Изобретение относится к машиностроению и может быть использовано в конструкциях механизмов железнодорожной автоматики, а именно стрелочных переводах, шлагбаумах и т.д., также в конструкциях автоматических линий и роботизированных комплексов различных производств для периодического перемещения выходных звеньев. Использование данного устройства позволит повысить надежность устройств автоматики и робототехники.
Известны различные устройства для периодического перемещения брусьев шлагбаумов или остряков стрелочных переводов, включающие электродвигатель, редуктор, механизм преобразования вращательного движения выходного вала редуктора, фрикционные муфты сцепления, автопереключатели и др. элементы системы управления [1]. Основным недостатком таких устройств является низкая надежность из-за большого количества подвижных звеньев, работающих в тяжелых условиях железнодорожного транспорта. Низкая надежность известных устройств объясняется также тем, что при завершении перемещения выходного звена кинетическая энергия подвижных звеньев расходуется на деформирование и изнашивание элементов конструкции и служит источником повышенной вибрации в работе устройств.
Наиболее близким по технической сущности к предлагаемому техническому решению является модуль резонансного манипулятора [2], содержащий установленное на основании в направляющих выходное звено, упругий элемент, установленный между основанием и выходным звеном, фиксаторы крайних положений выходного звена, систему управления и привод.
В такой конструкции отсутствует редуктор и исключено влияние сил инерции на формирование динамических процессов и вибрацию устройства. Однако в этом устройстве при возросшем уровне сил сопротивления перемещению выходного звена (что вполне реально в условиях работы стрелочных переводов или шлагбаумов) возможны его не доход до крайнего положения и неуправляемые последующие движения колебательного характера. Вывод устройства в исходное состояние требует использования специальных приспособлений. Все это указывает на низкую надежность работы модуля манипулятора.
Задачей изобретения является повышение надежности привода.
Это достигается тем, что привод содержит механизм периодического накопления в упругом элементе энергии, включающий соединенную с опорами упругого элемента зубчатую рейку, укрепленные на основании две пары храповых механизмов, при этом у одного механизма каждой пары входное звено укреплено с возможностью вращения, у другого храпового механизма пары неподвижно закреплено, а выходные звенья механизмов каждой пары жестко соединены между собой и на них установлены с возможностью вращения и взаимодействия с рейкой зубчатые колеса и укреплены соединительные муфты для периодического соединения выходных звеньев храповых механизмов с зубчатыми колесами, при этом у храповых механизмов различных пар направление свободного хода взаимно противоположное, механизм накопления энергии содержит также укрепленный на корпусе электромагнит, к якорю которого прикреплен ползун, шарнирно соединенный с двумя распорными звеньями, шарнирно связанными с вращающимися входными звеньями храповых механизмов.
На чертеже показана схема магнитопружинного привода.
Привод включает корпус (на чертеже не показан), в котором выполнены направляющие 1, в которых перемещается тяга 2 с укрепленными на ней опорами 3, 4 пружины 5. В корпусе выполнены также направляющие 6, в которых размещен ползун 7, содержащий опоры 8, 9 пружины 5.
Механизм фиксации тяги 2 включает опору 10 с укрепленной на ней муфтой свободного хода 11 двустороннего действия со звеном управления - поводком 12, взаимодействующим с приводом 13, функции которого может выполнять, например, электромагнит. Обойма 14 муфты 11 содержит закрепленное зубчатое колесо 15, взаимодействующее с укрепленной на тяге 2 рейкой 16.
Механизм накопления энергии содержит электромагнит 17, якорь 18 которого связан с ползуном 19, перемещающимся в выполненных в корпусе направляющих 20, а также две опоры 21, 22 с закрепленными на них попарно обгонными муфтами 23, 24 и 25, 26, при этом звездочка 27 обгонной муфты 23 и звездочка 28 обгонной муфты 25 укреплены соответственно на опорах 21 и 22 с возможностью вращения, а звездочки 29 и 30 обгонных муфт 24, 26 закреплены неподвижно. Обгонные муфты, укрепленные на одной опоре, имеют одинаковое направление свободного хода, а у муфт разных опор направление свободного хода взаимно противоположное.
