(54) ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР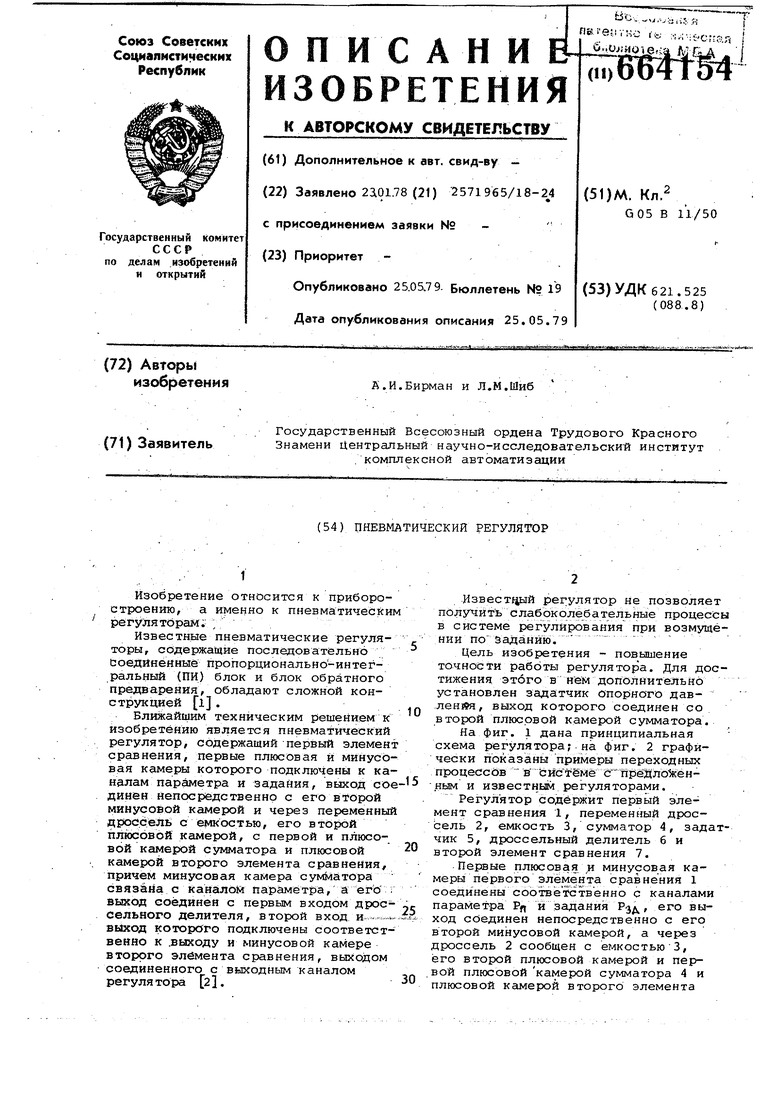
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический финитный регулятор | 1988 |
|
SU1522151A1 |
| Пневматический регулятор | 1978 |
|
SU926616A1 |
| Пневматический регулятор | 1989 |
|
SU1716481A1 |
| Устройство для управления процессом каталитического алкилирования | 1979 |
|
SU905799A1 |
| Пневматический пропорционально-интегральный регулятор | 1989 |
|
SU1659978A1 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| Пневматический регулятор | 1987 |
|
SU1474589A1 |
| Пневматическое устройство прямого предварения | 1979 |
|
SU898442A1 |
| Пневматический регулятор с переменной структурой | 1977 |
|
SU684508A1 |
| Пневматический регулятор | 1982 |
|
SU1040466A1 |
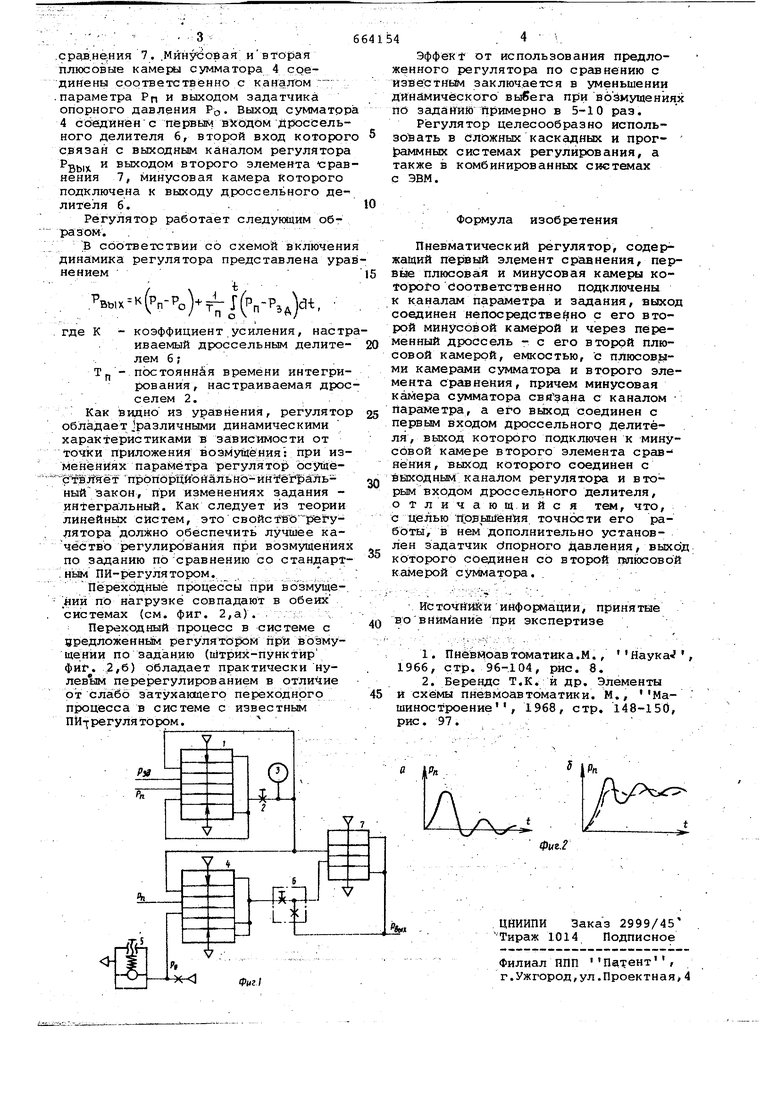
.1 изобретение относится к приборостроению, а именно к пневматически регулятсэрам; , Известные пневматические регуляторы, содержащие последовательно Соединённые пропорционально-интегральный (ПИ) блок и блок обратного предварения, обладают сложной конструкцией l . Ближайшим техническим решением к изобретению яв.г1яется пневматический регулятор, содержащий первый элемен сравнения, первые плюсовая и минусовая камеры которого подключены к ка налам параметра и задания, выход со дивен непосредственно с его второй минусовой камерой и через переменный дроссели с емкостью, его второй плюсовой камерой, с первой и плюсовой камерой сумматора и плюсовой камерой второго элемента сравнения, причем минусовая камера сумматора связана с каналом парамётра, а его выход соединен с первым входом дроссельного делителя, второй вход и . .- которого подключены соответственно к .выходу и минусовой камере второго элемента сравнения, выходом соединенного с выходным каналом регулятора iz. Известчргй регулятор Не позволяет ПОЛУЧИТЬ Слабоколебательные процессы в системе регулирования при возмущении по заданию. Цель изобретения - повышение точности работы регулятора. Для достижения этого в нем дополнительно установлен задатчик опорного дав,, выход которого соединен со второй плюсовой камерой сумматора. На фиг. 1 дана принципиальная схема регулятора; на фиг. 2 графически показаны примеры переходных процесс Ов в с йСтёмё е™ прейло ённым и и зв ее т ньам регуляторами. Регулятор содержит первый элемент сравнения 1, переменный дроссель 2, емкость 3, сумматор 4, задатчик 5, дроссельный делитель 6 и второй элемент сравнения 7. Первые плюсовании минусовая камеры первого элемента сравнения 1 соединены соответственно с каналами параметра РП и задания РЗА бго выход соединен непосредственно с его второй минусовой камерой, а через дроссель 2 сообщен с емкостью3, его второй плюсовой камерой и первой плюсовойкамерой сумматора 4 и плюсовой камерой второго элемента . ; - -3 - . .срав.нения 7. .