Изобретение относится к приборостроению и может быть использовано в качестве элемента л риводных систем приборов, в частности лентопротяжных механизмов видео-и магнитофонов.
Известна передача гибкой связью с натяжным устройством, в которой натяжное устройство содержит двуплечий качающийся рычаг, на одном из концов которого размещен натяжной ролик, а на другом - груз. Натяжной ролик располагается так, чтобы
при вытяжке ремня угол обхвата на шкивах увеличивался.
Недостатком такого устройства является то, что дополнительное натяжение ремня обеспечивается грузом постоянного веса, т.е. тяговая способность передачи определяется лишь величиной этого груза и не изменяется с изменением момента нагрузки. В связи с этим при малых моментах нагрузки предварительное натяжение имеет завы- шенную величину, что приводит к
увеличению напряжения в материале ремня и к ускоренному его разрушению. Кроме того, передача с таким натяжным устройством требует определенной ориентации в пространстве.
Известно устройство, содержащее ведущий и ведомый шкивы, неравноплечий рычаг с двумя натяжными роликами и охватывающую их гибкую связь.
Данное устройство обладает свойством самонатяжения при переменных возмущающих моментах нагрузки, может занимать произвольное положение в пространстве, однако не способно работать в режиме реверса.
Наиболее близка к предлагаемой конструкция передачи гибкой связью, содержащая ведущий и ведомый шкивы, размещенную на линии, соединяющей их центры, ось, установленный-на ней с воз- можностью поворота рычаг, размещенные на его плечах натяжные ролики и охватывающую последовательно одий из шкивов, первый натяжной ролик, другой шкив и второй натяжной ролик, гибкую связь.
Функционирование такой передачи эффективно лишь в узком диапазоне изменяе- мых нагрузок и при малом разбросе геометрических параметров передачи и механических свойств материала гибкой свя- зи. Относительное приращение длины контура гибкой связи зависит от соотношения геометрических размеров самой передачи, размещения оси качания двуплечего рычага и длины его плеч. Однако жесткие требования к размещению оси рычага с целью достижения максимума эффекта самонатяжения при прочих равных условиях ограничивают допустимый разброс параметров передачи. Кроме to го, в такой передаче натяжение ветвей полностью воспринимается опорой ведомого шкива, что увеличивает нагрузку на нее и, следовательно, снижает долговечность и точностные характеристики (характер посадки вследствие износа и деформации сопрягаемых элементов).
Цель изобретения - расширение кинематических возможностей передачи гибкой связью за счет увеличения диапазона регулирования тяговой способности.
Предложенная передача гибкой связью, содержащая основание, ведущий и ведомый шкивы, размещенную- на линии, соединяющей их центры, ось, установленный на ней с возможностью поворота дву- плечий рычаг, размещенные на его свободных концах натяжные ролики и гибкую связь, последовательно взаимодействующую с одним из шкивов, первым
натяжным роликом, другим шкивом и вторым натяжным роликом, согласно изобретению снабжена дополнительным рычагом, жестко связанным одним концом в месте расположения оси с двуплечим рычагом, осью, расположенной в основании на продолжении линии, соединяющей центры шкивов и основной оси, парой натяжных роликов, расположенных по одну сторону с внешних сторон дуг обхвата ведущего и ведомого шкивов, один из которых установлен на свободном конце дополнительного рычага, а другой - на дополнительной оси, и гибкой связью, охватывающей последовательно один из дополнительных роликов, ведущий, ведомый шкивы и другой дополнительный ролик, причем продольная жесткость дополнительной гибкой связи выбрана большей продольной жесткости основной гибкой связи.
В рабочем режиме, передачи при изменении (например, увеличении) момента сопротивления на ведомом шкиве 3 происходит поворот двуплечего рычага, а следовательно, и дополнительного рычага 4, что сопровождается удалением центра От дополнительного ролика 8 от центра От ведущего шкива 2. Последнее обстоятельство приводит к изменению (увеличению) натяжения дополнительной гибкой связи 10, а значит, и к изменению (увеличению) прижатия основной гибкой связи в зонах их контакта к поверхности шкивов 2 и 3. Таким образом, увеличение нагрузки на ведомом шкиве 3 обеспечивает увеличение сил сцепления между основной гибкой связью 9 и поверхностями ведущего 2 и ведомого 3 шкивов передачи и, тем самым, увеличение верхнего предела диапазона регулирования ее тяговой способности, а следовательно, его расширение.
