Изобретение относится к объемному гидроприводу, а именно к объемным гидропередачам строительных и дорожных машин, где необходимо автоматическое регулирование гидропривода в зависимости от изменения нагрузки на рабочих органах машине.
Цепь изобретения - обеспечение наиболее полного использования мощности приводного двигателя и повышение надежности гидропередачи за счет увеличения числа ступеней регулирования подачи насосного агрегата.
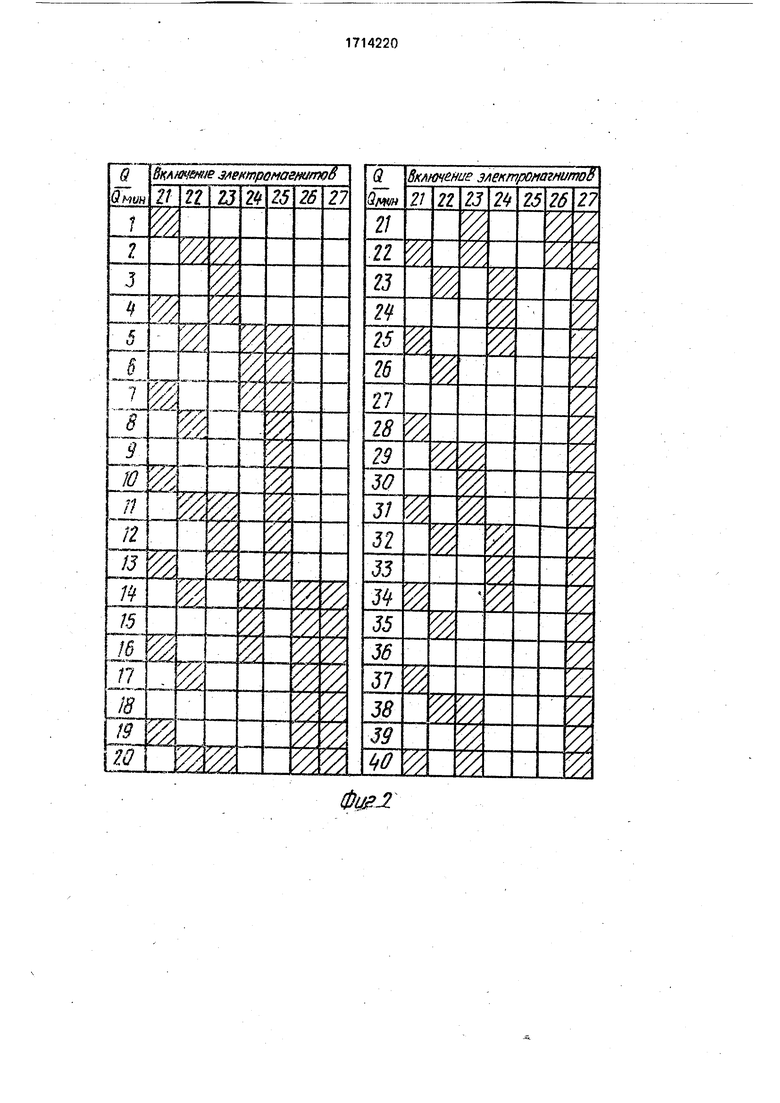
На фиг, 1 представлена конструктивная схема гидропередачи с регулято|эом мощности; на фиг. 2 таблица изменения подачи насосного агрегата в зависимости от комбинаций включения электромагнитов распределителей; на фиг. 3 - график изменений суммарной подачи насосного агрегата в зааисймости от перепада давлений в гидромагмстралях.
Объемная гидропередача содержит пятисекцчонкый (плтипоточный) насосный агрегат 1, гидромотор 2, соединенный напорной 4 и сливной 5 гидромагистралями через управляющий распределитель 3 с насосным агрегатом 1 в замкнутый контур. Между гидромагистрзлями включены блоки предохранительных 6 и обратных 7 клапанов (по доа клапана) и фильтр 8 (через блок обратных клапанов 7). Регулятор мощности включает датчик 9 и 10 давления, установленные соответственно в напорной 4 и сливной 5 гидромагистралях, электронный блок 11 управления, представляющий собой программируемый контроллер, например, на базе микропроцессора, исполнительное устройство, состоящее из электрогидравлических распределителей12-15, установленных между напорной 4 и сливной S гидромагистралями и соответствующими четырьмя секциями насосного агрегата 1.
