Изобретение относится к программному управлению станками и предназначено для формирования корректирующих сигналов для компенсации систематических ошибок положения конечных звеньев станка, вызванных, например, кинематическими погрешностям передач, несоосностью соединений и систематической погрешностью датчиков положения,
Целью изобретения является упрощение устройства при сохранении его точности.
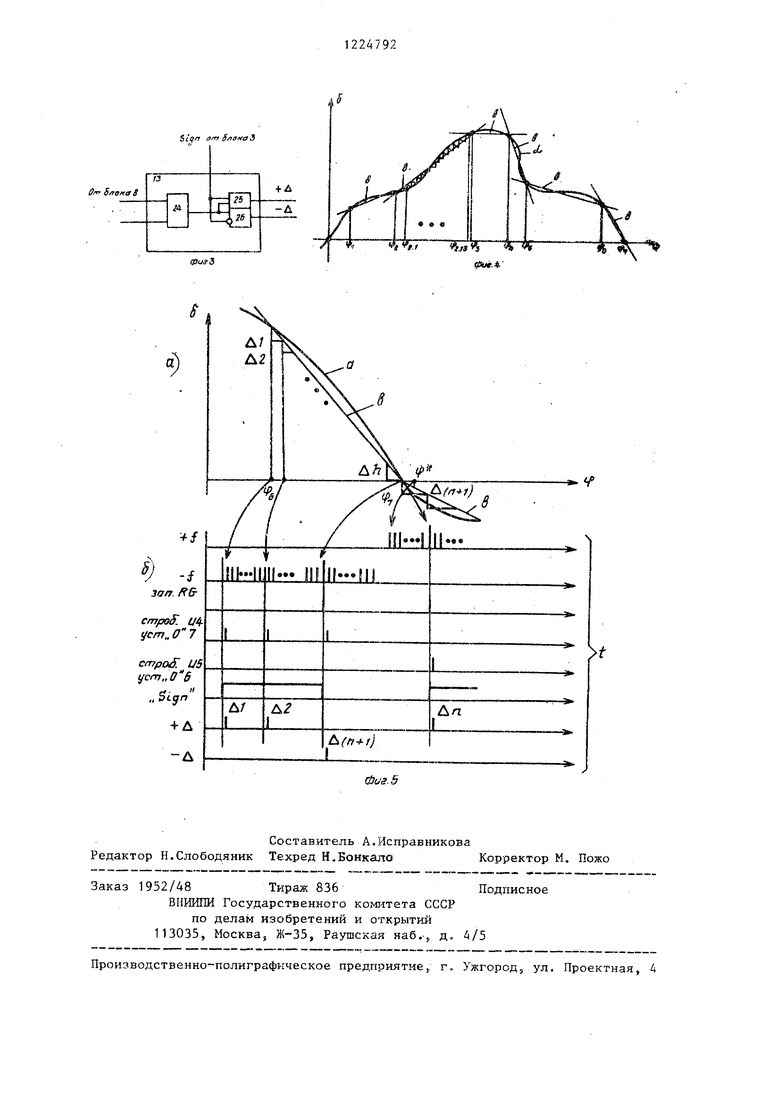
На фиг. 1 представлена структурная схема устройстваJ на фиг. 2 - функци- ональные схемы дешифратора и блока памяти; на фиг, 3 - схема комьгутатора знака; на фиг. 4 - пример формирования приближенного сигнала систематической погрешностиJ на фиг,. 5а - бо- лее подробный пример формирования приближенного сигнала систематической погрешности; на фиг. 56 - временная диаграмма работь устройства.
Устройство содержит счетчик поло- жения 1 (фиг. 1), дешифратор 2, блок памяти 3, первый 4 и второй 5 элементы И, первый 6 и второй 7 счетчики-делители, формирователь 8 импуль- coBj СОСТОЯ1ДИЙ из первого 9 и второ- го 10 элементов задержки, первого 11 и второго 12 коммутаторов импульсов, устройство также содержит комг-тутатор 13 знака, В дешифратор 2 входят элементы И-ИЛИ 14,, 142-..14, элемек- ты 2И-1-ШИ 15,, 152...15)(, формирователи импу1(ьсов 16 и 17. Блок 3 содерлсит формирователь импульсов 18, группу элементов ИЛИ 19, элементы И.ГШ 20, 21, регистр 22, триггер 23 Коммутатор 13 знака состоит из элемента ИЖ 24, элементов И 25 к 26.