Усилие прижатия возрастает с увеличением момента сопротивления на ведомом шкиве, увеличивая тем самым тяговую способность передачи. Причем верхний предел диапазона регулирования тяговой способности ограничен лишь величинами продольной жесткости и прочности дополнительной гибкой связи 10.
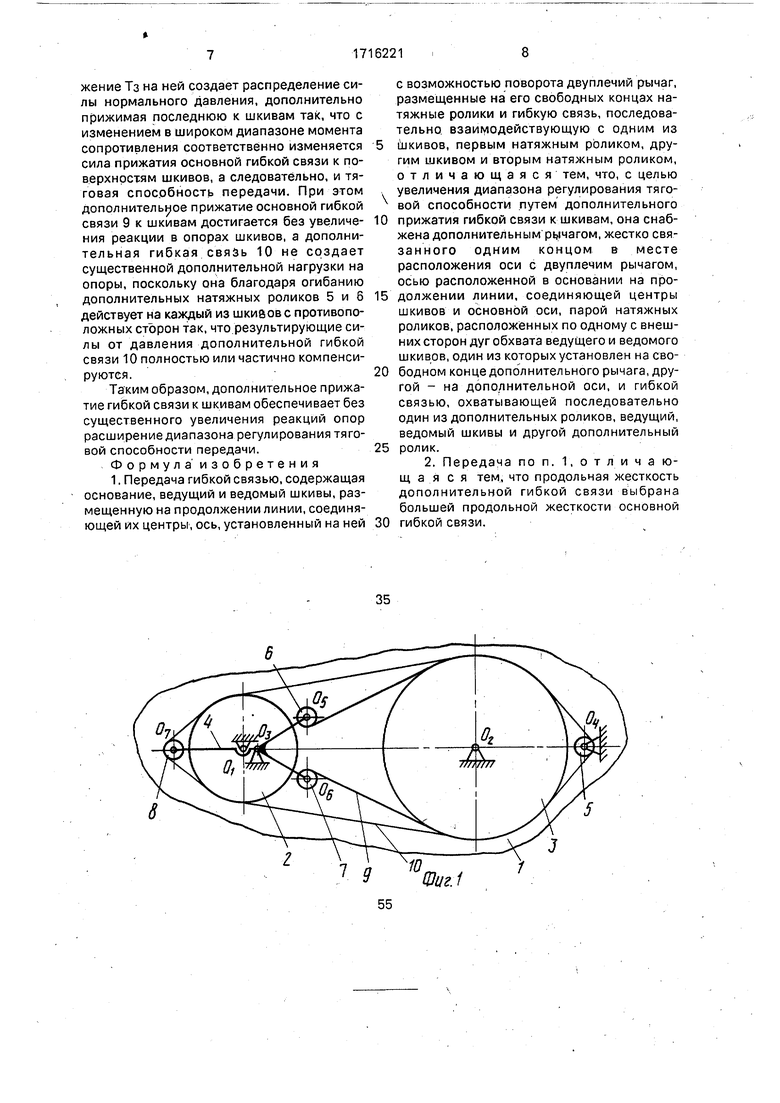
На фиг. 1 изображена кинематическая схема передачи гибкой связью; на фиг. 2 - схема передачи в рабочем режиме.
Передача гибкой связью содержит основание, в котором посредством.валиков установлены ведущий 2 и ведомый 3 шкивы, а посредством осей - симметричный двуплечий рычаг с дополнительным рычагом 4 и первым дополнительным натяжным роликом 5 с центрами соответственно От, 02, Оз, 04. На осях симметричных плеч двуплечего
рычага установлены натяжные ролики 6 и 7 с центрами Os, Qe, а на дополнительном рычаге 4 размещена ось второго дополнительного ролика 8 с центром От. Основная гибкая связь 9 последовательно огибает ведущий шкив 2, натяжной ролик 6, ведомый шкивЗ и натяжной ролик7. Дополнительная гибкая связь 10 охватывает первый дополнительный ролик 5, ведущий 2 и ведомый 3 шкивы, а также второй дополнительный натяжной ролик 8.
Передача гибкой связью работает следующим образом.
