Изобретение относится к области машиностроения, в частности к механизмам регулирования передаточного отношения.
Известны зубчатые коробки перемены передач, фрикционные вариаторы, гидропередачи и т. д. Все эти устройства имеют известные достоинства и недостатки.
Наиболее близким по устройству и выполняемым функциям является трансформатор вращающего момента, описанный в журнале "Автомобильная промышленность" N 8 за 1991 г. в статье Сизова И.Д. "Трансформатор вместо муфты сцепления и коробки передач".
Трансформатор состоит из многопоточного фрикционного редуктора с распорными роликами и компенсацией скольжений от допусков на размеры параллельно работающих звеньев за счет упругой деформации ведомых ободьев промежуточных катков редуктора. Выходной вал редуктора соединен с водилом дифференциального вариатора, наружный барабан которого соединен с выходным валом трансформатора. На входном валу установлены три ведущих катка. Один каток установлен в редукторной части. Два катка с упругофрикционной передачей установлены с сервоприводом в вариаторной части. Внутренние выступы ступиц катков входят в винтовые прорези противоположной навивки в трубчатом входном валу. Внутри вала установлен сервопривод с ходовым винтом с правой и левой резьбой, на которой установлены ходовые гайки с выступами, входящими в пазы трубчатого вала. При вращении ходового винта гайки смещаются к середине, перемещая катки и пружину. Этим достигается ручное регулирование передаточного отношения с реверсированием.
Автоматическое регулирование передаточного отношения достигается винтовыми пазами трубчатого вала и пружиной при отводе ходовых гаек в крайнее положение.
Недостатком этого трансформатора является сложность изготовления и управления передаточным отношением.
Задачей изобретения является создание многопоточного конусного с упругофрикционной передачей механизма плавного автоматического регулирования передаточного отношения. Механизм обеспечивает большой диапазон регулирования в зависимости от величины момента на выходном валу с высоким КПД и без смазки фрикционных поверхностей.
Поставленная задача осуществляется соединением в единую кинематическую схему двух многопоточнык двухступенчатых конусных вариаторов с общим водилом. На этом водиле с обеих сторон установлены по условиям соседства спаренные основаниями конусы.
Вариатор со стороны входного вала имеет планетарную схему с неподвижным, прикрепленным к корпусу ободом, охватывающим спаренные конусы, установленные на водиле. Вариатор со стороны выходного вала имеет дифференциальную схему, а его охватывающий обод соединен с выходным валом и контактирует со спаренными конусами другой стороны водила.
При таком устройстве трансформатора вращение от ведущего катка со стороны входного вала передается через конусы к водилу, от него к спаренным конусам другой стороны, к охватывающему ободу и к выходному валу, вращая его в сторону вращения входного вала. Вращение от второго ведущего катка передается через спаренные конусы, расположенные со стороны выходного вала, к охватывающему ободу и выходному валу, его в сторону, противоположную вращению входного вала.
Таким образом, на выходном валу складываются два противоположных вращения, зависимых от момента на выходном валу.
Циркуляция моментов в механизме связана с частотой вращения выходного вала. От двигателя момент по входному валу передается к ведущему катку дифференциального вариатора, а от него через спаренные конусы к охватывающему ободу и выходному валу.
Реактивный момент водила через спаренные конусы планетарного вариатора передается веющему катку, а от него через входной вал, соединяясь с моментом двигателя, передается на выходной вал. Этот циркулирующий момент обеспечивает полное использование мощности двигателя при различных режимах работы машины.
Устройство трансформатора показано на схемах и чертежах. На фиг.1 изображена схема продольного разреза трансформатора. На фиг. 2 показана конструкция ведущего катка с упругим ободом и устройством для создания сил прижатия. На фиг. 3 изображен охватывающий обод с упругим кольцом и устройством для создания сил прижатия.
