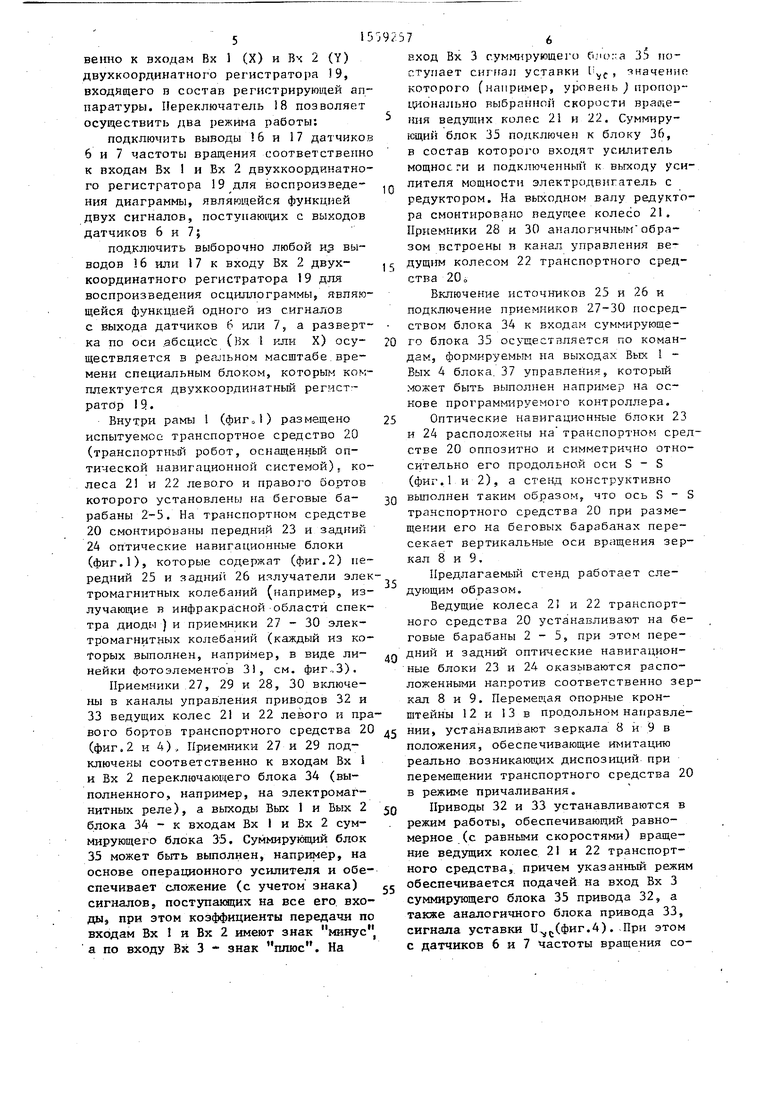
Внутри рамы I (фиг) размещено испытуемое транспортное средство 20 (транспортный робот, оснащенный оптической навигационной системой), колеса 21 и 22 левого и правого сортов которого установлены на беговые ба- рабаны 2-5. На транспортном средстве 20 смонтированы передний 23 и задний 24 оптические навигационные блоки (фиг.1), которые содержат (фиг.2) передний 25 и задний 26 излучатели элек тромагнитных колебаний (например, излучающие в инфракрасной области спектра диоды ) и приемники 27 - 30 электромагнитных колебаний (каждый из которых выполнен, например, в виде ли- нейки фотоэлементов 3), см. фиг.З).
Приемники 27, 29 и 28, 30 включены в каналы управления приводов 32 и 33 ведущих колес 21 и 22 левого и правого бортов транспортного средства 20 (фиг.2 и 4), Приемники 27 и 29 подключены соответственно к входам Вх i и Вх 2 переключающего блока 34 (выполненного, например, на электромагнитных реле), а выходы Вых 1 и Вых 2 блока 34 - к входам Вх 1 и Вх 2 суммирующего блока 35. Суммирующий блок 35 может быть выполнен, например, на основе операционного усилителя и обеспечивает сложение (с учетом знака) сигналов, поступающих на все его вхо- ды5 при этом коэффициенты передачи по входам Вх 1 и Вх 2 имеют знак минус а по входу Вх 3 знак плюс. На
S
92
lf,
20
5 о д
с Q
5
376
р.ход Вх 3 гуммирующего fneva 35 носкупает сигнал уставки Ivc, значение которого (например, уровень ) пропорционально выбранной скорости ния ведущих КОЛРС 21 и 22. Суммирующий блок 35 подключен к блоку 36, в состав которого входят усилитель мощности и подключенный к выходу усилителя мощности электродвигатель с редуктором. На выходном валу редуктора смонтировано ведущее колесо 21. Приемники 28 и 30 аналогичным образом встроены в канал управления ведущим колесом 22 транспортного средства 20 о
Включение источников 25 и 26 и подключение приемников 27-30 посредством блока 34 к входам суммируюше- го блока 35 осуществляется по командам, формируемым на выходах Вых 1 - Вых 4 блока 37 управления, который может быть выполнен например на основе программируемого контроллера.
