Изобретение относится к машиностроению и предназначено для уравновешивания роторов в собственных опорах.
Известен способ уравновешивания роторов, по которому уравновешивание аэродинамических сил, действующих в осевых плоскостях, производят путем использования дисбалансной неуравновешенности.
Недостатком этого способа является то, что он не может быть использован для уравновешивания аэродинамических сил, действующих в плоскостях, не совпадающих с осевой плоскостью.
Наиболее близким по технической сущности к предлагаемому является способ уравновешивания роторов в собственных опорах, по которому определяют дисбаланс, устанавливают величину и направление неуравновешенной силы аэродинамического сопротивлен.ия вращающегося ротора и осуществляют взаимокомпенсацию сил от дисбаланса и аэродинамического сопротивления.
, В данном способе расширяются технологические возможности за счет использования аэродинамических сил, действующих в осевой плоскости, заключающей центр дисбалансной массы, в результате чего компенсируются силовые воздействия данной массы.
Недостатком известного способа является установка дополнительных аэродинамических элементов, что ограничивает областьиспользования из-за дополнительного аэродинамического сопротивления.
Целью изобретения является повышение точности балансировки роторов с преобладающей аэродинамической неуравновешенностью, например, для несимметричного ротора испытательной центрифуги.
Указанная цель достигается тем, что после измерения значения дисбаланса на частоте вращения меньше заданной, определяют дисбаланс для заданной частоты и устанавливают корректирующую маесу, предназначенную для компенсации силы аэродинамического сопротивления под углом 90 к траверсе.
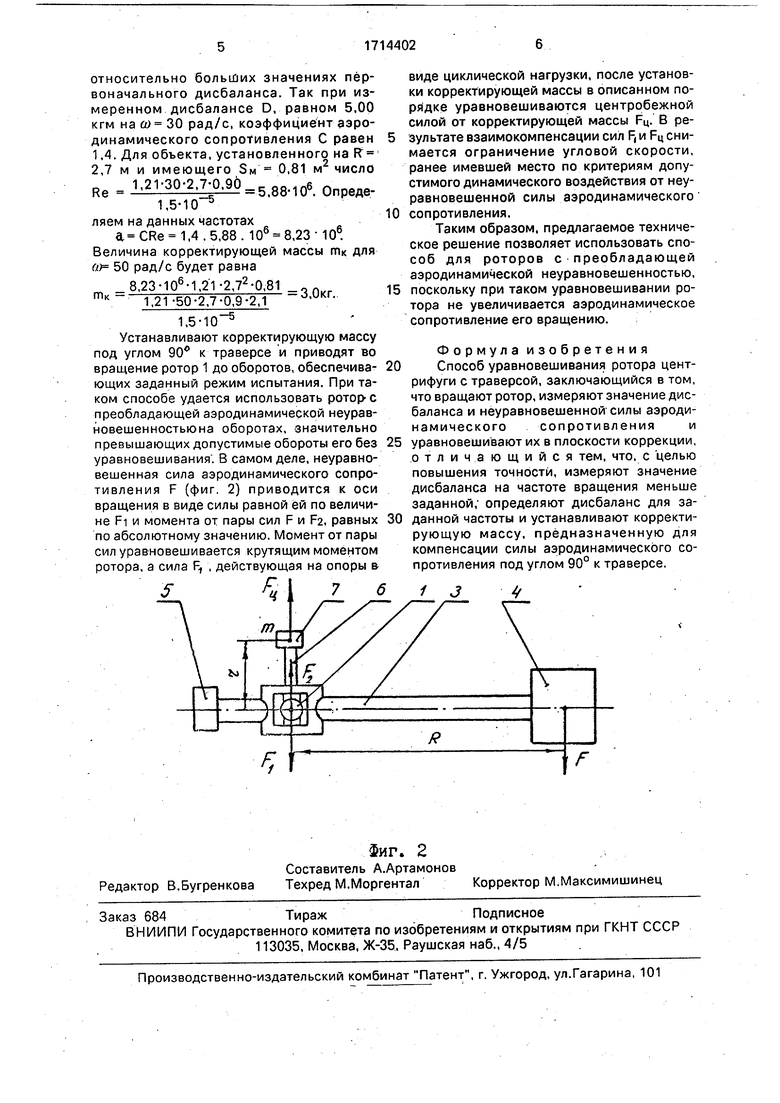
На фиг. 1 представлена схема устройства,- реализующего предлагаемый способ уравновешивания роторов в собственных опорах: на фиг. 2 - схемадействия сил и моментов в процессе испытания.
Ротор 1 центрифуги, установленный в опорах 2, несет на себе несимметричную траверсу 3. На большом плече траверсы 3 установлено испытуемое изделие 4, на меньшем - противовес 5. На штанге 6, являющейся элементом ротора, установлена корректирующая масса 7.
Способ уравновешивания роторов в собственных опорах реализуется следующим образом. РЬтор 1 приводится во вращение до оборотов меньших, чем предельно допустимые по критериям динамического воздействия на опоры 2, и определяют величину дисбаланса ротора по измерениям динамических реакций подшипников, распределение которых обусловлено только положением центра масс относительно подшипников или точек измерения.
Зная, что указанный дисбаланс обусловлен силой аэродинамического сопротивления, определяем величину коэффициента аэродинамического сопротивления данной роторной системы при оборотах меньше заданных
2D
(1)
где D - измеренный дисбаланс роторной системы;
/э-плотность воздуха;
R - расстояние от оси вращения до объекта;.