На фиг. 1 номера позиций начинаются с кинематических звеньев в порядке передачи вращений. Со стороны входного вала звенья нумеруются цифрами, а такие же звенья со стороны выходного вала нумеруются цифрами со штрихами.
От ведущих катков 1 и 1' вращение передается конусам 2 и 2', спаренным основаниями с конусами 3 и 3'. Число спаренных конусов с каждой стороны водила определяется по условиях соседства. Конусы 3 и 3' контактируют с охватывающими ободьями 4 и 4' упругими кольцами. Спаренные конусы установлены на подшипниках и осях, закрепленных с двух сторон на водиле 5, выполненном в виде диска. Водило установлено на входном валу 6 на подшипнике 7 между ведущими катками. Входной вал 6 на подшипнике 8 установлен в корпусе 9. Охватывающий обод 4 неподвижно прикреплен к корпусу 9, а охватывающий обод 4' соединен с выходным валом 10. Выходной вал установлен в корпусе 9 на подшипнике 11. Спаренные конусы установлены на водиле на подшипниках 12 и 12' и осях 13 и 13', наклоненных к оси входного вала 6 под углом, равным половине угла при вершинах конусов. Такая установка конусов обеспечивает параллельность крайних внутренних образующих групп конусов, контактирующих с ведущими катками, и крайних наружных образующих других групп конусов, контактирующих с резиновыми кольцами охватывающих ободьев 4 и 4'. Угол при вершинах конусов может быть от 0o до 180o.
На фиг. 1 изображены спаренные конусы с одинаковыми углами при вершинах конусов, равными 90o. При таких углах обод ведущего катка и резиновое кольцо охватывающего обода располагаются в одной плоскости сечения конуса, что уравновешивает силы прижатия катка и обода и исключает действие сил прижатия на подшипники конусов.
Наклоненные оси спаренных конусов закреплены с двух сторон диска водила.
Корпус 9 крепится лапами к стенкам машины-орудия или к раме привода.
Работа трансформатора осуществляется передачей вращения от двух ведущих катков, передачей момента двигателя и циркулирующего момента. От ведущего катка 1' вращение через спаренные конусы 2' и 3' передается охватывающему ободу 4' и выходному валу, вращая их в сторону, противоположную вращению ведущего катка. Частота вращения вала определяется по формуле:
где ω′ - частота вращения выходного вала от ведущего катка 1';
ω1 - частота вращения входного вала;
d'1 - диаметр ведущего катка со стороны выходного вала;
d'3 - диаметр на конусе 3' у полюса качения;
d'2 - диаметр на конусе 2' у полюса качения;
d'4 - диаметр охватывающего обода 4'.
Вращение от катка 1 через спаренные конусы 2 и 3 благодаря закрепленному неподвижную ободу 4 передается водилу 5, частота вращения которого составит:
где ωв - частота вращения водила;
d1 - диаметр ведущего катка 1;
d3 - диаметр на конусе 3 у полюса качения;
d2 - диаметр на конусе 2 у полюса качения;
d4 - диаметр охватывающего обода 4.
Водило 5 передает вращение охватывающему ободу 4', соединенному с выходным валом 10. В этом случае частота вращения выходного вала в сторону вращения ведущих катков составит:
где ω″ - частота вращения выходного вала от ведущего катка 1.
Складывая противоположные частоты вращения выходного вала, получим: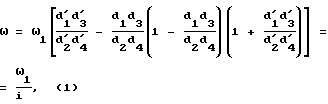
где ω - частота вращения выходного вала;
i - передаточное отношение трансформатора.
Конструкция трансформатора позволяет выбирать размеры кинематических звеньев в зависимости от кинематических и силовых требований к трансформатору. Также имеется возможность выбора величины углов при вершинах конусов с каждой стороны водила.