Оптические навигационные блоки 23 и 24 расположены на транспортном срел- стве 20 оппозитно и симметрично относительно его продольной оси S - S (фиг.1 и 2), а стенд конструктивно выполнен таким образом, что ось S - S транспортного средства 20 при размещении его на беговых барабанах пересекает вертикальные оси вращения зеркал 8 и 9.
Предлагаемый стенд работает следующим образом.
Ведущие колеса 21 и 22 транспортного средства 20 устанавливают на беговые барабаны 2-5, при этом передний и задний оптические навигационные блоки 23 и 24 оказываются расположенными напротив соответственно зеркал 8 и 9. Перемещая опорные кронштейны 12 и 13 в продольном направлении, устанавливают зеркала 8 и 9 в положения, обеспечивающие имитацию реально возникающих диспозиций при перемещении транспортного средства 20 в режиме причаливания.
Приводы 32 и 33 устанавливаются в режим работы, обеспечивающий равномерное (с равными скоростями) вращение ведущих колес 21 и 22 транспортного средства, причем указанный режим обеспечивается подачей на вход Вх 3 суммирующего блока 35 привода 32, а также аналогичного блока привода 33, сигнала уставки (фиг.4). При этом с датчиков 6 и 7 частоты вращения соответственно на входы Вх I и Вх 2 переключателя 18 поступают постоянные во времени, а при идентичности характеристик приводов 32 и 33 - рав™ ные по значению сигналь U, и U7, ко- торые при поочередном подключении входов Вх 1 и Вх 2 переключателя 18 к выходу Вых 2 переключателя 18 будут зафиксированы двухкоординатным регистратором 19 (при развертке по оси абсцисс в реальном масштабе времени) так, как это изображено на фиг.5.
Далее по команде, поступающей от блока 37 управления (фиг.2), включаются излучатели 25 и 26, кроме того приемники 27 и 29 подключаются посредством блока 34 (фиг.4) соответ- ciвснно к входам Вх и Вх 2 блока 355 а в блоке 33 аналогичным образом выходы блоков 28 и 30 подключаются к соответствующим входам суммирующего блока,
При размещении зеркал 8 и 9 (фиг„2 вдоль осей соответственно 01-01 и 02-02 вследствие равноудаленности блоков 27 и 29 (28 и 30 ) от плоскостей зеркал 8 и 9 засветка линеек фотоэлементов 31 блоков 27-30 идентич- на по интенсивности. При этом на входы Вх 1 и Вх 2 суммирующего блока 35 (и аналогичного блока привода 33) от приемников 27 и 29 (28 и 30) поступают сигналы U27 и U-jgs соответствующие осциллограммам, изображенным на фиг.6 и 7 , Так как суммирование по входам Вх 1 и Вх 2 суммирующего блока 35 осуществляется со знаком минус, а по входу Вх 3 - со знаком плюс, то суммарный сигнал на выходе суммирующего блока 35 соответствует осциллограмме, изображенной на фиг.8, а именно уменьшается до значения U Е.
При включении приводов 10 и 11 (что обеспечивается медленным увеличением или уменьшением прямо пропорционально текущему времени тока, протекающего через обмотку подвижных катушек) зеркала 8 и 9 синхронно поворачиваются в плоскости (фиг.2) например из положений ориентации вдоль осей 01-01 и 02-02 в положения ориентации вдоль осей L1- Ы и L2-L2. Изменение положений зеркал 8 и 9 вы- зывает изменение характера засветки фотоэлементов 31 блоков 23 и 24, причем если интенсивность засветки приемников 28 и 29 увеличивается, то интенсивность засветки приемников 27 и 30 уменьшается пропорционально углу отклонения зеркал. Вследствие указанного перераспределения потоков электромагнитного излучения на выходе приемника 27 (фиг.2) и входе Вх 1 суммирующего блока 35 сигнал уменьшается, а на выходе приемника 29 и входе Вх 2 суммирующего блока 35 сиг- вал увеличивается, что изображено на фиг.9 tосциллограммы ), Аналогичным образом изменяются сигналы и на соответствующих входах суммирующего блока привода 33.