На фиг. 1 обозначены - f j , +{, - шины входных импульсовJ на фиг, 2 - sign - знаковый выход блока 5 памяти
на фиг. 4 и 5 - ОС - сигнал систематической погрешности, 5 - систематическая погрешность, tf - положение привода, Ь участки с постоянной скоростью изменения погрешности Д,, 2 ,...йп, - сигналы перемещениЯэ соответствующие одноку импульсу коррекции, точка реверса.
Счетчики t, 6 и 7 выполня а1 ся ре версиБНЫми. Время задержки элементов 9 и 10 выбирается не меньше вре™ менн переходных процессов в эламен- тах 1-3 и не больше периода максимальной частоты следования к 4пульсов
S
,4 0
S ji ..
-S
на входах 4 или -1 . А при на- кождении счетчика 6 (или счетчика 7; в нулевом состоянии на его выходе Равенство нулю появляется сигнал (R - сбросовые входы счетчиков).
Коммутатор знака 13 работает следующим образом. При высоком уровне сигн;1ла на управляющем входе коммутатора знака сигналы с информационных входов поступают на выход -- А , а при низком уровне .сигнала - на - U .
Подготовку устройства к работе осуществляют следующим образом.Предварительно иумеряют и записывают сигнал систематической погрешности, например от кинематической погрешности передачи станка или погрешности измерения положения. По полученной записи формируют приближенньй сигнгш, соответствующий сигналу об систематической погрешности S (фиг. 4) относительно заданного или текущего положения ср привода. Сигналы о; составляют участки b с постоянной скоростью изменения погрешности. Запоминают положения cf,-cf привода ,- которые соответствуют границам участков t . Для сравнения на фиг. 4 показаны также положения ср., - Р вода, соответствующие границам участков, составляющих приближенный сигнал, формируемый устройством-прототипом. Запоминание положений cf,- Lf7 осуществляют для каждого конкретного станка в дешифраторе 2, например, путем соответствующей распайки прямых и инверсных входов элементов 14j- 14 к выходам счетчика 1. Для каждого положения Cf (участка) запоминают в блоке 3 сигнал скорости и знака коррекции. Это осуществляется, например, распайкой входов элементов 19 и 20 на соответствующие шины (1..,k). Формирователи 16 и 17 служат для повышения надежности работы схемы и обеспечивают выдачу информации с дешифратора 2 по окончании переходных процессов в счетчике 1. С помощью элемента 21 и формирователя 18 обеспечивается сброс регистра 22 перед записью в него новой информации.
Устройство работает следующим образом.
Сигнал текущего положения в зависимости от направления перемещения поступает на шины f ,.; или-in. При
этом сигналы поступают на вход счетчика 1, изменяя его состояние и соответственно кодированньш сигнал на выходе. Каждому кодированному сигналу с выхода счетчика 1 соответствует определенное положение органа станка. При равенстве текущего и запомненного в дешифраторе 2 положений с одного из выходов дешифратора 2 поступает сигнал на одну из шин (1...k) блока 3 памяти. При этом происходит сброс регистра 22 и триггера 23 по входу R через элементы 21 и 18, а затем запись кодированного сигнала скорости в регистре 22 и знака в триг гер 23. Сброс осуществляется укороченным импульсом, формируемым формирователем 18 по переднему фронту импульса формирователя 17. Запись осуществляется импульсом с формирователя 17 после окончания импульса формирователя 18. На диаграмме фиг. 5 показан только импульс записи. В этой точке счетчик 6 находится в нулевом положении. Первый импульс -i (он вы- делен на диаграмме), задержанный элементом задержки 9, через первьш элемент И коммутатора 11 осуществляет стробирование записи кода с регистра 22 в счетчик 6 (фиг. 56, сиг- нал строб. И4 уст. О 7) и сброс счетчика 7 по шине Уст.О
Далее этот импульс через комкута- тор знака проходит на выход - и устройства (д.1). Перемещение, соответст вующее этому импульсу, условно обозначено на фиг. 5а. Следующие импульс на шине -i через коммутатор 11 (втр- рой элемент И) будут вычитаться из содержимого счетчика 6 и суммировать ся в счетчике 7. При достижении нуля в счетчике 6 следующий и1-шульс через верхний элемент И коммутатора опять поступит на вход схемы элемента И 5 и обеспечит запись кода ско- рости из блока 3 и одновременно обеспечит сброс кода в счетчике 7.