Пара звездочек 27, 29 имеет общую обойму 31, а пара 28, 30 имеет общую обойму 32. На обойме 31 закреплено с возможностью вращения зубчатое колесо 33, зацепляющееся с укрепленной на ползуне 7 рейкой 34, а на обойме 32 закреплено с возможностью вращения и зацепляющееся с рейкой 34 зубчатое колесо 35.
Механизм накопления энергии включает также управляемую муфту 36 для периодического соединения обоймы 31 с зубчатым колесом 33 и управляемую муфту 37 для периодического соединения обоймы 32 с зубчатым колесом 35.
К ползуну 19 шарнирно прикреплены два распорных звена 38, 39, шарнирно связанных с рычагами 40, 41, укрепленными на звездочках 27, 28. Привод 13, управляемые муфты 36 и 37 соединены электрически с системой управления 42, включающей также датчики 43, 44 положений тяги 2 и ползуна 7. В случае использования магнитопружинного привода в конструкции стрелочного перевода к тяге 2 с помощью рычага 45 может быть прикреплен остряк 46.
Устройство работает следующим образом. В исходном положении тяга 2 находится в одном из двух крайних положений, например в крайнем левом. Пружина 5 находится в сжатом состоянии между опорой 4 тяги 2 и опорой 8 ползуна 7. Пружина 5, воздействуя на опору 4 тяги 2, стремится переместить ее в направлении слева направо, но обгонная муфта 11 через рейку 16 и зубчатое колесо 15 препятствует этому. Пружина 5 через опору 8 стремится сдвинуть ползун 7 в направлении справа налево, а обгонная муфта 24, имеющая направление свободного хода обоймы 29 в направлении по часовой стрелке и взаимодействующая с ползуном 7 через рейку 34, зубчатое колесо 33, муфту 36, препятствует этому.
Если есть необходимость в увеличении запаса энергии в пружине 5, то по команде блока управления 42 включается муфта 37 и зубчатое колесо 35 отсоединяется от обоймы 32. Далее по команде блока управления 42 включается электромагнит 17 и якорь 18 вместе с ползуном 19 начинает совершать возвратно-поступательные перемещения. При перемещении ползуна 19 сверху вниз распорное звено 38 перемещает рычаг 40 вместе со звездочкой 27 обгонной муфты 23 в направлении по часовой стрелке. В этом же направлении вместе со звездочкой 27 вращается обойма 31 и зубчатое колесо 33, перемещая рейку 34 в направлении слева направо. При этом опора 8 сближается с опорой 4 и пружина 5 сжимается, увеличивая запас потенциальной энергии. При перемещении ползуна 19 вверх распорное звено 38 перемещает рычаг 40 вместе со звездочкой 27 обгонной муфты 23 в направлении против часовой стрелки, чему не препятствует обойма 31, удерживаемая в неподвижном состоянии с помощью неподвижной звездочки 29 муфты 24. Распорное звено 39, взаимодействующее через рычаг 41 со звездочкой 28 и обоймой 32, при перемещении ползуна 19 сверху вниз и снизу вверх не препятствует движению ползуна 7, т.к. обойма 32 с помощью муфты 37 отсоединена от зубчатого колеса 35, вращающегося при перемещении рейки 34 ползуна 7. При достижении необходимого уровня энергии по сигналу датчика 44 система управления 42 выключает электромагнит 17 и муфту 37. При этом зубчатое колесо 35 присоединяется к обойме 32.
Для выполнения перемещения тяги 2 в направлении слева направо по команде системы управления 42 включается привод 13, который перемещает поводок 12 и, тем самым, меняется направление свободного хода муфты 11. После этого тяга 2 под воздействием на опору 4 силы пружины 5 начинает движение в направлении слева направо. Смещению опоры 8 вместе с ползуном 7 в направлении справа налево через рейку 34 и зубчатое колесо 35 препятствует обгонная муфта 24. После совмещения опор 3 и 8, а также 4 и 9 опоры 4 и 8 освободятся от пружины 5, начинается сжатие пружины 5 опорами 3, 9 и торможение тяги 2. Смещению опоры 9 вместе с ползуном 7 в направлении слева направо препятствует обгонная муфта 26.
