Изобретение относится к машиностроению и может быть использовано в испыта- тельной технике при механических испытаниях материалов и конструкций, а также в манипуляторах при осуществлении поступательного или вращательного перемещения исполнительного органа.
Известно устройство для перемещения объектов, содержащее охватываемую и охватывающую детали с радиальными пазами и установленную в этих пазах шпонку. Шпонка установлена в пазах с возможностью радиального перемещения и имеет привод такого перемещения, что позволяет размыкать соединение охватываемой и охватывающей деталей.
Это устройство обеспечивает лишь вращательное перемещение объектов и остановку ведомого звена при вращении ведущего. .
Известно устройство для перемещения объектов, содержащее корпус с продольным пазом, установленную в корпусе с возможностью поступательного перемещения гайку, имеющую радиальный паз, взаимодействующей с гайкой винт и установленную в радиальном пазу шпонку. Радиальный паз гайки выполнен с дном, шпонка в этом пазу установлена подвижно.
Устройство сообщает исполнительному объекту только поступательное перемещение.
Известно устройство для перемещения объектов, включающее корпус, вращающийся винт передачи винт-гайка, гайку, выполненную на одном конце пустотелого штока, на втором конце которого жестко закреплен крепежный элемент, шпонку, закрепленную на корпусе и взаимодействующую с продольным пазом на наружной поверхности штока.
Устройство сообщает штоку только поступательное перемещение.
Наиболее близким по технической сущности к предлагаемому изобретению является устройство для перемещения объектов, содержащее корпус, установленный в нем
возможностью вращения пустотелый винт, установленное соосно винту выходное звено в виде пустотелого штока и выполненную за одно целое со штоком гайку, взаимодействующую с винтом, при этом шток с помощью шпонки поочередно соединяется то с корпусом, то с винтом, имеющим продольный паз.
Устройство позволяет переходить с режима поступательных перемещений на режим вращательного движения. Однако продольные пазы, выполненные на наружной поверхности винта, перерезают витки резьбы, расчленяют их на отдельные участки, вследствие чего существенно снижается нагрузочная способность передачи винт- гайка, а следовательно, и всего устройства в целом. В результате обмятия участков подвижной шпонки, входящих в продольные
пазы корпуса и винта, с течением времени нарушается подвижность шпонки в радиальном пазу гайки, устройство становится неработоспособным.
Цель изобретения - повышение нагрузочной способности.
Поставленная цель достигается тем, что в известном устройстве для перемещения объектов, содержащем корпус, установленный в нем с возможностью вращения пустотелый винт, установленное соосно винту выходное звено в виде пустотелого штока и выполненную за одно целое со штоком гайку, взаимодействующую с винтом, в корпусе выполнен радиальный сквозной
паз. на наружной поверхности штока выполнен радиальный сквозной и продольный пазы, на внутренней поверхности - радиальные выступы, а само оно снабжено цилиндрическим переходником, состоящим из двух частей, одна из которых размещена в полости винта с возможностью осевого перемещения, а другая часть - в полости штока и имеет на наружной поверхности кольцевую канавку, предназначенную для взаимодействия с радиальными выступами штока, и продольный паз, двумя шпонками, одна из которых закреплена в
сквозном радиальном пазу штока и предназначена для взаимодействия с продольным пазом второй части цилиндрического переходника, а другая - в сквозном радиальном пазу корпуса и предназначена для взаимодействия с продольным пазом на наружной поверхности штока.