Если сквозные передаточные характеристики каналов левого борта, образованных блоками 27-34-35-36 и 29- 34-35-36, идентичны, а угловые перемещения зеркал 8 и 9 синхронны, то результирующий сигнал, вырабатываемый суммирующим блоком 35, а следовательно, и датчиком 6 частоты вращения вследствие постоянства скорости вращения ведущего колеса 21, соответствует осциллограмме, изображенной на фиг.9 (UE)5 т„е. сигнал на выходе блока 35 (датчика 6) не изменяется во времени при синхронных поворотах зеркал 8 и 9-.
При отклонении зеркал 8 и 9 в положения ориентации вдоль осей Ml-Ml и М2-М2 увеличивается интенсивность засветки фотоэлементов блоков 27 и 30 а интенсивность засветки фотоэлементо блоков 28 и 29 уменьшается. Однако и в этом случае при идентичности сквозных передаточных характеристик каналов левого борта сигнал на выходе блока 35 (датчика 6) не изменяется во време Ио
Работа стенда при диагностировании технического состояния каналов правого борта транспортного средства, образованных блоками 28 и 30 совместно с приводом 33, осуществляется аналогично. При идентичности характеристик каналов правого борта сигнал, поступающий с датчика 7, не изменяется во времени, а при подключении выхода датчика 7 посредством переключателя 18 к входу Вх 2 двухкоординатного регистратора 19 (вход Y) воспроизводится осциллограмма U (фиг.9).
При неидентичности сквозных передаточных характернотик каналов одноименного борта (например, каналов блок 27 - блок 32 и блок 29 - блок 32) установка зеркт 8 и Q в некоторые определенные положения вызывае искажение линейности осциллограммы, воспроизводящей сигнал (развернутый во времени) с выхода соответствующего суммирующего блока или датчика частоты вращения ведущего колеса (например, датчика 6) (фиг.10). Таким образом, по виду осциллограмм, записанных двухкоордичатным регистрато- ром 19 поочередно с выходов датчиков 6 и 7, можно сделать вывод о степени идентичности характеристик каналов управления: блок 27 - блок 32 и блок 29 - блок 32, блок 28 - блок 33 и блок 30 - блок 33,
Идентичность характеристик указанных каналов управления ведущими колесами 21 и 22 транспортного средства 20 обеспечивает симметричность траекторий движения транспортного средства относительно вообража- - емой оси трассы при выполнении операций причаливания.
Для проверки идентичности харак™ теристик каналов управления ведущими колесами разноименных бортов транспортного средства с помощью переключателя 18 датчик б подключается к входу Вх 1 (X) двухкоординатного ре- гистратора 19, а датчик 7 - к входу Вх 2 (Y), а зеркала 8 и 9 перемешаются посредством приводов 10 и 11 с равными угловыми скоростями, но в пртивоположных направлениях (в проти- вофазе)о При этом если зеркало 8 ориентировано например вдоль оси Ml- Ml, то одновременно зеркало 9 ориентировано вдоль оси L2-L2 (фиг.2). Пр таком режиме перемещения зеркал 8 и 9 увеличение интенсивности засветки фотоэлементов приемников 27 и 29 соответствует уменьшению интенсивности засветки приемников 28 и 30, т.е. уменьшение скорости вращения зедуще- го колеса 21 соответствует увеличению скорости вращения ведущего колеса 22.
При идентичности сквозных передаточных характеристик каналов управ- ления левого и правого бортов транспортного средства, а также при линейном изменении скорости вращения ведущих колес 21 и 22 в зависимости от угла поворота зеркал 8 и 9 двух- координатный регистратор 19 воспроизводит осциллограмму, изображенную на фиг.П сплошной линией, которая представляет собой прямую с углом
наклона 4517 по отношению к оси абсцисс. При этом в точке, обозначенной буквой G, пишущий узел находится в момент расположения зеркал 8 и 9 вдоль соответственно осей 01-01 и 02-02 (фиг.2). Если же характеристики каналов левого и правого бортов неидентичны, то двухкоординатный регистратор 19 воспроиводит либо пря- мую линию с углом наклона, отличным от угла 45° по отношению к оси абсцисс, либо некоторую кривую, которые изображены на фиг.П пунктирными линиями .
