Изобретение относится . программному управлению станками и предназначено для формирования корректирующих сигналов для компенсации систематических ошибок положения конечных звеньев станка, вызванных, например, кинематическими погрешностями передач, несоосностью соединений и систематической погрешностью датчиков положения.
Цель изобретения - повышение точности коррекции.
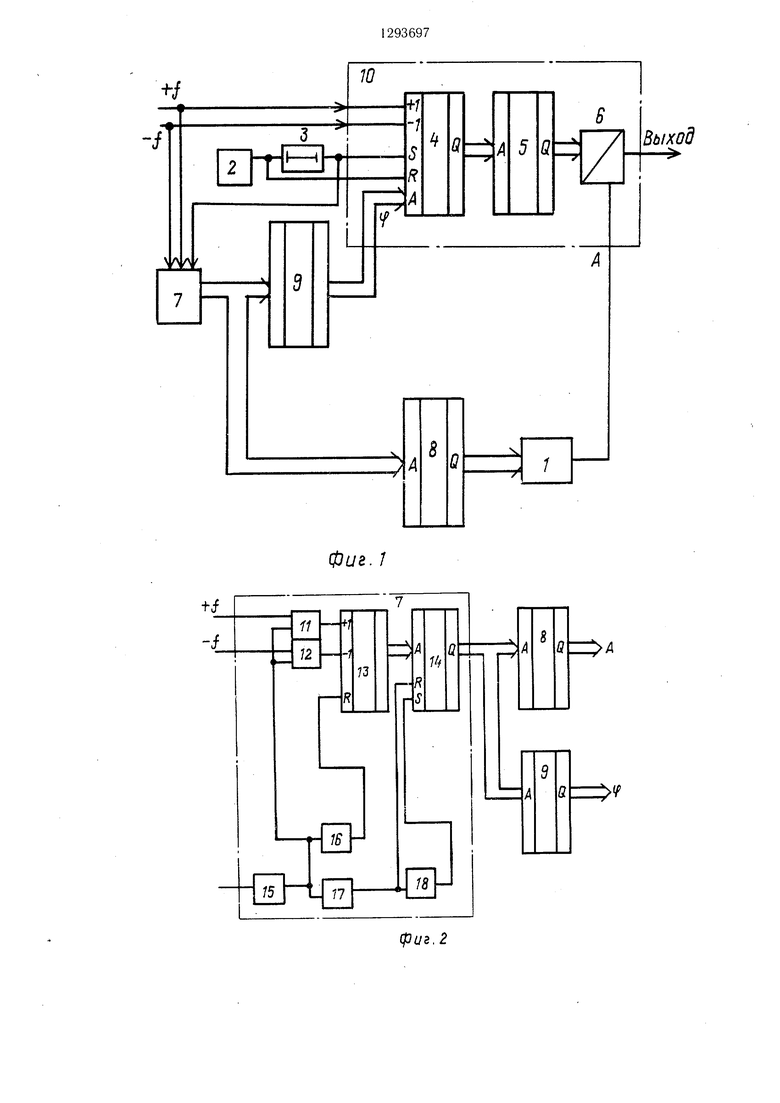
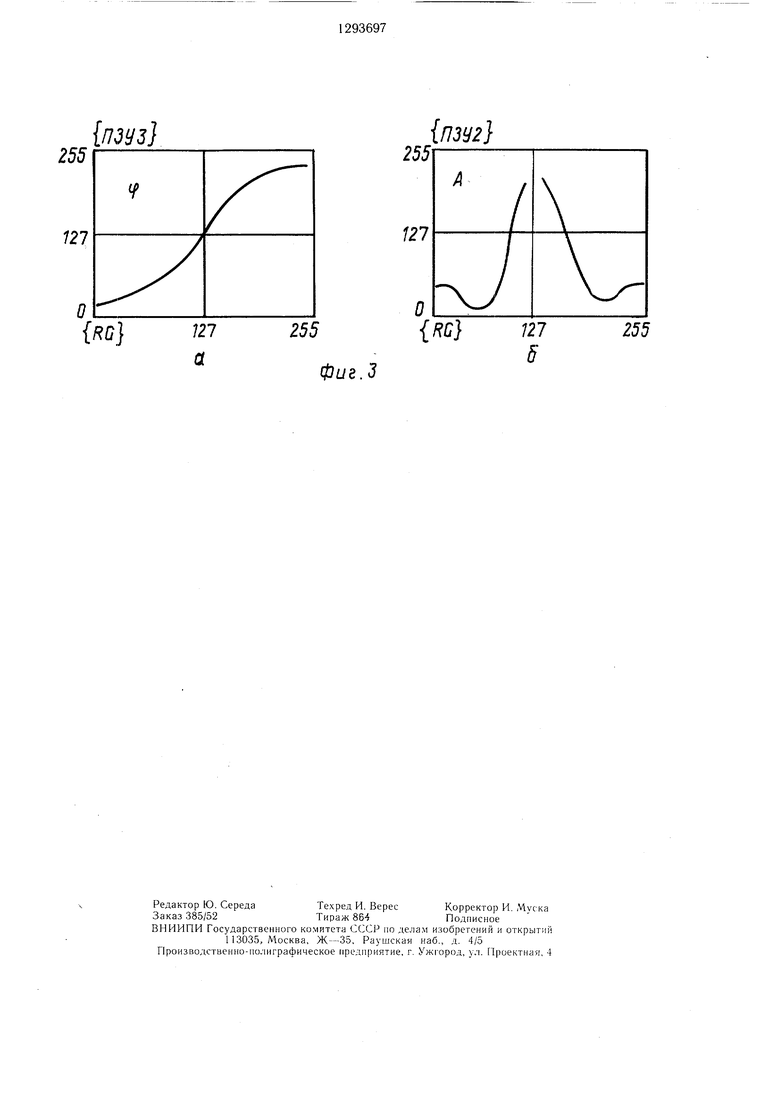
На фиг. 1 представлена структурно-функциональная схема предлагаемого устройства; на фиг. 2 - структурно-функциональная схема преобразователя частота-код; на фиг. 3 - диаграммы записи в блоке памяти и функциональном преобразователе модуля.
Устройство содержит цифроаналоговый преобразователь 1 модуля, датчик 2 нулевого положения, элемент 3 задержки, счетчик 4 импульсов, первый блок 5 памяти, умножающий цифроаналоговый преобразователь 6, преобразователь 7 частота-код, функциональный преобразователь 8 модуля и второй блок 9 памяти.
Счетчик 4 импульсов, первый блок 5 памяти и умножающий цифроаналоговый преобразователь 6 образуют функциональный генератор 10 гармоники. Преобразователь 7 частота-код содержит первый и второй элементы И 11 и 12, второй счетчик 13 импульсов, регистр 14, генератор 15 временного интервала и первый, второй и третий формирователи импульсов 16, 17 и 18.
Преобразователь частота-код работает следующим образом. При поступлении на него импульсов ±f на выходе счетчика за длительность сигнала с генератора 15 фиксируется код скорости и переписывается в регистр 14 по сигналам с формирователей 17 и 18. При прямом счете коды скоростей находятся в пределах О-127 (фиг. 2 и 3), а при обратном - в пределах 127- 255. В зависимости от этого на выходе блока 9 памяти код фазового сдвига формируется в прямом или дополнительном коде, это обеспечивает изменение знака смещения фазы сигнала функционального генератора гармоники при изменении направления перемещения. Не трудно заметить, что амплитудная характеристика для содержимого регистра 0-127 и 127-256 формируется одинаковой (без изменения знака).
Устройство работает следующим образом.