При одинаковых размерах кинематических звеньев того и другого вариатора можно получить значительный диапазон автоматического регулирования частоты вращения выходного вала в зависимости от передаваемого момента. При размерах звеньев расчетного образца d1 = d'1 = 120 мм, при равенстве оснований конусов d0 = 100 мм и внутренних диаметров охватывающих ободьев d4=d'4=d1+2d0Cos 45o= 260 мм получим при передаче минимального момента максимальную частоту вращения выходного вала и следующие диаметры полюсов качения на конусах: d2= 100 мм, d'2= 40 мм, d3=40 мм, d'3 = 100 мм. Подставляя эти данные в формулу /1/, получим: ωmax= ω1•0,83.
При максимальном моменте полюсы качения имеют диаметры: d'2=100 мм, d2= 40 мм, d'3=40 мм, d3 = 100 мм, при этом получим минимальную частоту вращения ωmin= ω1•0,38.
Диапазон регулирования составит: 
Важнейшие функции упругофрикционной передачи выполняют ведущие катки 1 и 1' и охватывающие ободья 4 и 4'.
Ведущие катки имеют одинаковое устройство.
Ведущий каток фиг.2 имеет металлическую ступицу 14 с тупоугольными поперечными пазами 15, в которые входят такие же выступы 16 резинового обода 17.
Резиновый обод 17, кроме передачи вращающего момента, создает силы прижатия обода к конусам, компенсирует геометрическое скольжение в пятнах контакта упругим скольжением резины обода. Кроме того, конусная рабочая поверхность резинового обода ликвидирует трение скольжения за полюсом качения, обратное вращению конусов, и увеличивает перемещение полюсов качения по образующим конусов.
Эти функции упругого обода рассмотрим подробнее.
При передаче момента на стенках пазов и выступов возникают силы: нормальная N и сила трения μcN, которые при разложении создают силу вращательного момента F и силу прижатия Q. Из равенства моментов этих сил и касательных сил μQ на конусах определяется оптимальный угол γ наклона стенки паза к радиусу, проведенному в середину этой стенки:
где d - диаметр расположения середин стенок пазов;
μ - коэффициент трения в паре резина-металл;
d1 - рабочий диаметр обода ведущего катка;
μc - коэффициент трения в паре резина-металл со смазкой.
Cочленения пазов и выступов смазываются с целью уменьшения угла γ, что уменьшает угол паза ϕ. Это сочленение с той и другой стороны катка плотно закрывается резиновыми кольцами 18 с тем, чтобы исключить попадание смазки на рабочую поверхность обода.
Силу прижатия определяет угол паза ϕ, который, как видно из треугольника ОАВ фиг.2, равен:
где n - число пазов на ступице катка.
Для равномерного распределения пазов и выступов по окружности ступицы и обода определим высоту выступа паза h из треугольника ОАВ по теореме синусов. В треугольнике угол В равен  , угол А равен
, угол А равен  . По теореме синусов получим:
. По теореме синусов получим:
Отсюда
где r - радиус окружности вершин пазов ступицы.
Вторая функция упругого обода - компенсация геометрического скольжения упругим скольжением материала обода. Для этого обод имеет переменное упругое скольжение по ширине обода, которое равно геометрическому скольжению в расчетном режиме, выражаемому формулой:
где εг - относительное геометрическое скольжение;
X - расстояние от полюса качения до расчетного сечения пятна контакта;
α - угол при вершине конуса;
d2 - диаметр конуса у полюса качения;
ε - относительное упругое скольжение материала обода в том же сечении.
Переменное упругое скольжение обода достигается следующими способами:
- за счет изменения наполнителя и получения резины различной твердости.
Наименьшая твердость резины в ободе находится в зоне наибольшего геометрического скольжения. Твердость подбирается так, чтобы она в расчетном режиме работы обеспечивала упругое скольжение, равное геометрическому по всей длине пятна контакта;
- обод собирается из тонких колец резины различной твердости, склеенных в единый обод с переменным упругим скольжением;
- обод изготавливается из резины одной твердости, а в зоне геометрического скольжения выполняются наклонные прорези с переменной глубиной по ширине обода, что обеспечивает различное упругое скольжение;
- под рабочей поверхностью резинового обода выполняются наклонные конические или другой формы каналы, которые изменяют упругое скольжение и обеспечивают охлаждение резинового обода.
