устройство для моделирования линейного объекта, описываемое как стационарная линейная система с m 2 входами и п 2 выходами, состоящее из безынерционных звеньев, сумматоров и инерционных звень- 5 евТ2.
Устройство предназначено для моделирования матричной передаточной функции Н(р) многополюсной стационарной линей- 10 ной системы, описываемой системой дифференциальных уравнений состояния
)
f Ax+B
(D
y(t) Сх + D иГ,15
причем предполагается, что матрица Н(р) является квадратной, т.е. количество входов системы m равно количеству выходов п.
Передаточная функция Н(р) связана с системой уравнений (1) следующим обра- 20 зом:
Н(р) С(р1-АГ1В+0,(2)
где I - единичная матрица.
Согласно изложенному в 2 матричную передаточную функцию можно представить 25 в виде я
+ Ho,О)
) где 1 степень полиномаЧ- (р), являющегося наименьшим общим знаменателем всех элементов матрицы Н(р); AJ-J - и ненулевой некратный корень полинома (р); RJ - матрица вычетов, соответствующая корнюЯ j; Но - матрица, равная матрице D.
Каждая матрица Rj ранга г может быть разложена следующим образом
RJ 2$& ,(4)
j 1
где 51-матрица-столбец;р1-матрица-стро- ка.
Учитывая выражение (4), общее число слагаемых в выражении (3), содержащих знаменатель p-Aj ,
Г
rj.(5)
i 1
45
На основании указанных соотношений
при условии, что корни являются вещест- венными, приведены общая структура реализации средствами аналоговой вычислительной техники (АВТ) одного слагаемого д i p /(p-A j) в виде m безынерционных звеньев, реализующих элементы матрицыpi, одного сумматора, инерционного звена, реализующего функцию 1 /(p-A j), и п выходных безынерционных звеньев, реализующих элементы д ik, n,
0
5
0
5
5
0 5
матрицы 5i, а также схема устройства для реализации матрицы Н(р) в случае с вышеуказанными реализациями средствами АВТ слагаемых д (р- AJ) и выходными сумматорами. К входам к- го выходного сумматора присоединяются все выходы безынерционных звеньев, реализующих элементы д ik матрицы д . Безынерционные звенья, являющиеся масштабирующими элементами и реализующие матрицу/) i, сумматор и инерционное звено, для г слагаемых д р i/(p-A j) с одинаковыми AJ можно объединить в один многополюсный инерционный блоке m входами и г выходами (г соответствует rj в формуле (4)). Если в матрицер имеется только один ненулевой элемент, то сумматор перед инерционным звеном не включается. Тогда в общем случае устройство-прототип состоит из q-n масштабирующих элементов вто- ой группы, п выходных сумматоров и -входовых инерционных блоков, каждый из которых содержит m входных клемм, m-r масштабирующих элементов, г сумматоров, г инерционных звеньев, г выходных клемм, где , ,, (3. К каждой i-й входной клемме устройства подсоединяется Јi-x входов m-входовых инерционных блоков. Каждый из г выходов i-ro из Ј многополюсных инерционных блоков соединен с входами п выходных безынерционных звеньев, являющихся масштабирующими элементами, Выходы этих звеньев по одному присоединены к входам различных п выходных сумматоров. Выходы п выходных сумматоров присоединены по одному к соответствующим п выходным клеммам. В каждом т-входо- вом блоке входы каждого из г сумматоров соединены с выходами m безынерционных звеньев, а их входы присоединены к соответствующей из m входных клемм гл- входового инерционного блока. Выход каждого сумматора соединен с входом соответствующего инерционного звена, выход которого является выходом гл-входового инерционного блока.
Недостатком устройства является наличие избыточных безынерционных звеньев.
Цель изобретения - упрощение устройства.
Технико-экономическая эффективность устройства заключается в том, что применение специального разложения матриц PJ, QJ и Rj при формировании реализаций слагаемых матричной передаточной функции позволяет уменьшить количество масштабирующих элементов в устройстве, снижая этим его стоимость.