По сигналу с датчика 2 счетчик 4 импульсов обнуляется и в него записывается код с блока 9 памяти требуемого фазового сдвига относительно нулевого положения в зависимости от скорости перемещения (частоты). Это позволяет скомпенсировать фазовые искажения привода.
Импульсы положения поступают на вход счетчика 4 импульсов, цикл работы которо- го, на выходе цифроаналогового преобразователя 6 по кодам блока 5 памяти формируется период гармоники кинематической погрешности. На выходе преобразователя 7 частота-код формируется код текущей скорости (частоты корректируемой гар- моники).
При этом на выходе цифроаналогового преобразователя 1 формируется напряжение, обратно-пропорциональное модулю частотной характеристики. Пропорционально этому сигналу изменяется напряжение на выходе устройства. Это позволяет компенсировать амплитудные искажения привода отрабатывающего корректирующий сигнал.
По окончанию перемещения модуль частотной характеристики устанавливается рав- ным единице.
При этом сигнал на выходе устройства установится равным амплитуде корректируемой гармоники кинематической погрешности.
При этом привод обрабатывает интегральную (накопленную) разность между корректирующим и измененным корректирующим сигналами. Это повышает точность позиционирования.
30
Формула изобретения
5
Устройство для коррекции циклических ошибок, содержащее цифро-аналоговый преобразователь модуля,последовательно соединенные датчик нулевого положения и элемент
задержки, последовательно соединенные счетчик импульсов, первый блок памяти и умножающий цифроаналоговый преобразователь, второй вход которого соединен с выходом цифроаналогового преобразователя модуля, отличающееся тем, что, с целью по0 выщения точности коррекции, в него введены последовательно соединенные преобразователь частота-код и функциональный преобразователь модуля, и второй блок памяти, подключенный входом к выходу преобразователя частота-код, а выходом - к кодовому входу счетчика импульсов, у которого управляющие входы прямого и обратного счета соединены соответственно с первым и вторым входами устройства, сбросовый вход счетчика импульсов соединен с выхоQ дом датчика нулевого положения, а вход записи кода счетчика импульсов соединен с выходом элемента задержки и с первым входом преобразователя частота-код, второй и третий входы которого подключены соответственно к управляющим входам прямого и обратного счета счетчика ИМПУЛЬСОВ.