. SM - площадь Миделевого сечения объекта.
Характер изменения С достаточно изучен и в общем случае определяется зависимостью
C f(Re), .(2)
где Re -число Рейнольдса;
V ш R - линейная скорость вращающегося обьекта;
d - характерный размер обьекта;
1Л - коэффициент динамической вязкости воздуха.
Например, для больших чисел Re функциональная связь (2) устанавливается выражением
C d/Re.(3)
Количественная характеристика зависимости С f(Re) устанавливается экспериментально. В соответствии с предлагаемым способом эксперимент проводят на оборотах ниже заданных. Например, при больших числах Re, используя данные эксперимента, определяют коэффициент С из (3). Рассчитывая коэффициент аэродинамического сопротивления для заданной частоты, определяют величину корректирующей массы для компенсации силы аэродинамического сопротивления, устанавливаемой на радиусе г по формуле
(4)
mk
Re 2 г
Нетрудно убедиться, что реализация предлагаемого способа не требует чрезмерно больших корректирующих масс даже при относительно больших значениях первоначального дисбаланса. Так при измеренном дисбалансе D, равном 5.00 кгм на ш 30 рад/с, коэффициент аэродинамического сопротивления С равен 1,4. Для объекта, установленного на Ff 2,7 м и имеющего SM 0,81 м число Re 1 21-30.2,7.0.96,3Q.Qe .,. 1,5-10 ляем на данных частотах 1,4. 5,88. 10 8,23-10. Величина корректирующей массы Шк для ft 50 рад/с будет равна „ 8,23-10 -1,21 2,,81 ... 1,21-50-2,7-0,9-2,1 Устанавливают корректирующую массу под углом 90 к траверсе и приводят во вращение ротор 1 до оборотов, обеспечивающих заданный режим испытания. При таком способе удается использовать ротор-с преобладающей аэродинамической неуравновешенностью на оборотах, значительно превышающих допустимые обороты его без уравновешивания . В самом деле, неуравновешенная сила аэродинамического сопротивления F (фиг. 2) приводится к оси вращения в виде силы равной ей по величине FI и момента от пары сил F и Р2, равных по абсолютному значению. Момент от пары сил уравновешивается крутящим моментом ротора, а сила Р , действующая на опоры в виде циклической нагрузки, после установки корректирующей массы в описанном порядке уравновешиваются центробежной силой от корректирующей массы Рц. В результате взаимокомпенсации сил Pj и Рц снимается ограничение угловой скорости, ранее имевшей место по критериям допустимого динамического воздействия от неуравновешенной силы аэродинамического сопротивления. Таким образом, предлагаемое техническое решение позволяет использовать способ для роторов с преобладающей аэродинамической неуравновешенностью, поскольку при таком уравновешивании ротора не увеличивается аэродинамическое сопротивление его вращению. Формула изобретения Способ уравновешивания ротора центрифуги с траверсой, заключающийся в том, что вращают ротор, измеряют значение дисбаланса и неуравновешенной силы аэродинамического сопротивления и уравновешивают их в плоскости коррекции, отличающийся тем. что, с целью повышения точности, измеряют значение дисбаланса на частоте вращения меньше заданной; определяют дисбаланс для заданной частоты и устанавливают корректирующую массу, предназначенную для компенсации силы аэродинамического сопротивления под углом 90° к траверсе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сборки и балансировки высокооборотных роторов и валопроводов авиационных газотурбинных двигателей и газоперекачивающих агрегатов | 2022 |
|
RU2822671C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| СПОСОБ НИЗКООБОРОТНОЙ БАЛАНСИРОВКИ МАССЫ И АЭРОДИНАМИКИ ВЫСОКООБОРОТНОГО ЛОПАТОЧНОГО РОТОРА | 2009 |
|
RU2419773C2 |
| СПОСОБ БАЛАНСИРОВКИ НЕСИММЕТРИЧНЫХ РОТОРОВ | 2006 |
|
RU2310177C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| СПОСОБ БАЛАНСИРОВКИ ГИБКИХ РОТОРОВ | 2009 |
|
RU2399428C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА ЦБН, ОСНАЩЕННОГО СИСТЕМОЙ МАГНИТНОГО ПОДВЕСА, В СОБСТВЕННЫХ ОПОРАХ | 2021 |
|
RU2803403C2 |
| СПОСОБ БАЛАНСИРОВКИ ЭЛЕМЕНТОВ РОТОРНЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2485467C2 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| Способ обеспечения автоматической балансировки статически неуравновешенного ротора | 2021 |
|
RU2766945C1 |
Изобретение может быть использовано для балансировки крупногабаритных несимметричных роторов, в частности центрифуг. Изобретение позволяет повысить точность балансировки путем раздельной компенсации составляющих неуравновешенности. Ротор 1 с траверсой 3 разгоняют до частоты вращения меньше допустимой и измеряют параметры дисбаланса по реакции опоры 2. Определяют значение дисбаланса для заданной частоты вращения, устанавливают корректирующую массу 7, предназначенную для компенсаций аэродинамической составляющей неуравновешенности, под углом 90° к траверсе 3. 2 ил.00сJis^ ^ Ою
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 0 |
|
SU191184A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