После остановки тяги 2 пружина 5 через опору 3 будет стремиться переместить тягу 2 в направлении справа налево, но обгонная муфта 11 через зубчатую передачу 15-16 препятствует этому.
Для выполнения обратного движения в направлении справа налево запасенной при торможении энергии в пружине 5 недостаточно. Уровень недостаточности энергии устанавливается по показаниям датчиков 43, 44, определяющих величину сжатия пружины 5. Поэтому необходимо выполнить операции по накоплению необходимого уровня энергии.
Для этого по команде блока управления 42 включается муфта 36 и зубчатое колесо 33 отсоединяется от обоймы 31. Далее по команде блока управления 42 включается электромагнит 17 и якорь 18 вместе с ползуном 19 начинает совершать возвратно-поступательные перемещения. При перемещении ползуна 19 сверху вниз распорное звено 39 перемещает рычаг 41 вместе со звездочкой 28 обгонной муфты 25 в направлении против часовой стрелки. В этом же направлении вместе со звездочкой 28 вращается обойма 32 и зубчатое колесо 35, перемещая рейку 34 в направлении справа налево. При этом опора 9 сближается с опорой 3 и пружина 5 сжимается, увеличивая запас потенциальной энергии. При перемещении ползуна 19 вверх распорное звено 39 перемещает рычаг 41 вместе со звездочкой 28 обгонной муфты 25 в направлении по часовой стрелке, чему не препятствует обойма 32, удерживаемая в неподвижном состоянии с помощью неподвижной звездочки 30 муфты 26. Распорное звено 38, взаимодействующее через рычаг 40 со звездочкой 27 и обоймой 31, при перемещении ползуна 19 сверху вниз и снизу вверх не препятствует движению ползуна 7, т.к. обойма 31 с помощью муфты 36 отсоединена от зубчатого колеса 33, вращающегося при перемещении рейки 34 ползуна 7. При достижении необходимого уровня энергии по сигналу датчика 43 система управления 42 выключает электромагнит 17 и муфту 36. При этом зубчатое колесо 33 присоединяется к обойме 31.
Наличие системы управления, включающей датчики положения звеньев, позволяет фиксировать изменения условий эксплуатации (при изменении сил сопротивления перемещению выходного звена изменится и ход выходного звена) и определять необходимое увеличение энергии, накапливаемой в упругом элементе.
Использование магнитопружинного привода, структура которого включает электромагнит, две пары храповых механизмов и систему рычагов, связывающих электромагнит и храповые механизмы, позволяет накапливать в упругом элементе необходимое количество энергии с учетом изменений условий эксплуатации, что обеспечит перемещение выходного звена на необходимое расстояние.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПЕРИОДИЧЕСКОГО ПЕРЕМЕЩЕНИЯ | 2003 |
|
RU2254975C1 |
| Коробка передач | 1983 |
|
SU1191656A1 |
| Швейный полуавтомат для шитья по контуру | 1989 |
|
SU1730280A1 |
| Привод электротехнического аппарата | 1975 |
|
SU652622A1 |
| ИНЕРЦИОННЫЙ МЕХАНИЧЕСКИЙ ПРУЖИННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРИЧЕСКИМ УПРАВЛЕНИЕМ ДЛЯ ПОЛУЧЕНИЯ ЭНЕРГИИ | 1999 |
|
RU2151323C1 |
| Устройство для маркировки плоских изделий | 1982 |
|
SU1134385A1 |
| МАШИНА ДЛЯ ИЗГОТОВЛЕНИЯ ПРОСЕЧНО-ВЫТЯЖНОЙ СЕТКИ ИЗ ЛИСТОВОГО МАТЕРИАЛА | 2001 |
|
RU2198758C2 |
| РЕКУПЕРАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2117836C1 |
| МЕХАНИЗМ ФИКСИРОВАНИЯ ДИАФРАГМЫ | 1992 |