Минусовая; ивторая плюсовые камержл сумматора 4 соединены соответственно с каналом::: ; .параметра РП и выходом задатчика опорного давления PQ. Выход сумматор 4 соединенс первым вводом дроссельного делителя 6, второй вход которог связан с выходным каналом регулятора выходом второго элемента срав нения 7, минусовая камера которого подключена к выходу дроссельного делителя б. Регулятор работает следукхцим образом. . В соответствии со схемой вклк)чени динамика регулятора представлена ура нением .Ль,(р,-Р„):р1-|()а, где К - коэффициент усиления, настр иваемый дроссельным делителем б; Т., - постоянная времени интегрирования, настраиваемая дрос селем 2. Как ввдно из уравнения, регулятор обладает различными динамическими характеристиками в зависимости от точки приложения воэмушёния: при изменениях парайёгра регулятбг5 осушё с вШёт пропб ЬцйЬнальНо-йн ёГ:ральный закон, при изменениях задания интегральный. Как следует из теории линейньк систем, это свойстВб регулятора должно обеспечить лучшее качёствЪ регулирования при возмущениях по заданию по сравнению со стандар-г:ним ПЙ-рёгулятором.. Переходные процессы при возмуще-. НИИ по нагрузке совпадают в обеих системах (см. фиг. 2,а).: ; , Переходный процесс в системе с предложенньгм регулято йэм при возмущении по заданию (штрих-пунктир фиг. .2,6) обладает практически нулевым перерегулированием в отличие от слабо затухающего переходного процесса в системе с известным ПЙ- регуля тором.
РЛ
Рп
:
V 4. 4 V Эффект от использования предложенного регулятора по сравнению с известным заключается в уменьшении Динамического выбега П1эи возмущениях по заданию Примерно в 5-10 раз. Регулятор целесообразно использовать в сложных каскадHfcjx и программных системах регулирования, а также в комбинированных системах с ЭВМ. Формула изобретения Пневматический регулятор, содержащий первый элемент сравнения, первые плюсова1Я и Минусовая камеры коtopoi-o соответственно подключены к каналам параметра и задания, выход соединен непосредствейно с его второй минусовой камерой и через переменный дроссель - с его второй плюсовой камерой, емкостью, с плюсов,ыми камерами сумматора и второго элемента сргшнения, причем минусовая камера сумматора связана с каналом параметра, а его выход соединен с первым входом дроссельного делителя, выход которого подключен к минусовой камере второго элемента срав нения, выход которого соединен с ё аходнда каналом регулятора и вторым входом дроссельного делителя, о т л и ч а ю щи и с я тем, что, с целью гговьштёнйя точности его работы, в нем дополнительно установлен задатчик Опорного давления, выход которого соединен со второй пяксовой камерой сумматора. йсгочгнШИ информации, принятые вовнимание при экспертизе 1.Пнёвноавтоматика.М., Наука , 1966, стр. 96-104, рис. 8. 2.Берендс Т.К. и др. Элементы и схемы пневмоавтоматики. М,, Машиностроение, 1968, стр. 148-150, рис. 97.