Обнаруженные отличия сквозных передаточных, характеристик каналов управления ведущими колесами левого и правого бортов устраняются путем ре- гулирован-ия блоков, Образующих указаные канальи
Таким образом, в предлагаемом стенде обеспечивается диагностирование технического состояния каналов управления ведущими колесами транспортного средства, что расширяет функциональные возможности стенда
Формула изобретения
Стенд для испытания транспортных средств, Оборудованных оптической навигационной системой, содержащий раму, правые и левые беговые барабаны, установленные на раме, датчики частоты вращения правых и левых беговых барабанов и регистрирующую аппаратуру подключенную к выходам системы управления, отл-и чающийся тем, что, с целью расширения функциональных возможностей, на раме по обе стороны от правых и левых беговых барабанов установлены передний и задний опорные кронштейны с возможностью продольного перемещения относительно рамы, на переднем и заднем опорных кронштейнах оппозитно друг другу установлены поворотные в горизонтальной плоскости зеркала с вертикально расположенными плоскостями и приводы вращения поворотных зеркал, при этом система управления включает в себя переключатель, входы которого подключены к выходам датчиков частоты вращения правых и левых беговых барабанов, а регистрирующая аппаратура включает в себя двухкоординатный регистратор, подключенный к выходам переключателя о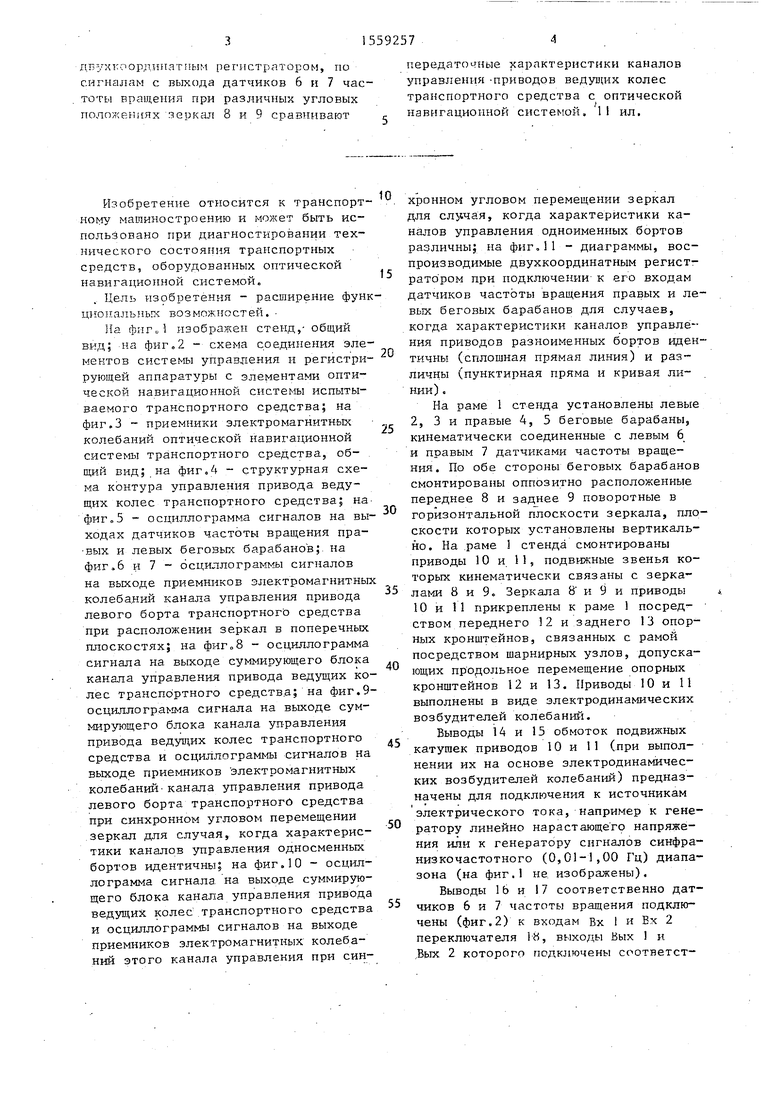
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления транспортным средством | 1987 |
|
SU1550480A1 |
| Стенд для испытания транспортных средств | 1987 |
|
SU1462142A1 |
| ОПТОЭЛЕКТРОННАЯ СИСТЕМА БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ В ДВИЖЕНИИ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК ЖЕЛЕЗНОДОРОЖНОЙ КОЛЕИ. ОПТОЭЛЕКТРОННЫЙ ДАТЧИК БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ И ИЗНОСА РЕЛЬСА | 1995 |