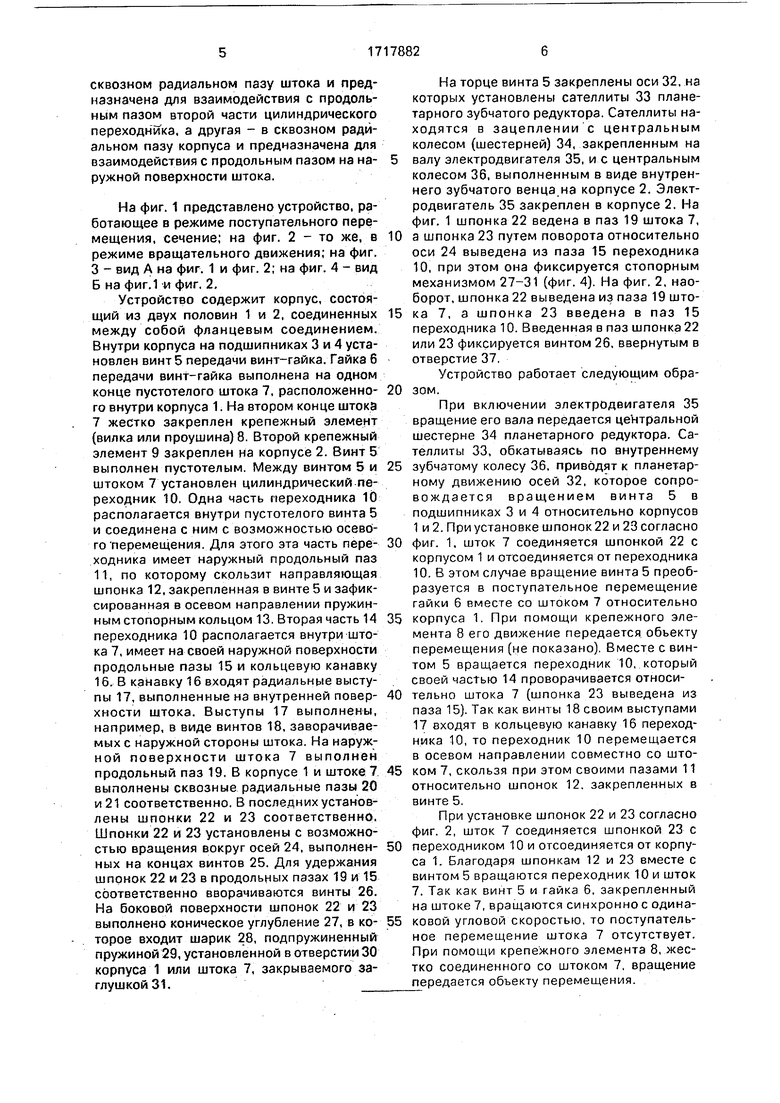
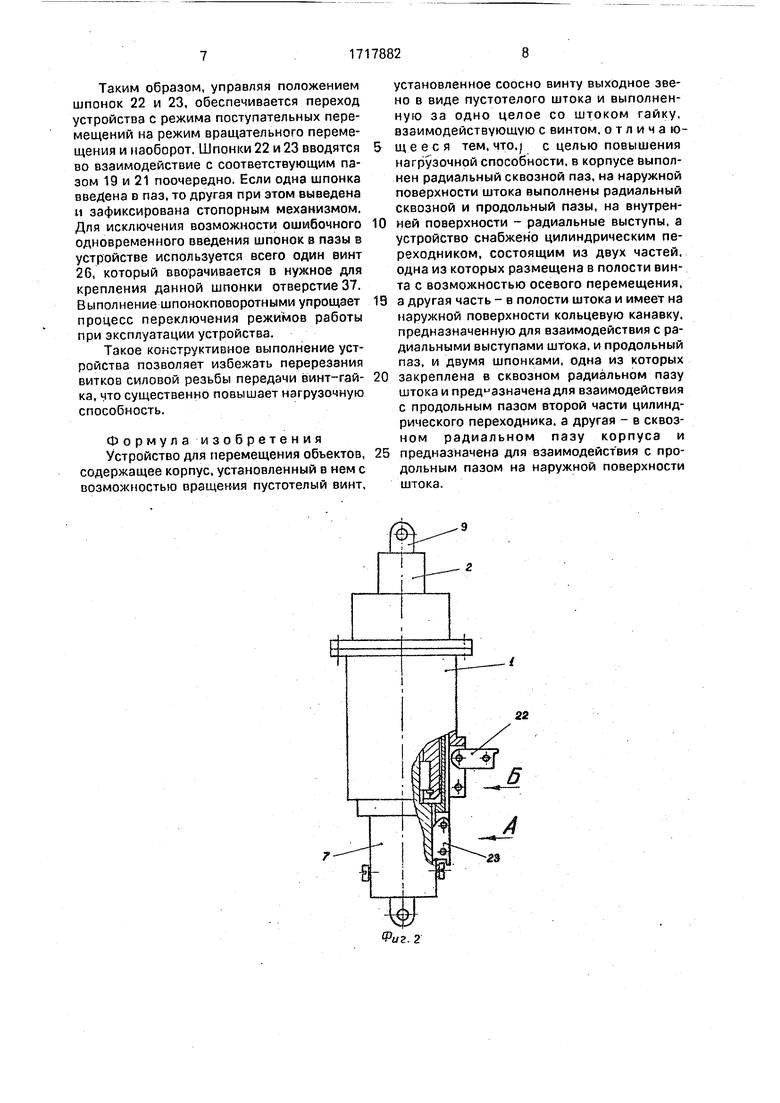
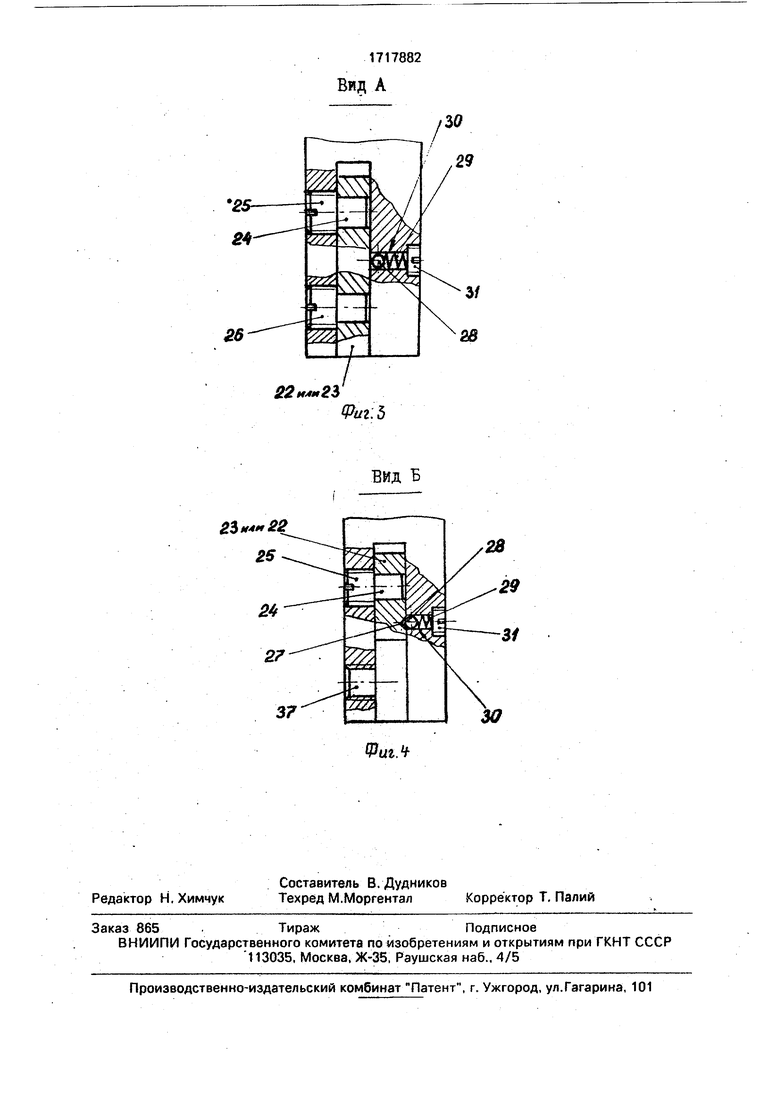
На фиг. 1 представлено устройство, работающее в режиме поступательного перемещения, сечение; на фиг. 2 - то же, в режиме вращательного движения; на фиг. 3 - вид А на фиг. 1 и фиг. 2; на фиг. 4 - вид Б на фиг.1 и фиг, 2,
Устройство содержит корпус, состоящий из двух половин 1 и 2, соединенных между собой фланцевым соединением. Внутри корпуса на подшипниках 3 и 4 установлен винт 5 передачи винт-гайка. Гайка 6 передачи винт-гайка выполнена на одном конце пустотелого штока 7, расположенного внутри корпуса 1. На втором конце штока 7 жестко закреплен крепежный элемент (вилка или проушина) 8. Второй крепежный элемент 9 закреплен на корпусе 2. Винт 5 выполнен пустотелым. Между винтом 5 и штоком 7 установлен цилиндрический переходник 10. Одна часть переходника 10 располагается внутри пустотелого винта 5 и соединена с ним с возможностью