Для обода необходимо выбирать материал с минимальными гистерезисными потерями энергии.
Коническая рабочая поверхность обода катка имеет значительные преимущества перед цилиндрической. Цилиндрическая поверхность по всей ширине обода прилегает к конусам. В результате при холостом ходе полюс качения находится в середине пятна контакта и с обеих сторон полюса качения возникает трение скольжения, на которое расходуется энергия. При увеличении передаваемого момента полюс качения смещается при ведомом конусе к основанию, а при ведущем к вершине конуса. При этом максимальное перемещение полюса качения составляет меньше половины ширины обода, а тяговое усилие передается только частью обода.
Конический обод имеет наибольший диаметр в зоне резины с большим упругим скольжением и при холостом ходе работает малая кромка с большим диаметром. По мере увеличения передаваемого момента увеличивается сила прижатия, и благодаря радикальной деформации обода удлиняется пятно контакта обода с конусом, а полюс качения находится за пределами пятна контакта. Следовательно, не возникает трение скольжения за полюсом качения. При расчетном моменте обод по всей ширине прижимается к конусу, а полюс качения выходит за пятно контакта.
Таким образом, конический обод исключает трение скольжения в пятнах контакта с конусами, что повышает КПД передачи, обеспечивает расчетное тяговое усилие по всей ширине обода, а также увеличивает перемещение полюса качения по образующей конуса, что увеличивает диапазон автоматического регулирования передаточного отношения трансформатора,
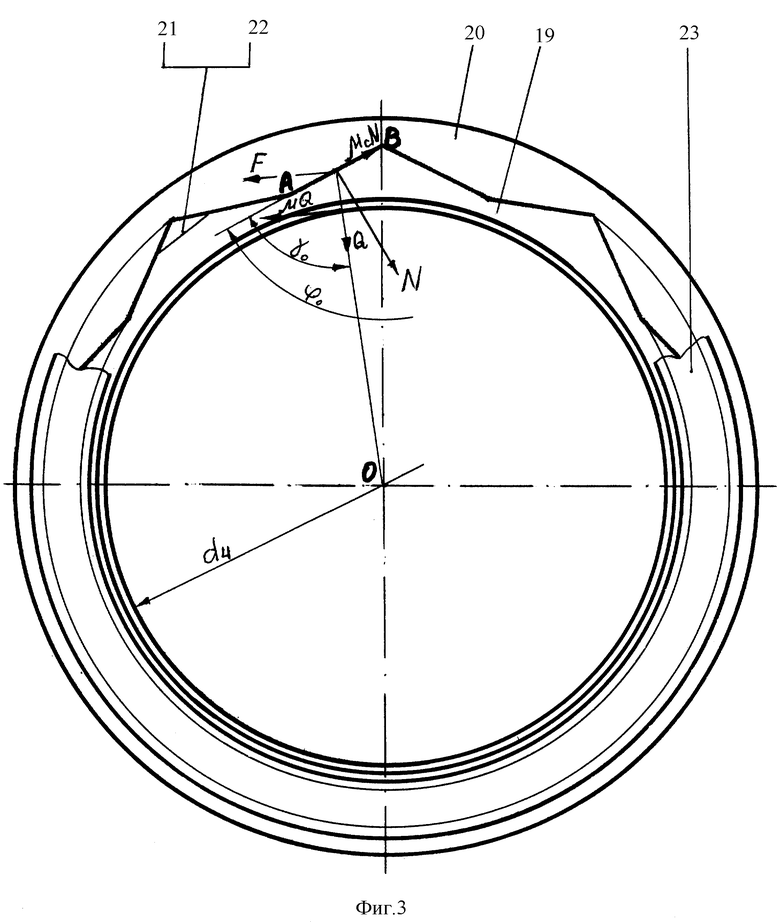
Во второй ступени передачи каждого вариатора функции, подобные функциям ведущих катков, выполняют охватывающие ободья, имеющие одинаковое устройство фиг.3.