В режиме холостого хода. В указанном режиме натяжения ведущей TI (см. фиг. 2) и ведомой Т2 ветвей основной гибкой связи 9 равны по модулю поскольку, если не учитывать потерь, момент нагрузки на ведомом шкиве отсутствует.х
Натяжение дополнительной гибкой связи 10 также постоянно по контуру и равно Тз. При этом натяжения Ti и Т2 равны предварительному натяжению Тю основной гибкой связи 9, а натяжение Тз предварительному натяжению Тзо дополнительной гибкой связи 10, которые задаются независимо друг от друга (основной гибкой связи-межцентровым расстоянием Oi02, a дополнительной - расстоянием 040 при прочих равных условиях). Для натяжных ролика 6 и 7, установленные на симметричных плечах рычага, огибаются соответственно ведущей и ведомой ветвями основной гибкой связи и, следовательно, на ролик 6 действует результирующая сила Tva на ролик
1
7-Т2 . На дополнительный натяжной ролик
8действует результирующая сила Тз, вызванная натяжением Тз дополнительной гибкой связи 10.
Поскольку плечи двуплечего рычага, на котором установлены натяжные ролики б и 7, расположены симметрично относительно межцентровой линии Оз04, то плечи hi и h2
сил TI и Т2 соответственно равны между собой. Равны между собой также и модули
сил/тЦи JT2|, следовательно, равны также и моменты MI и Ma от этих сил относительно точки Оз поворота двуплечего рычага k . ч
Mi TJhi,(1)
M2 T2h2(2)
Вектор результирующей силы Тз направлен кцен-fpyOi ведущего шкива2, поскольку его составляющие Тз равны между собой и направлены по касательным к окружности
этого шкива. Значит сила Тз не образует момента относительно оси Оз качания рычага, так как плечо Ьз этой силы равно нулю.
i 0
5
0 5 0
5
0
5
ч
0
g
поскольку центр Oi лежит на продольной оси ОзО дополнительного рычага 4.
Таким образом, в режиме холостого хода на двуплечий рычаг действуют лишь два равных по величине и противоположных по знаку момента Mi и М2 и, следовательно, он, находясь в покое, расположен симметрично относительно линии центров шкивов.
В рабочем режиме. В этом режиме ведомый шкив 3 нагружен полезным моментом сопротивления Мс, вследствие чего натяжение ведущей ветви Ti гибкой связи имеет большее значение, чем ведомой ветви Та, Ti Т2. Это условие обеспечивает неравенство моментов Mi М2 и, следовательно, поворот двуплечего рычага на угол д . При этом Mi является движущим моментом, а тормозным. Однако при повороте рычага результирующая сила Тз, будучи;всегда направленной к центру От, образует йа плече пз момент Мз, стремящийся повернуть рычаг в исходное симметричное положение, обеспечивая его устойчивость. Следовательно, условие равновесия рычага в этом случае запишется в виде
Мт М2 + Мз .(3)
При этом поскольку длина плеча ОзОр-боль- ше радиуса ведущего шкива R, а центр качания Оз рычага смещен,относительно центра ведущего шкива 2 на величину X, то при повороте рычага 4 центр От дополнительного натяжного ролика 8 будет удаляться от центра От, осуществляя натяжение дополнительной гибкой связи 10 силой Тз. Дополнительная гибкая связь 10 имеет большую продольную жесткость, поэтому при малом повороте рычага, а значит, и малых ее деформациях, сила Тз принимает большие значения. Однако, возникающий при этом момент сопротивления Мз в силу малости плеча Ьз также мал. Кроме того, увеличение плеча Из, как следует из геометрии передачи, в процессе поворота рычага сопровождается увеличением плеча hi силы TI, создающей движущий момент Мч и уменьшением плеча ti2 силы Т2, образующей тормозной момент М2. Поворот рычага может быть осуществлен малым моментом Д М MI - М2, а значит, управление больт-1
шои величиной силы Тз производится малой разностью результирующих сил натяжения ведущей Ti и ведомой Т2 ветвей основной
гибкой связи. При этом величина силы Тз ограничивается лишь жесткостью и прочностью дополнительной гибкой связи 10. Так как дополнительная гибкая связь 10 огибает ведущий 2 и ведомый 3 шкивы, то в зонах ее контакта с основной гибкой связью 9 натяжение Тз на ней создает распределение силы нормального давления, дополнительно прижимая последнюю к шкивам так, что с изменением в широком диапазоне момента сопротивления соответственно изменяется сила прижатия основной гибкой связи к поверхностям шкивов, а следовательно, и тяговая способность передачи. При этом дополнительное прижатие основной гибкой связи 9 к шкивам достигается без увеличения реакции в опорах шкивов, а дополнительная гибкая связь 10 не создает существенной дополнительной нагрузки на опоры, поскольку она благодаря огибанию дополнительных натяжных роликов 5 и 6 действует на каждый из шкивов с противоположных сторон так, что.результирующие силы от давления дополнительной гибкой связи 10 полностью или частично компенсируются.