осевого перемещения. Для этого эта часть переходника имеет наружный продольный паз 11, по которому скользит направляющая шпонка 12, закрепленная в винте 5 и зафиксированная в осевом направлении пружинным стопорным кольцом 13. Вторая часть 14 переходника 10 располагается внутри штока 7, имеет на своей наружной поверхности продольные пазы 15 и кольцевую канавку 16. В канавку 16 входят радиальные выступы 17, выполненные на внутренней поверхности штока. Выступы 17 выполнены, например, в виде винтов 18, заворачиваемых с наружной стороны штока. На наружной поверхности штока 7 выполнен продольный паз 19. В корпусе 1 и штоке 7 выполнены сквозные радиальные пазы 20 и 21 соответственно. В последних установлены шпонки 22 и 23 соответственно. Шпонки 22 и 23 установлены с возможностью вращения вокруг осей 24, выполненных на концах винтов 25. Для удержания шпонок 22 и 23 в продольных пазах 19 и 15 соответственно вворачиваются винты 26. На боковой поверхности шпонок 22 и 23 выполнено коническое углубление 27, в которое входит шарик 28, подпружиненный пружиной 29, установленной в отверстии 30 корпуса 1 или штока 7, закрываемого заглушкой 31.
На торце винта 5 закреплены оси 32, на которых установлены сателлиты 33 планетарного зубчатого редуктора. Сателлиты находятся в зацеплении с центральным колесом (шестерней) 34, закрепленным на 5 валу электродвигателя 35, и с центральным колесом 36, выполненным в виде внутреннего зубчатого венца на корпусе 2. Электродвигатель 35 закреплен в корпусе 2. На фиг. 1 шпонка 22 ведена в паз 19 штока 7,
10 а шпонка 23 путем поворота относительно оси 24 выведена из паза 15 переходника 10, при этом она фиксируется стопорным механизмом 27-31 (фиг. 4). На фиг. 2, наоборот, шпонка 22 выведена из паза 19 што5 ка 7, а шпонка 23 введена в паз 15 переходника 10. Введенная в паз шпонка 22 или 23 фиксируется винтом 26, ввернутым в отверстие 37.
Устройство работает следующим обра0 зом.