Охватывающий обод состоит из резинового кольца 19, большого металлического кольца 20 с тупоугольными пазами 21, в которые на смазке входят такие же выступы 22 резинового кольца. Сочленения выступов и пазов плотно закрыты с обеих сторон резиновыми кольцами 23 во избежание попадания смазки на рабочую поверхность конусов и резинового кольца.
Все рассуждения о функциях обода ведущего катка применимы к расчетам по охватывающему ободу. Так, из векторов сил фиг.3 N и μcN получим величину угла паза ϕo , необходимую для создания оптимальной силы прижатия во второй ступени передачи:
где ϕo - угол паза на большом кольце;
d0 -диаметр расположения вершин выступов большого кольца;
d4 - внутренний диаметр резинового кольца;
n0 - число пазов на большом кольце.
Для размещения целого количества пазов на большом кольце по тем же рассуждениям, что и для ведущего катка, определяем высоту паза или выступа:
где r0 - радиус окружности расположения выступов пазов большого кольца.
Геометрическое скольжение во второй ступени передачи компенсируется также упругим скольжением резины, которое изменяется по ширине резинового кольца обода. Способы получения переменного упругого скольжения такие же, как и у ободьев ведущих катков. Резина с большим упругим скольжением располагается в зоне большого геометрического скольжения, а к полюсу качения уменьшается (увеличивается твердость резины). Упругое скольжение резины должно быть равно геометрическому скольжению по всей длине пятна контакта, причем гистерезисные потери в резине должны быть минимальными.
Внутренняя рабочая поверхность резинового кольца имеет коническую форму с минимальным диаметром в зоне наибольшего упругого скольжения резины, т.е. в вариаторе со стороны входного вала кольцо с наибольшим скольжением и минимальным диаметром обращено в сторону вершин конусов, а в вариаторе со стороны выходного вала кольцо охватывающего обода с наибольшим скольжением и минимальным диаметром расположено в сторону оснований конусов.
При передаче малых моментов резиновое кольцо работает узкой кромкой мягкой резины. При увеличении момента увеличивается сила прижатия и удлиняются пятна контакта кольца с конусами. При расчетном режиме пятно контакта занимает всю ширину кольца, а полюс качения выходит за пятно контакта. При конусной рабочей поверхности кольца получается тот же эффект, что и от работы конусных поверхностей ободьев ведущих катков.
Величину внутренней конусности кольца и наружной конусности обода ведущего катка следует определять экспериментально.
Преимущества предлагаемого трансформатора:
1. Соединение планетарного вариатора с дифференциальным с помощью единого водила со спаренными конусами обеспечивает передачу с большим диапазоном автоматического регулирования передаточного отношения в зависимости от момента на выходном валу.
2. Применение резиновых ободьев с переменным упругим скольжением по ширине ободьев обеспечивает полную компенсацию геометрического скольжения в пятнах контакта ободьев с конусами, что дозволяет увеличивать ширину ободьев.
3. Многопоточность передачи вращающего момента и большая ширина ободьев обеспечивает трансформацию и передачу больших мощностей с высоким КПД.
4. Конусная рабочая поверхность упругих ободьев увеличивает диапазон регулирования передаточного отношения и устраняет трение скольжения за полюсом качения.
5. Конструкция трансформатора обеспечивает работу без смазки фрикционных поверхностей с высоким коэффициентом трения резины о металл.