|
RU2142892C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2013 |
|
RU2529626C2 |
| Стенд для испытания тормозов транспортных средств | 1987 |
|
SU1474506A1 |
| Стенд для испытания колесных транспортных средств | 1990 |
|
SU1712813A1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| Локомотивная система определения скорости движения и пройденного пути | 2023 |
|
RU2808862C1 |
| Устройство для регулирования частоты вращения тяговых двигателей прицепа | 1979 |
|
SU935332A2 |
Изобретение относится к транспортному машиностроению и может быть использовано при диагностировании технического состояния транспортных средств, оборудованных оптической навигационной системой. Цель изобретения - расширение функциональных возможностей. На раме 1 установлены левые 2 и 3 и правые 4 и 5 беговые барабаны, кинематически соединенные с датчиками 6 и 7 частоты вращения, выходы которых через переключатель соединены с входами двухкоординатного регистратора. По обе стороны от беговых барабанов на опорных кронштейнах 12 и 13 оппозитно друг к другу установлены поворотные в горизонтальной плоскости зеркала 8 и 9 с вертикально расположенными плоскостями. По диаграммам, воспроизводимым двухкоординатным регистратором, по сигналам с выхода датчиков 6 и 7 частоты вращения при различных угловых положениях зеркал 8 и 9 сравнивают передаточные характеристики каналов управления приводов ведущих колес транспортного средства с оптической навигационной системой. 11 ил.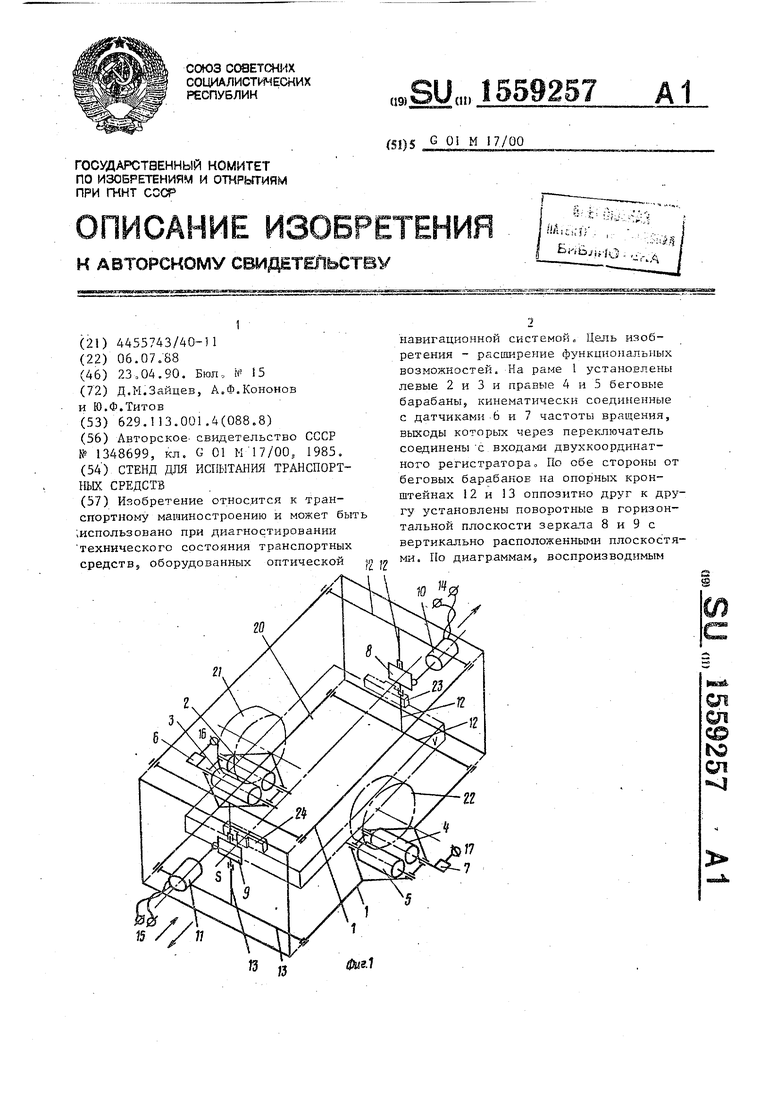
Фиг.З
От блока 29
U
U
U
От блока 27
От 5лока 37 Фиг. If
&
и
Физ. П
Фие./о
| Стенд для испытания автомобилей | 1985 |
|
SU1348699A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