При включении электродвигателя 35 вращение его вала передается центральной шестерне 34 планетарного редуктора. Сателлиты 33, обкатываясь по внутреннему
5 зубчатому колесу 36, приводят к планетарному движению осей 32, которое сопровождается вращением винта 5 в подшипниках 3 и 4 относительно корпусов 1 и 2. При установке шпонок 22 и 23 согласно
0 фиг. 1, шток 7 соединяется шпонкой 22 с корпусом 1 и отсоединяется от переходника 10. В этом случае вращение винта 5 преобразуется в поступательное перемещение гайки 6 вместе со штоком 7 относительно
5 корпуса 1. При помощи крепежного элемента 8 его движение передается обьекту перемещения (не показано). Вместе с винтом 5 вращается переходник 10, который своей частью 14 проворачивается относи0 тельно штока 7 (шпонка 23 выведена из паза 15). Так как винты 18 своим выступами 17 входят в кольцевую канавку 16 переходника 10, то переходник 10 перемещается в осевом направлении совместно со што5 ком 7, скользя при этом своими пазами 11 относительно шпонок 12, закрепленных в винте 5.
При установке шпонок 22 и 23 согласно фиг. 2, шток 7 соединяется шпонкой 23 с
0 переходником 10 и отсоединяется от корпуса 1. Благодаря шпонкам 12 и 23 вместе с винтом 5 вращаются переходник 10 и шток 7. Так как винт 5 и гайка 6, закрепленный на штоке 7, вращаются синхронно с одина5 ковой угловой скоростью, то поступательное перемещение штока 7 отсутствует. При помощи крепежного элемента 8, жестко соединенного со штоком 7, вращение передается объекту перемещения.
Таким образом, управляя положением шпонок 22 и 23, обеспечивается переход устройства с режима поступательных перемещений на режим вращательного перемещения и наоборот. Шпонки 22 и 23 вводятся во взаимодействие с соответствующим пазом 19 и 21 поочередно. Если одна шпонка введена в паз, то другая при этом выведена и зафиксирована стопорным механизмом. Для исключения возможности ошибочного одновременного введения шпонок в пазы в устройстве используется всего один винт 26, который вворачивается в нужное для крепления данной шпонки отверстие 37. Выполнение шпонокповоротными упрощает процесс переключения режимов работы при эксплуатации устройства.
Такое конструктивное выполнение устройства позволяет избежать перерезания витков силовой резьбы передачи винт-гай- ка, что существенно повышает нагрузочную способность.
Формула изобретения Устройство для перемещения объектов, содержащее корпус, установленный в нем с возможностью вращения пустотелый винт,