Таким образом, дополнительное прижатие гибкой связи к шкивам обеспечивает без существенного увеличения реакций опор расширение диапазона регулирования тяговой способности передачи.
Формула изобретения 1. Передача гибкой связью, содержащая основание, ведущий и ведомый шкивы, размещенную на продолжении линии, соединяющей их центры, ось, установленный на ней
V
с возможностью поворота двуплечий рычаг, размещенные на его свободных концах натяжные ролики и гибкую связь, последовательно, взаимодействующую с одним из шкивов, первым натяжным роликом, другим шкивом и вторым натяжным роликом, отличающаяся тем, что, с целью увеличения диапазона регулирования тяговой способности .путем дополнительного
0 прижатия гибкой связи к шкивам, она снабжена дополнительным рычагом, жестко свя- занного одним концом в месте расположения оси с двуплечим рычагом, осью расположенной в основании на про5 должении линии, соединяющей центры шкивов и основной оси, парой натяжных роликов, расположённых по одному с внешних сторон дуг обхвата ведущего и ведомого шкивов, один из которых установлен на сво0 бодном конце дополнительного рычага, другой - на дополнительной оси, и гибкой связью, охватывающей последовательно один из дополнительных роликов, ведущий, ведомый шкивы и другой дополнительный
5 ролик.
2. Передача по п. 1, о т л и ч а ю- щ а я с я тем, что продольная жесткость дополнительной гибкой связи выбрана большей продольной жесткости основной
0 гибкой связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАТЯЖЕНИЯ ПЕРЕДАЧИ ГИБКОЙ СВЯЗЬЮ | 2008 |
|
RU2509934C2 |
| Передача гибкой связью | 1986 |
|
SU1465663A1 |
| НАТЯЖНОЕ УСТРОЙСТВО РЕМЕННОЙ ПЕРЕДАЧИ | 1992 |
|
RU2088820C1 |
| НАТЯЖНОЕ УСТРОЙСТВО | 2003 |
|
RU2243430C1 |
| РЕМЕННАЯ ПЕРЕДАЧА | 1999 |
|
RU2159882C1 |
| Передача с гибкой связью | 1986 |
|
SU1427119A1 |
| Ременная передача | 2024 |
|
RU2831036C1 |
| Привод ведущих колес транспортного средства | 1985 |
|
SU1248878A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
| Упруго-предохранительная центробежная муфта | 1975 |
|
SU608024A1 |

Изобретение относится к средствам передачи движения в приводных системах приборов, в частности к лентопротяжным механизмам видео- и магнитофонов. Цель изобретения - увеличение диапазона регулирования тяговой способности путем дополнительного прижатия гибкой .связи к шкивам. Передача гибкой связью содержит основание, ведущий и ведомый шкивы, размещенную на линии, соединяющей их цент- , : С ры, ось, установленный на ней с возможностью поворота двуплечий рычаг, расположенные на его свободных концах натяжные ролики и гибкую связь, последовательно взаимодействующую с одним из шкивов, первым натяжным роликом, другим шкивом и вторым йатяжным роликом. Передача гибкой связью снабжена дополнительным рычагом, жестко связанным-одним концом в месте расположения оси с двуплечим рычагом осью, размещенной в основании на продолжении линии, соединяющей центры шкивов и основной оси, парой натяжных роликов, расположенных по одну сторону с внешних сторон дуг обхвата ведущего и ведомого шкивов, один из которых установлен на свободном конце дополнительного рычага, а другой - на.дополнительной оси, и гибкой связью, охватывающей последовательно один из дополнительных роликов, ведущий, ведомый шкивы и другой дополнительный ролик, причем продольная жесткость дополнительной гибкой связи выбрана большей продольной жесткости основной гибкой связи. 1 з.п. ф-лы,2.ил. сл о N3 Ю
8
5
| Заблонский К.И | |||
| Детали машин | |||
| - Киев: Вища школа, 1985, с.131 | |||
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ВЛАГОПРОВОДНОСТИ ПОРИСТЫХ МАТЕРИАЛОВ | 1967 |
|
SU222722A1 |
| Передача гибкой связью | 1986 |
|
SU1465663A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