При этом формируется корректирующий импульс, который через коммута- тор 13 знака поступит на выход Д устройства, так как в триггере Т записан знак погрешности +, который присутствует на управлякяцем входе коммутатора 13 знака.
Корректирующие импульсы при обработке рассматриваемого участка с постоянной скоростью будут появляться на выходе устройства через k импульсов :
k - h
где h приращение ошибки в единицах дискретности.
Для этого код скорости, записываемый в регистр 22, будет меньше k на единицу.
В точке Cf происходит смена знака приближенного сигнала погрешности и величины кода скорости, так как c fj. зафиксирована в дешифраторе 2, аналогично в точке Cfg . Однако, так как сигнал на управляющем входе коммутатора 13 изменится, то корректирующий импульс появится на выходе Л .
Согласно диаграмме в точке tp происходит реверс перемещения. При этом импульсы, присутствующие на шине -х, вычитаются из счетчика 7 и суммируются в счетчике 6. При равенстве нулю счетчика 7 (это будет в точке tfy ) формируется импульс сброса счетчика 6 и запись кода соседнего участка tpg-cf,в регистр 22. Б точке осуществляется запись кода скорости и знака соседнего (Cfg -(f ) участка в регистр 22. Перед этим состояние счетчика будет равно нулю и задержанньй через элемент 10 задержки импульс сбросит счетчик 6 и запишет код скорости из регистра 22 через элемент И 5 по сигналу строб И 5 с выхода первого элемента И коммутатора 12.
Необходимо отметить, что при использовании устройства в системах ЧПУ, сигналы -« и и - и суммируются с сигналами +i и i соответственно (не показано).
Формула изобретения
1. Устройство для-формирования корректирующих сигналов кинематических погрешностей, содержащее счетчик положения, дешифратор, первый счетчик-делитель.и формирователь импульсов, первый выход которого соединен со входом установки нуля первого счетчика-делителя,выходы счетчика положения подключены к группе входов дешифратора, отличающееся тем, что, с целью упрощения устройства при сохранении его точности, оно содержит блок памятн, второй счетчик-делитель, два элемента И и коммутатор знака, соединенный управляющим входом со знаковым выходом блока памяти который входами соединен с выходами дешифратора, а информационными выходами - с информационными входами первого и второго элементов И, стрсбируюпще входы которых подключены соответст- венно ко второму и первому выходам формирователя импульсов а выходы - к информационным входам первого и второго счетчиков-делителей со-от- ветственко, формирователь импульсоз первым выходом соединен с первым информационным входом коь&г/татора знака, вторым выходом - со входом установки нуля второго счетчика-делителя и вторым информационным вхо- дом коммутатора знака выходы которого являются выходами устройства, формирователь импульсов третьим выходом подключен к вычитающему входу первого счетчика-делителя и сумми- рующему входу второго счетчика-делителя, четвертым выходок - к суммирующему входу первого счетчика-делителя и вычитающему входу второго счетчика-делителя, первьш и второй входы формирователя импульсов соединены с импульсными входами счетчика положения и дешифратора и являются входами устройства, а третий и четвертый входы формирователя импульсов подключены к выходам Равенство нулю первого и второго счетчиков-делителей соответственно.
2. Устройство по п. 1, отличающееся тем, что формиро- ватель импульсов содержит два элемента задержки и дна коммутатора, ка;кдый из которых состоит из двух элементов И, причем первые входы элементов И первого и второго хомкутато ров соединены через соответствующее элементы задержки соответственно с первым и вторым входами формирователя импульсовJ вторые входы элементов И - с третьим н четвертым входами фо1эмирователя импульсов, выходы перных элементов И - со вторЫлМ и первым выходами формирователя импульсов, а выходы вторых элементов И - с третьим м четвертым выходами ват еля И1 1пульсов.
3. Устройство по п. 1, отличаю и; е е с я тем, что блок памяти содержит группу элементов ИЛИ, первый и второй элементы ИЛИ, фор- мировс .тель импульсов, регистр и триггер, причем элементы ИЛИ подключены к шинам, соедкненньм со входами блока паьетти первьм элемент ИЛИ выходо соединен с S-входом триггера, выход которого является знаковьм выходом блока памяти, второй элемент ИЛИ выходом подключен через формирователь импульсов к входам установки нуля триггера и регистра, информационные входы которого соединены с выходами группы элементов Ш1И, а выходы регистра подключены к информационным выходам блока памяти.