-/
гВ
(J
Q
Выход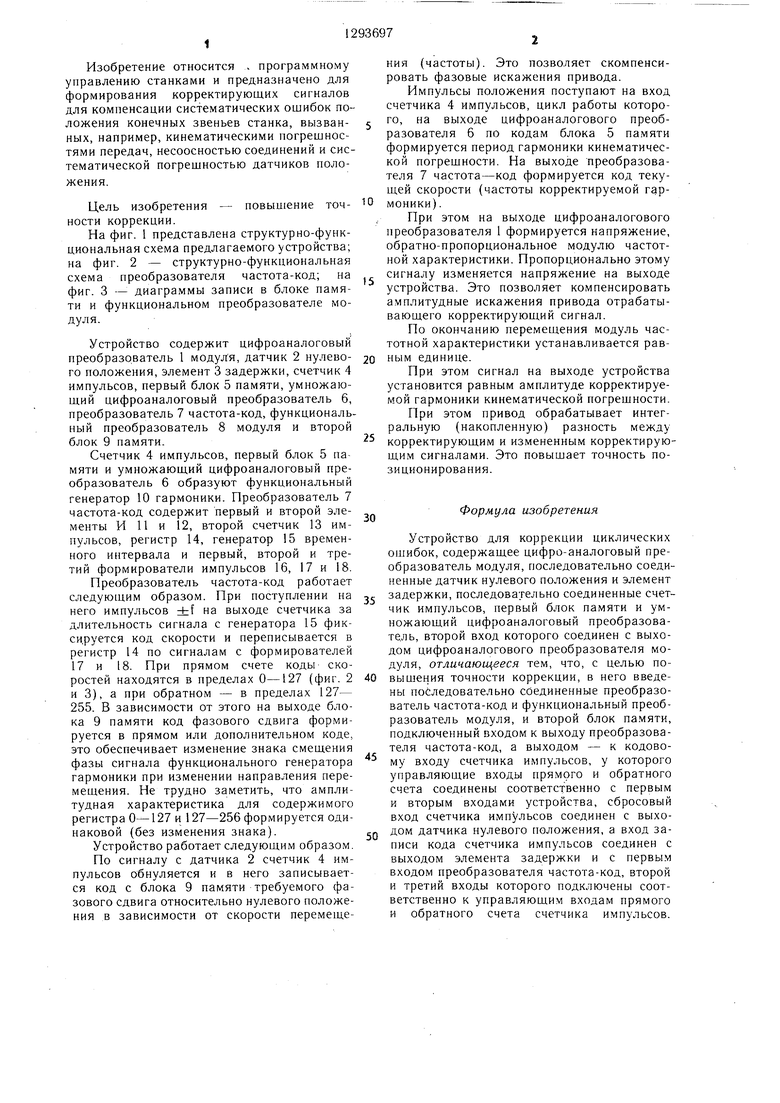
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции циклических ошибок | 1989 |
|
SU1714574A2 |
| Способ параметрической компенсации циклических погрешностей привода подач станка с ЧПУ | 1986 |
|
SU1403017A1 |
| Устройство для коррекции циклических ошибок | 1986 |
|
SU1359770A1 |
| Устройство для балансировки | 1991 |
|
SU1793291A1 |
| УСТРОЙСТВО МОНИТОРИНГА ВЫСОКОВОЛЬТНЫХ ВВОДОВ И СИГНАЛИЗАЦИИ О СОСТОЯНИИ ИХ ИЗОЛЯЦИИ | 2006 |
|
RU2328009C1 |
| Устройство для измерения модуля и фазы комплексного коэффициента отражения двухполюсника | 1986 |
|
SU1350622A1 |
| Функциональный преобразователь | 1983 |
|
SU1115069A1 |
| Устройство коррекции систематических ошибок | 1985 |
|
SU1339496A1 |
| Устройство для магнитной записи цифровой информации | 1982 |
|
SU1037337A1 |
| Следящий аналого-цифровой преобразователь | 1988 |
|
SU1562972A1 |
Изобретение предназначено для формирования корректирующих сигналов для компенсации систематических ошибок приводов. Целью изобретения является .повышение точности коррекции. Цоставленная цель достигается тем, что устройство, содержаш,ее цифроаналоговый преобразователь модуля и функциональный генератор гармоники,включаюш,ий последовательно соединенные счетчик импульсов, первый блок памяти и умножающий цифроаналоговый преобразователь, дополнительно снабжено последовательно соединенными преобразователем частота- код, функциональным преобразователем модуля, и цифроаналоговым преобразователем модуля, выходом соединенным с входом опорного напряжения умножающего цифроана- логового преобразователя, при этом вход преобразователя частота-код объединен с входом функционального генератора гар.мо- ники, а выход подключен к кодовому входу счетчика импульсов функционального генератора гармоники через второй блок памяти. Такое построение устройства позволяет отрабатывать приводу интегральную разность между корректирующим и измененным корректирующим сигналами. 1 ил. л (Л ю со со О5 СО 
Фиг. /
А
фиг.2
255
пзиз
127
121
а
255
фиг.З
ПЗУ2}
| УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ ПОГРЕШНОСТЕЙКИНЕМАТИЧЕСКОЙ ПЕРЕДАЧИ В СТАНКАХ С ЧИСЛОВЫМПРОГРАММНЫМ УПРАВЛЕНИЕМ | 1972 |
|
SU434382A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для регулирования синхронногоХОдА зубООбРАбАТыВАющЕгО CTAHKA | 1978 |
|
SU822772A3 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
