Изобретение относится к машиностроению, в частности к эле.ктроприводам, и является усовершенствованием .устройства по авт.св. № 1293697.
Известное устройство для коррекции циклических ошибок содержит цифроаналоговый преобразователь, последовательно соединенные датчик нулевого положения и элемент задержки, функциональный генератор гармоники, последовательно соединенные преобра.зователь частота - код и функциональный преобразователь модуля и второй |бяок памяти, подключенный входом к выходу преобразователя частота - код,
а выходом - к кодовому входу счетчика импульсов, у которого управляющие входы прямого и обратного счета соединены соответственно с первым и вторым входами устройства, сбросовый вход счетчика импульсов соединен с выходом датчика нулевого положения а вход записи кода счетчика импульсов соединен с выходом элемента задержки и с первым входом преобразователя частота - код, второй и третий входы которого подключены соответственно к управляющим входам прямого и обратного счета счетчика импульсов.
Недостатком известного устройства является то, что для его работы необходимо применение импульсного датчика с числом импульсов за цикл, равным числу счета счетчика, что ограничивает область его применения.
Цель изобретения - расширение области применения устройства за счет использования импульсного датчика с произвольным числом импульсов за цикл (один оборот вала).
Поставленная цель достигается тем, что, в устройство для коррекции циклических ошибок введен блок согласования, содержащий два счетчика импульсов, формирователь импульсов, блок памяти импульсов положения, установочные входы предварительной записи счетчиков импульсов соединены с выходом формирователя импульсов, первый вход которого соединен с выходом первого счетчика импульсов, второй вход с выходом второго счетчика импульсов, третий вход - со сбросовыми входами счетчиков импульсов и с выходом датчика нулевого положения, входы тредварительной записи счетчиков импульсов соединены с выходом блока памяти импульсов положения, вход которого соединен с выходом .счетчика импульсов, счетные входы первого и второго счетчиков импульсов являются входами блока согласования, соединены с первым и вторым входами устройства, а выходы первого и второго счетчиков импульсов являются выходами блока согласования, которые соединены с соответствующими управляющими входами счетчика импульсов
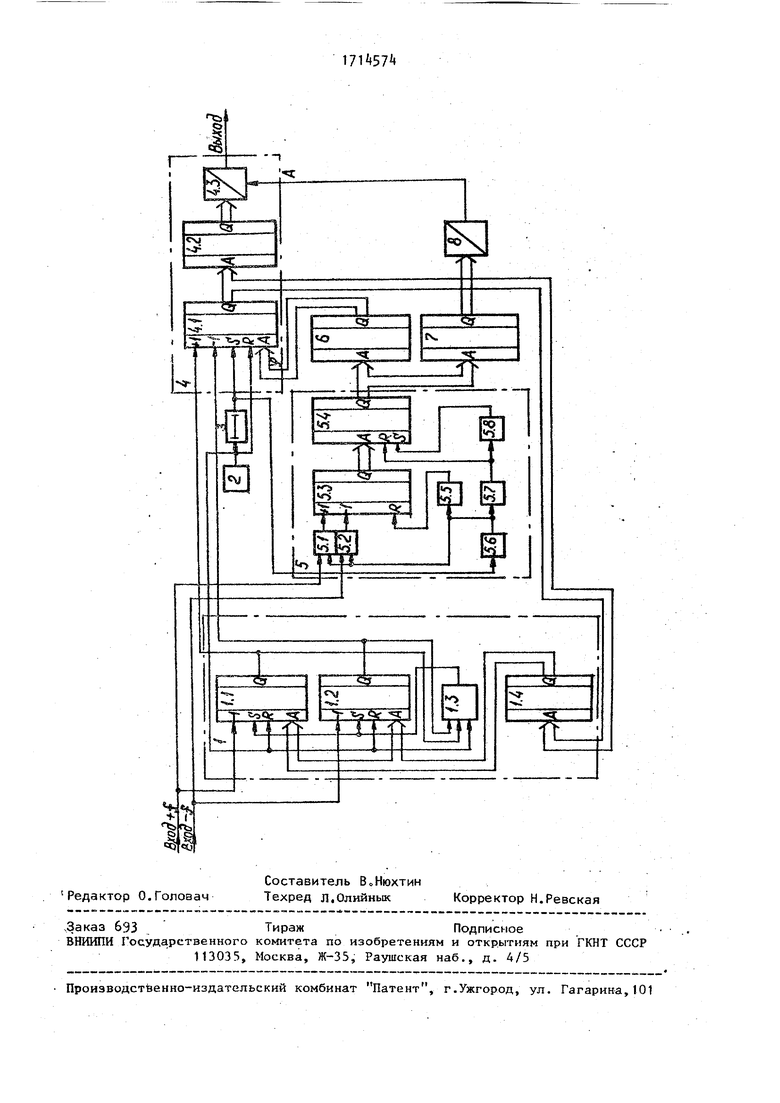
На чертеже представлена функциональная схема устройства.