|
RU2020529C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1990 |
|
RU2013217C1 |
Изобретение относится к машиностроению и может быть использовано в конструкциях механизмов железнодорожной автоматики, а именно стрелочных переводах, шлагбаумах и т.д., также в конструкциях автоматических линий и роботизированных комплексов различных производств для периодического перемещения выходных звеньев. Магнитопружинный привод включает установленное на основании в направляющих выходное звено, опоры упругого элемента, упругий элемент, установленный между одной из опор и выходным звеном, фиксаторы крайних положений выходного звена, систему управления. Привод также содержит механизм периодического накопления в упругом элементе энергии, включающий соединенную с опорами упругого элемента зубчатую рейку, укрепленные на основании две пары храповых механизмов. При этом у одного механизма каждой пары входное звено укреплено с возможностью вращения. У другого храпового механизма пары входное звено неподвижно закреплено. Выходные звенья механизмов каждой пары жестко соединены между собой и на них установлены с возможностью вращения и взаимодействия с рейкой зубчатые колеса и укреплены соединительные муфты для периодического соединения выходных звеньев храповых механизмов с зубчатыми колесами. При этом у храповых механизмов различных пар направление свободного хода взаимно противоположное. Механизм накопления энергии содержит также укрепленный на корпусе электромагнит, к якорю которого прикреплен ползун, шарнирно соединенный с двумя распорными звеньями, шарнирно связанными с вращающимися входными звеньями храповых механизмов. Технический результат: повышение надежности привода. 1 ил.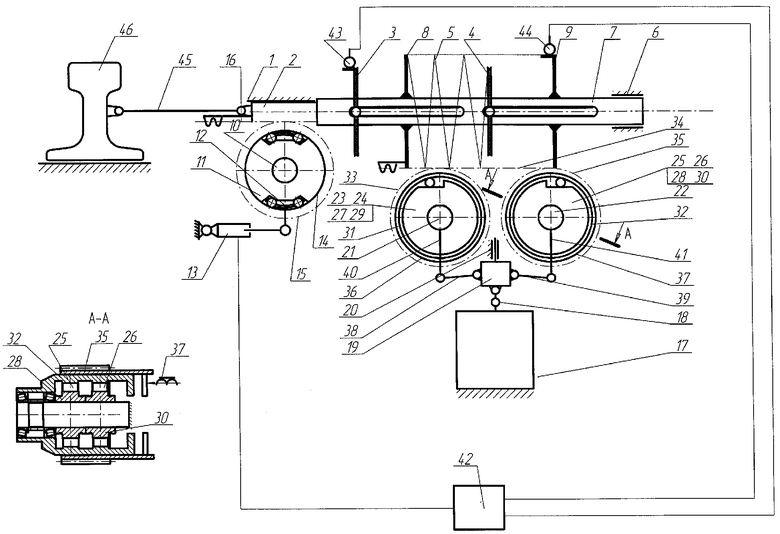
Магнитопружинный привод, включающий установленное на основании в направляющих выходное звено, опоры упругого элемента, упругий элемент, установленный между одной из опор и выходным звеном, фиксаторы крайних положений выходного звена, систему управления, отличающийся тем, что привод содержит механизм периодического накопления в упругом элементе энергии, включающий соединенную с опорами упругого элемента зубчатую рейку, укрепленные на основании две пары храповых механизмов, при этом у одного механизма каждой пары входное звено укреплено с возможностью вращения, у другого храпового механизма пары неподвижно закреплено, а выходные звенья механизмов каждой пары жестко соединены между собой и на них установлены с возможностью вращения и взаимодействия с рейкой зубчатые колеса и укреплены соединительные муфты для периодического соединения выходных звеньев храповых механизмов с зубчатыми колесами, при этом у храповых механизмов различных пар направление свободного хода взаимно противоположное, механизм периодического накопления в упругом элементе энергии содержит также укрепленный на корпусе электромагнит, к якорю которого прикреплен ползун, шарнирно соединенный с двумя распорными звеньями, шарнирно связанными с вращающимися входными звеньями храповых механизмов.
| Модуль резонансного манипулятора | 1988 |
|
SU1611730A1 |
| Электропривод стрелочного перевода | 1987 |
|
SU1527061A1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| СА 1189180 А1, 18.06.1985 | |||
| GB 171441 А, 15.11.1921. | |||