установленное соосно винту выходное звено в виде пустотелого штока и выполненную за одно целое со штоком гайку, взаимодействующую с винтом, о т л и ч а ю- щееся тем, что.j с целью повышения нагрузочной способности, в корпусе выполнен радиальный сквозной паз, на наружной поверхности штока выполнены радиальный сквозной и продольный пазы, на внутренней поверхности - радиальные выступы, а устройство снабжено цилиндрическим переходником, состоящим из двух частей, одна из которых размещена в полости винта с возможностью осевого перемещения, а другая часть - в полости штока и имеет на наружной поверхности кольцевую канавку, предназначенную для взаимодействия с радиальными выступами штока, и продольный паз, и двумя шпонками, одна из которых закреплена в сквозном радиальном пазу штока и предиазначена для взаимодействия с продольным пазом второй части цилиндрического переходника, а другая - в сквозном радиальном пазу корпуса и предназначена для взаимодействия с продольным пазом на наружной поверхности штока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения объектов | 1982 |
|
SU1067268A1 |
| Винтовой домкрат | 1974 |
|
SU522129A1 |
| Самотормозящееся нагружающее устройство | 1984 |
|
SU1234740A1 |
| ГЛУБИННЫЙ ДОМКРАТ | 1992 |
|
RU2029852C1 |
| ПРЯМОХОДНЫЙ ИСПОЛНИТЕЛЬНЫЙ ЭЛЕКТРОМЕХАНИЗМ | 2005 |
|
RU2297088C1 |
| Устройство для испытания пластов | 1990 |
|
SU1815326A1 |
| Нагружающее устройство | 1985 |
|
SU1295259A1 |
| Нагружающее устройство | 1987 |
|
SU1467417A2 |
| ВИНТОВАЯ СТЯЖКА-РАСПОРКА | 1990 |
|
RU2011633C1 |
| ГИДРОДИНАМИЧЕСКИЙ ПУЛЬСАТОР | 2010 |
|
RU2448236C1 |
Изобретение относится к машиностроению и касается устройств для осуществления поступательного или вращательного перемещения объектов, которые могут найти применение в испытательных машинах, в приводах станков, роботов, манипуляторов. Цель изобретения - повышение нагрузочной способности. Гайка 6 выполнена на одном конце пустотелого штока 7, имеющего на другом конце жестко закрепленный крепежный элемент 8 и соединяющегося с помощью шпонки 22 или 23 поочередно то с корпусом 1, то с вращающимся винтом 5 передачи винт-гайка через цилиндрический переходник 10. Переходник 10 установлен внутри пустотелого винта 5 с возможностью, осевого перемещения своими пазами 1.1 по шпонкам 12, закрепленным в винте 5. На выступающей из винта 5 части 14 переходника 10 выполнена кольце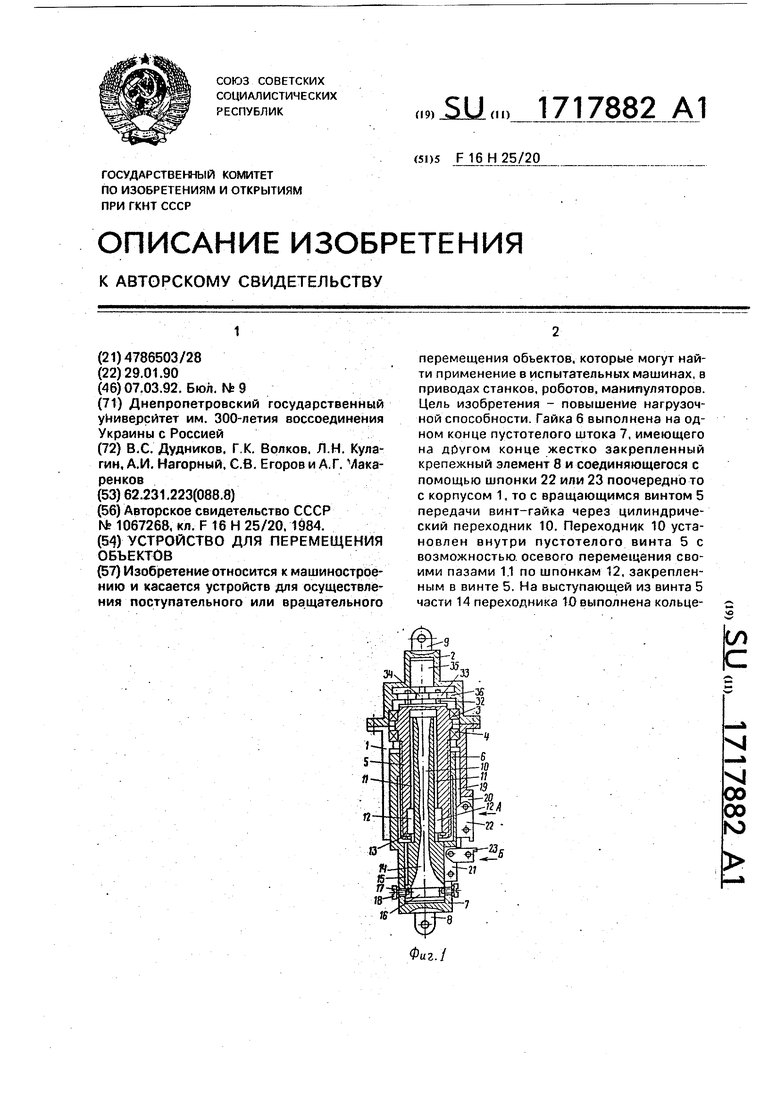
т23
ВИД А
25
Риг:5
SB
ВИД В
Фм.4
| Устройство для перемещения объектов | 1982 |
|
SU1067268A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