Устройство для коррекции цикличес ких ошибок содержит блок ,1 согласования, состоящий из двух сметчиков 1.1 и 1,2 импульсов, формирователя КЗ импульсов и блока 1. памяти импульсов положения, датчик 2 нулевого ло ложения, элемент 3 задержки, функцио нальный генератор 4 гармоники, состоящий из датчика 4,1 импульсов, первого блока 4.2 памяти и умножаю-. щего цифровналогового преобразователя 4.3, преобразователь частота - ко 5, состоящий из первого 5о1 и второг 5.2 элементов, второго счетчика 5.3 импульсов, регистра , генератора 5.6 временного интервала, первого 5.5, второго 5.7 и третьего 5.8 фор-мирователей импульсов, второй блок 6 памяти, функциональный преобразователь 7 модуля и цифроаналоговый преобразователь 8 модуля
Устройство работает следующим образом. I
Импульсы if с входа поступают на преобразователь частота - код 5. На выходе счетчика 5.3 за длительность сигнала с генератора 5.6 фиксируется код скорости и переписывается в регистр по сигналам с формирователей 5.7 и5.8о Формирователь 5 о5 формирует импульс сброса счетчика 5.3. По сигналу с датчика 2
,5 нулевого положения датчик 4с,1 импульсов обнуляется, и в него по сигналу с элемента 3 задержки записывается с блока 6 памяти код требуемого фазового сдвига относительно нулевого
Q положения в зависимости от скорости перемещения (частоты следования импульсов if).. Это позволяет скомпенсировать фазовые искажения привода На выходе цифроаналогового преобразователя 8 формируется напряжение, обратно пропорциональное модулю частотной характеристики. Пропорционально этому сигналу изменяется напряжение на выходе устройства. Это
д позволяет компенсировать амплитудные искажения привода, отрабатывающего корректирующий сигнал.
По окончанию перемещения модуль частотной характеристики устанавливается равным единице. При этом сигнал на выходе устройства становится равным амплитуде корректируемой гармоники кинематической погрешности. Привод отрабатывает интегральную (накопленную) разность менщу корректирующим и измененным корректирующим сигналами, что повыиает точность позиционирования .
Блок 1 согласования работает следующим образом. В блок 1.4 памяти импульсов положения предварительно записывается информация о том, какое количество импульсов N датчика положения необходимо пропустить на i-м шаге работы устройства коррекции,
0 причём по i-му адресу блока 1„4 памяти записывается число N -1. По сигйалу с датчика 2 нулевого положения счетчики 1.1, 1.2 и 4.1 обнуляются. На входе блока 1.4 памяти
импульсов положения устанавливаетс я код первого адреса, а на выходе - код числа Сигнал с датчика нулевого положения поступает также на
вход формирователя 1.3, который формирует с некоторой задержкой импульс, поступающий на вход разрешения предварительной записи счетчиков 1,1 и 1.2. При этом в счетчиках записывается с выхода блока 1,4 памяти код числа N -1. По приходу с датчика положения N4 импульсов +f на входы счетчиков 1,1 и 1„2 на выходе одного Q из них появляется импульс, который поступает на счетчик и формирователь 1.3 о Формирователь 1.3 формирует импульс сброса счетчиков 1,1 и 1,2. Счетчик 4,1 изменяет свое сое- / j тояние на 1, тем самым изменяя адрес на входе блоков 1.4 и 4.2 памяти f За длительность периода следования импульсов с датчика нулевого положения цикл повторяется i раз. Импульсы 2о с блока 1 согласования поступают на вход счетчика 4.1 импульсов, цикл . работы которого соответствует периоду следования импульсов с датчика 2 нулевого положения. На выходе циф- 25 роаналогового преобразователя 4.3 по кодам блока 4о2 памяти формируется гармонический сигнал, период которого равен периоду гармоники кинематической погрешности,30