Пятипоточный насосный агрегат 1 состоит из основных аксиально-поршневых гидромашин 16 и 17, имеющих в наклонных блоках по два ряда поршней, и вспомогательного насоса 18 подпитки, связанных с приводным валом через зубчатое зацепление. На выходе насоса 18 установлен предохранительный клапан 19 и фильтр. Всасывающая магистраль насоса 18 и слив клапана 19 соединены с баком 20. Электрические выходы датчиков 9 и 10 давления соединены с выходом электронного блока 11, а электромагниты 21-27, управляющие соответствующими распределителями 1215, соединены с соответствующими выходами электронного блока 11 (линии соединения не показаны).
Гидропередача работает следующим образом.
Приводной двигатель (не показан) вращает вал насосного агрегата 1 и через зубчатое зацепление-основные насосы 16 и 17 и вспомогательный насос 18. Наклонные блоки аксиально-поршневых гидромашин 16 и 17 имеют по два ряда поршней, образуя четыре секции, рабочие объемы которых qi,
0 q2, рз, Q4 подобраны, например, в соотношении 1:3:9:27. Потоки рабочей жидкости от четырех секций при нейтральном положении распределителей 12-15 (электромагниты 21-27 выключены, закольцованы и
5 соединены со сливной магистралью 5. При различных комбинациях включения электромагнитов 21-27 (фиг. 2) можно получить 40 неповторяющихся значений суммарной подачи, закольцовывая, складывая, вычитая
0 четыре потока от основных гидромашин 16, 17, величины которых образуют геометрическую прогрессию со знаменателем 3 (1+3+9+27 40).
Например, для установления ступени №
5 17 подачи необходимо включить электромагниты 22, 26, 27. При этом меньший рабочий объем qi (внутренний ряд поршней) гидромашины 16 будет включен на вычитание потоков распределителем 12, а больший
0 рабочий объем q2 (наружный ряд поршней), управляемый распределителем 13, остается закольцованным. Аналогично для гйдромашины 17. Внутренний ряд, соответствующий меньшему рабочему объему q3,
5 включен распределителем 14 на вычитание, наружный ряд распределителем 15 - насуммирование. Результирующее значение подачи определяется по формуле Q (-1 qi + О q2 - 1 qa + 1 q4) n,
0 где qi,... 4 - рабочие объемы ссответствующих секций;
n - частота вращения валов гидромашин.
Учитывая, что qi: q2; qa: q4 1:3:9:27, то
5 Q 170амин,
где Омин - qi n - минимальное значение подачи (на ступени 1).
Комбинации включения электромагнитов, соответствующие различным ступеням
0 регулирования подачи, занесены в программу электродного блока. Таким образом, устанавливая рукояткой управления на блоке 11 исходную ступень производительности насосного агрегата 1, оператор подает соответствующий расход Q в напорную магистраль 4. При переключении распределителя 3 из нейтрального положения гидромотор 2 получает вращение. Насос 18 через фильтр 8 и блок обратных клапанов 7 компенсирует утечки рабочей жидкости из закрытого контура, образованного насосным агрегатом 1, гидромотором 2 и магистралями 4 и 5. Давление лодпитки настраивается клапаном 19.
При наличии момента сопротивления на валу гидромотора 2 (например, к рабочему органу машины приложена нагрузка), в гидромагистралях 4 и 5 возникает перепад давления Р, Электрические сигналы от датчиков 9 и tO, соответствующие уровням давлений в гидромагистралях 4 и 5, поступа ют на вход электронного блока 11. На основании 0азности сигналов от датчиков 9 и 10, соответствующей перепаду Р, в блоке 11 вычисляется значение требуемого расхода по формуле
- P-Q NHOM,
где N ном - номинальная мощность приводного двигателя.