4 Устройство по п. I, о т л и - чающееся тем, что дешифратор содержит элементы И-ИЛИ, элементы 2И-Ш1И и два формирователя импульсов причем элементы И-ШШ подключены к группе входов дешифратора, выходы элементов И--ЕПИ соединены с первыми входам:- элементов 2И-ИЛИ, вторые входы которых подключены к выходу первого формирователя импульсов, третьи входы - к выходу второго формирователя импульсов, четвертые входы всех элементов , кроме последнего, соединены с первыми входами последую :1Шх элементов , а четвертый вход последнего элемента 2К-ИЛИ под- кЛ Очен к пepвo ry входу первого элемента 2И-ИЛИ, выходы элементов 2И-ИЛ соединены с вьжодами дешифратора, входы формирователей импульсов подключены к импульсным входам дешифратора.
+Д
.ii
S iqn 9 i3

| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКАНАЛЬНАЯ СИСТЕМА ДЛЯ РЕГИСТРАЦИИ ФИЗИЧЕСКИХ ВЕЛИЧИН | 1991 |
|
RU2037190C1 |
| Преобразователь перемещения в код | 1983 |
|
SU1129635A1 |
| Устройство для централизованного измерения скорости вращения многошпиндельных механизмов планетарного типа | 1984 |
|
SU1216729A1 |
| Многоканальное устройство для сбора данных | 1983 |
|
SU1095163A1 |
| Преобразователь угла поворота вала в код | 1988 |
|
SU1522408A1 |
| Устройство для отображения знакографической информации | 1987 |
|
SU1439673A1 |
| Умножитель частоты | 1990 |
|
SU1797113A1 |
| Устройство автоматической подстройки линейного закона частотной модуляции | 1984 |
|
SU1218463A1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1986 |
|
SU1427412A1 |
| Устройство для испытаний датчиков давления | 1983 |
|
SU1129624A1 |

Изобретение относится к области программного управления станками и предназначено для формирования кор- ректирунлцих сигналов для компенсации систематических ошибок положения кон ечных звеньев станка, вызванных, например, кинематическими погрешностями передач и т.д. Цель изобретения - упрощение устройства при сохранении его точности. Сигнал текущего положения .в зависимости от направления перемещения поступает на шины +i или - i Р этом сигналы поступают на вход счетчика, изменяя его состояние и кодированный сигнал на его выходе, каждому из которых соответствует определенное положение органа станка. При равенстве текущего и запомненного в дешифраторе положений кодов с одного из выходов дешифратора положений поступает сигнал на одну из шин блока памяти. При этом происходит сброс регистра и триггера блока памяти, а затем запись кодированного сигнала скорости в регистр и знака - в триггер. В этой точке (при импульсе записи) первый счетчик-делитель находится в нулевом положении. Первый импульс -i через первый элемент И первого коммутатора осуществляет стробирование записи кода с регистра блока памяти в первый счетчик- делитель и сброс второго счетчика- делителя в О. Далее этот импульс через коммутатор знака проходит на выход + Л устройства. Следующие импульсы на шине -f через первый коммутатор будут вычитаться из содержимого первого счетчика-делителя и суммироваться во втором счетчике- . делителе. При достижении нуля в пер- вом счетчике-делителе следующий импульс через второй коммутатор опять поступит на второй элемент И и обеспечит запись кода скорости из блока памяти и сброс кода во втовом счетчике-делителе. При этом формируется корректирукщий импульс, который через коммутатор знака поступит на выход устройства. 3 з.п. ф-лы, 5 шт. о (Л to IsD 4iib СО to
«)
4)
-/
3aff. K6CfTTfg. UA- уст„ 0 7
cmpoff, L/5 ijcm,,06
rl
„ Styn
Ч-Д -Д
Составитель А.Исправиикова Редактор Н.Слободяник Техред Н.БонкалоКорректор М. Пожо
Заказ 1952/48 Тираж 836Подписное
ВПИИПИ Государственного комитета СССР
по делам изобретений и открытш 113035, MocKBaj Ж-35, Раушская наб.-,, д., 4/5
Производственно-полиграфическое предприятие,, г Ужгород, ул. Проектная, 4
t
| Устройство для регулирования синхронногоХОдА зубООбРАбАТыВАющЕгО CTAHKA | 1978 |
|
SU822772A3 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для измерения перемещений в системах программного управления | 1978 |
|
SU736050A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