Предлагаемое устройство для коррекции циклических ошибок позволяет использовать импульсный датчик с произвольным числом импульсов за один цикл (оборот вала), что расширяет
функциональные возможности применения устройства
Формула изобретения I Устройство для коррекции циклических ошибок по авт,св, № 1293697,о тли чающееся тем, что, с целью расширения области применения, в него введен блок согласования, содержащий два счетчика импульсов, формирователь импульсов, блок памяти импульсов положения, установочные входы предварительной записи первого и второго счетчиков импульсов соединены с выходом формирователя импульсов, первый вход которого соединен с выходом первого счетчика импульсов, второй вход - с выходом; второго счетчика импульсов,третий вход - со сбросовыми входами счетчиков импульсов и с выходом датчика нулевого положения, входы предварительной записи счетчиков импульсов соединены с выходом блока памяти импульсов положения, вход которого соединен с выходом счетчика импульсов, счетные входы первого и второго счетчиков импульсов являются входами блока согласования, соединены с первым и вторым входами устройства, а выходы первого и второго счетчиков импульсов являются выходами блока согласования, которые соединены с соответствующими управляющими входами счетчика импульсов,.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции циклических ошибок | 1985 |
|
SU1293697A1 |
| Устройство для коррекции циклических ошибок | 1986 |
|
SU1359770A1 |
| Устройство для формирования корректирующих сигналов кинематических погрешностей | 1984 |
|
SU1224792A1 |
| ЦИФРОВОЕ РЕЛЕ ЧАСТОТЫ ВРАЩЕНИЯ С ФУНКЦИЕЙ РЕКОНСТРУКТИВНОЙ ДИАГНОСТИКИ | 2016 |
|
RU2618495C1 |
| УСТРОЙСТВО ДЛЯ ЗАПИСИ-ВОСПРОИЗВЕДЕНИЯ МНОГОКАНАЛЬНОЙ ЦИФРОВОЙ ИНФОРМАЦИИ | 1995 |
|
RU2107953C1 |
| ЦИФРОВОЕ ПЯТИКАНАЛЬНОЕ РЕЛЕ С ФУНКЦИЕЙ САМОДИАГНОСТИКИ | 2017 |
|
RU2671545C1 |
| ЦИФРОВОЕ ЧЕТЫРЕХКАНАЛЬНОЕ РЕЛЕ С ФУНКЦИЕЙ РЕКОНСТРУКТИВНОЙ ДИАГНОСТИКИ | 2017 |
|
RU2659990C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ФОРМЫ КРИВОЙ НАПРЯЖЕНИЯ | 2014 |
|
RU2580944C1 |
| Устройство для магнитной записи цифровой информации | 1982 |
|
SU1037337A1 |
| Устройство для испытаний датчиков давления | 1983 |
|
SU1129624A1 |
Изобретение относится к машиностроению, в частности к электроприводам. Целью изобретения является расширение области применения устройства. Для этого в него введен блок согласования, содержащий два счетчика импульсов, формирователь импульсов, блок памяти импульсов положения, установочные входы предварительной за-писи счетчиков импульсов соединены с выходом формирователя импульсов, первый вход которого соединен с выходом первого счетчика импульсов, второй вход - с выходом второго счетчи- , ка импульсов, третий вход - со сбросовыми входами счетчиков импульсов и с выходом датчика нулевого положения, входы предварительной записи счетчиков импульсов соединены с выходом блока памяти импульсов положения, вход которого соединен с выходом счетчика импульсов, счетные входы первого и второго счетчиков импульсов являются входами блока согласования, соединены с первым и вторым входами устройства, а выходы первого и второго счетчиков импульсов являются выходами блока согласования, кото- 1рые соединены с соответствующими управляющими входами счетчика импульсов 1 ил.
| Устройство для коррекции циклических ошибок | 1985 |
|
SU1293697A1 |