6. Трансформатор обеспечивает бесшумную работу и компенсацию динамических ударов при передаче моментов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА | 1999 |
|
RU2188973C2 |
| ВАРИАТОР | 1997 |
|
RU2131545C1 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА | 1995 |
|
RU2115848C1 |
| ЭЛЕКТРОПРИВОД | 1994 |
|
RU2104606C1 |
| ДВУХРОТОРНЫЙ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2096892C1 |
| Каток упругофрикционной передачи | 1991 |
|
SU1816920A1 |
| Многопоточный конусный вариатор | 1976 |
|
SU696218A1 |
| Многопоточный конусный вариатор | 1980 |
|
SU887838A2 |
| Ведущий каток фрикционного вариатора | 1986 |
|
SU1411541A1 |
| Многопоточный фрикционный редуктор | 1988 |
|
SU1714257A1 |
Изобретение относится к машиностроению. Многопоточная конусная упругофрикционная передача с автоматическим регулированием передаточного отношения трансформатора момента содержит: двухступенчатые конусный планетарный вариатор и дифференциальный конусный вариатор. Ведущие катки упомянутых вариаторов размещены на входном валу трансформатора момента. Охватывающий обод конусного планетарного вариатора прикреплен к корпусу. Охватывающий обод дифференциального конусного вариатора соединен с выходным валом трансформатора момента. Общее водило со спаренными конусами обоих вариаторов расположено между ведущими катками. Оси спаренных конусов наклонены к оси входного вала под углом, равным половине угла при вершине спаренных конусов. Образующие групп конусов, контактирующие соответственно с ведущими катками и охватывающими ободьями, параллельны оси входного вала. Сила прижатия ведущих катков и охватывающих ободьев к конусам изменяется пропорционально передаваемому моменту. Приведена формула для определения частоты вращения выходного вала. Обеспечивается большой диапазон плавного автоматического регулирования передаточного отношения в зависимости от момента на выходном валу. 3 з.п.ф-лы, 3 ил.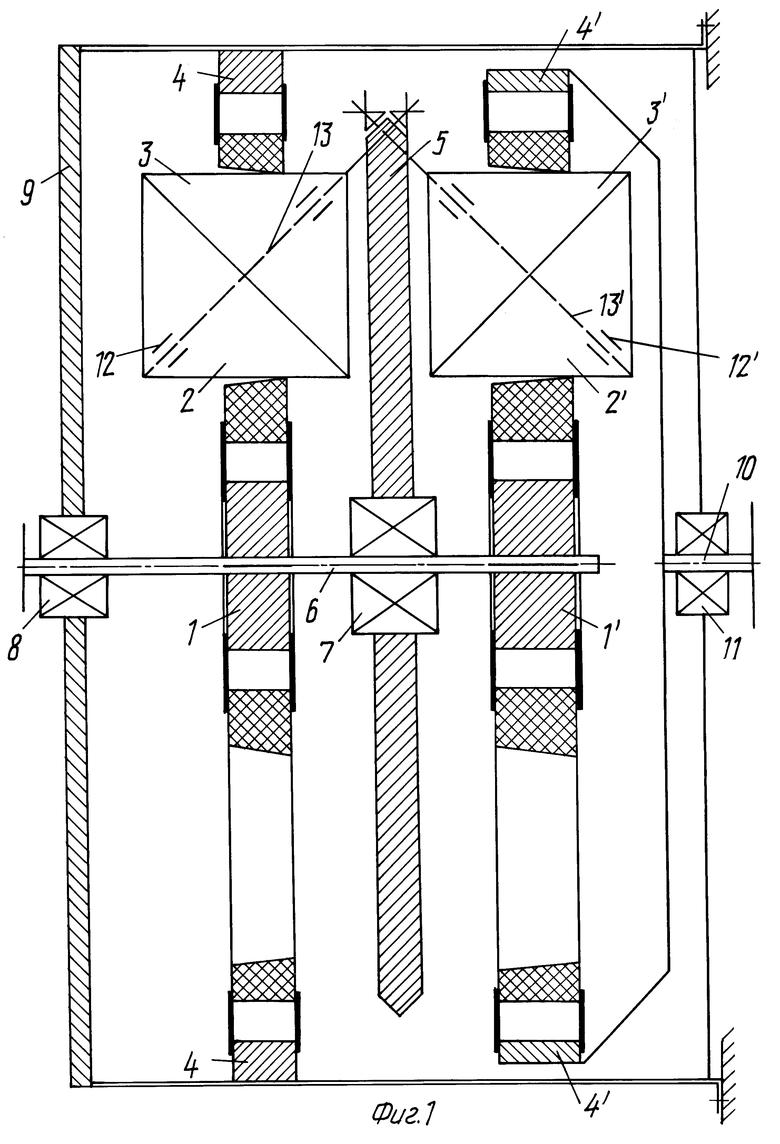

где ω - частота вращения выходного вала;
ω′ - частота вращения входного вала;
d1, d'1 - диаметры ведущих катков со стороны входного и выходного валов;
d2, d'2 - диаметры у полюсов качения на конусах со стороны входного и выходного валов в контакте с ведущими катками;
d3, d'3 - диаметры у полюсов качения на конусах со стороны входного и выходного валов в контакте с охватывающими ободьями;
d4, d'4 - внутренние диаметры охватывающих ободьев со стороны входного и выходного валов;