Вычисленное значение Q округляется до ближайшего из сорока возможных значе ний подач насосного агрегата 1. Затем формируются сигналы на выходе электронного блока 11 на включение соответствующей комбинации электромагнитов согласно таблице, занесенной в программу электронного блока 11,
Управляющие сигналы выдерживаются на выходах электронного блока 11 в течение заданного интервала времени ДТ, величина которого определяется быстродействием электронного блока 11 и электрогидравлических распределителей 12-15, Затем на основании действительного перепада Р вычисления повторяются и формируются на следующий период АТ сигналы, соответствующие новой комбинации включения электромагнитов 21-27 и т,д.
При достижении давлений в любой из магистралей 4 и 5 уровня настройки предохранительных клапанов 6 электромагниты 21-27 отключаются и распределители 12-15 переводятся в нейтральное положение.
Таким образом, идеальная гипербола постоянной мощности (фиг. 3, непрерывная линия) заменяется с высокой точнбстью ступенчатой зависимостью (фиг, 3. ломаная линия).
- Предлагаемая гидропередача позволяет обеспечить отбор постоянной мощности приводного двигателя. Применение в качестве регулятора мощности программируемого контроллера, управляющего четырьмя электрогидравлическими распределителями, позволяет реализовать без усложнения конструкции насосного агрегата сорок ступеней регулирования подачи и свести к минимуму отклонения от требуемого закона регулирования.
Формула изобретения Объемная тдропере Дача, содержащая пятмпоточный насосный агрегат, гидромотор соединенный гидромагистралями через управляющий распределитель с насосным агрегатом, предохранительные и обратные клапаны, фильтр, установленные в гидромагистралях, регулятор мощности, включающий в себя первый датчик давления, установленный в напорной магистрали, блок управления, связанный с датчиком давления, исполнительное устройство, связанное с блоком управления и секциями насосного агрегата,
отличающаяся тем, что, с целью обеспечения наиболее полного использования мощности приводного двигателя и повышения надежности гидропередачи за счет увеличения числа ступеней регулирования подачи насосного агрегата, регулятор мощности снабжен вторым датчиком давления, установленным в сливной гидромагистрали и подключенным к блоку управления, который выполнен в виде электронного программного устройства, а исполнительное устройство - в виде четырех трехпозиционных четырехлинейных электрогидравлических распределителей, установленных на четырех секциях насосного агрегата, причем в нейтральном положении распределителей вход и йыход соответствующих секций соединены со сливной магистралью, а при переключении из нейтрального положения выход соединяется с напорной магистралью, а вход - со сливной, или наоборот.
Ф(-3.
012
Ступени nodaw Фиг.З
39 0

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИРОВАНИЯ ГИДРОПРИВОДОВ И ГИДРОПЕРЕДАЧ | 2012 |
|
RU2495284C1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| ЛЕСНАЯ МАШИНА | 1995 |
|
RU2118262C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ГИДРООБЪЕМНЫЙ ПРИВОД ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА, СИСТЕМА АВТОМАТИЧЕСКОЙ СМЕНЫ РАБОЧЕЙ ЖИДКОСТИ ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА, НАСОСНЫЙ АГРЕГАТ ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА, СИСТЕМА КОНДИЦИОНИРОВАНИЯ И РЕВЕРСА ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА И ГИДРОМОТОРНЫЙ АГРЕГАТ ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2108507C1 |
| Транспортное средство Исина | 1985 |
|
SU1294646A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2003 |
|
RU2246615C1 |
| ГИДРООБЪЕМНАЯ ПЕРЕДАЧА | 2004 |
|
RU2274787C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2002 |
|
RU2209967C1 |

Изобретение обеспечивает наибол(эе полное использование мощности приводного двигателя и повышение надежности гидропередачи за счет увеличения числа ступеней.регулирования поДачи насосного агрегата. Гидромотор 2 соединен ч^ез уп-25fF<R8W иj /f э/>&5ктро- нагнитан19Пю
| ,ПатентФРГ№ 1273947, кл | |||
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