i - передаточное отношение трансформатора.
где ϕ - угол паза;
d - диаметр расположения середин стенок пазов;
μ - коэффициент трения резины о металл;
d1 - диаметр ведущего катка;
μс - коэффициент трения резины о металл со смазкой;
n - число пазов на ступице,
сочленения пазов и выступов плотно закрыты с обеих сторон резиновыми кольцами для исключения попадания смазки на рабочую поверхность упругого обода, геометрическое скольжение в пятках контакта обода с конусами имеет возможность компенсации упругим скольжением материала обода, например, резины, которое имеет переменную величину по ширине обода и равно в каждом сечении пятна контакта геометрическому скольжению в том же сечении и определяется формулой
где ε - оптимальное упругое скольжение материала упругого обода;
εг - относительное геометрическое скольжение;
х - расстояние от полюса качения до расчетного сечения пятна контакта;
α - угол при вершине конуса;
d2 - диаметр на конусе у полюса качения,
при этом рабочая поверхность упругого обода ведущего катка имеет коническую форму и при ведомом конусе максимальный диаметр конусности обода расположен со стороны вершины конуса, а при ведущем конусе - со стороны основания конуса.
где ϕ0 - угол паза на охватывающем ободе;
d0 - диаметр расположения середин стенок пазов на охватывающем ободе;
μ - коэффициент трения резины о металл;
d4 - внутренний диаметр резинового кольца;
μс - коэффициент трения резины о металл со смазкой;
n - число пазов на большом кольце,
геометрическое скольжение в пятнах контакта второй ступени передачи компенсируется упругим скольжением резины, для чего резина по ширине обода имеет переменное упругое скольжение, которое изменяется по закону геометрического скольжения в пятнах контакта и выражается формулой
где ε - относительное упругое скольжение резины;
εг - относительное геометрическое скольжение;
х - расстояние от полюса качения до расчетного сечения пятна контакта;
α - угол при вершине конуса;
d3 - диаметр на конусе у полюса качения,
внутренняя рабочая поверхность резинового кольца имеет коническую форму и устанавливается наименьшим диаметром к вершинам конусов в ободе со стороны входного вала и к основаниям конусов в ободе со стороны выходного вала, наименьший диаметр которого располагается в зоне наибольшего упругого скольжения.
| RU 95120658 A, 10.12.1997 | |||
| Многопоточный конусный вариатор | 1982 |
|
SU1073515A1 |
| SU 1486671 A1, 15.06.1989. | |||