Цель достигается тем, что в устройстве для моделирования многололюсных линейных стационарных объектов, содержащем п выходных сумматоров, где п - число выходов объекта, первую группу из mn масшта- бирующих элементов, через которые каждый из m входов устройства соединен с соответствующим входом каждого выходного сумматора, группу m-входовых инерционных блоков, число выходов у каждого из которых равно рангу г матрицы передаточных функций объекта, а число инерционных блоков равно порядку fполинома в наименьшем общем знаменателе всех элементов матричной передаточной функции объекта, причем входы инерционных блоков соединены с соответствующими входами устройства, и вторую группу масштабирующих элементов, согласно изобретению кажг
дый инерционный блок содержит (2m-r+ 1) -
масштабирующих элементов, г сумматоров и г динамических звеньев, а число масштабирующих элементов второй группы, входы которых соединены с выходами одного из Ј
инерционных блоков, равно (2п-г+1)Ј , при
этом в каждом инерционном блоке каждый i-й сумматор, ,г, соединен своими m+1-i входами через соответствующие масштаби- рующие элементы блока с входами устройства с i-го по пл-й, а выход сумматора через соответствующее динамическое звено - с i-м выходом блока, который соединен через соответствующие масштабирующие эле- менты второй группы с соответствующими входами выходных сумматоров с (n-i-M)-ro по п-й.
Каждый масштабирующий элемент выполнен в виде безынерционного звена и переключателя, соединенного с выходом безынерционного звена своим подвижным контактом, а два неподвижных контакта образуют выход масштабирующего элемента.
Предлагаемое устройство с m входами и п выходами выполняет функцию моделирования описанной выражением (7) матрич- ной передаточной функции Н(р), содержащей слагаемое Н0 и наименьший общий знаменатель - полином W(p), как с вещественными корнями, так и парами комплексных корней. При суммировании пар комплексных корней согласно выражению (7) для каждой пары корней образуются два1 слагаемых, имеющих одинаковый общий знаменатель - квадратный полином, Pjp/(p2+bijp+b0j) и Qj/(pz+bijp + boj), где PJ и QJ - вещественные матрицы передаточных функций размером nxm.
Моделирование матрицы Но осуществляется с помощью масштабирующих элементов первой группы, каждый из которых состоит из безынерционного звена и переключателя, позволяющего в соответствии со знаком элемента матрицы Н0 подключить выход безынерционного звена к соответствующему входу сумматора. Моделирование слагаемых Rj/(p-Aj), соответствующих вещественным корням полинома W (р), и слагаемых PjP/(p2+bijp+b0j) и Qj/(p2+bijp+b0j), соответствующих парам комплексных корней, выполняется с помощью т-входовых инерционных блоков и масштабирующих элементов, таких же по конструкции, как и масштабирующие элементы, реализующие матрицу Н0. m-входовые инерционные блоки содержат динамические звенья, состоящие из сумматоров, интеграторов, безынерционных звеньев. Инерционные динамические звенья первого порядка входят в инерционные блоки, которые реализуют слагаемые, содержащие матрицу RJ. Динамическими звеньями т- входовых инерционных блоков, моделирующих слагаемые, содержащие матрицы QJ и PJ, являются соответственно колебательные звенья и звенья, состоящие из последовательногосоединениядифференцирующего и колебательного звеньев.
Существенным отличием от устройства- прототипа является то, что при реализации слагаемых выражения (7), содержащих матрицы RJ, QJ и PJ, структура устройства формируется на основании специального разложения таких матриц на сумму произведений вещественных матриц-столбцов и матриц-строк, причем вследствие этого разложения последние матрицы содержат максимально возможное количество нулевых элементов. Элементы матрицы-строки реализуются масштабирующими элементами и сумматором в m-входовом инерционном блоке. Элементы матрицы-столбца реализуются масштабирующими элементами второй группы. Если элемент матрицы-строки либо матрицы-столбца равен нулю, то соответствующий безынерционный элемент в устройство не включается. Использование указанного специального разложения позволяет уменьшить по сравнению с устрой- ством-прототипомколичество
масштабирующих элементов, чем достигается цель изобретения - упрощение устройства.
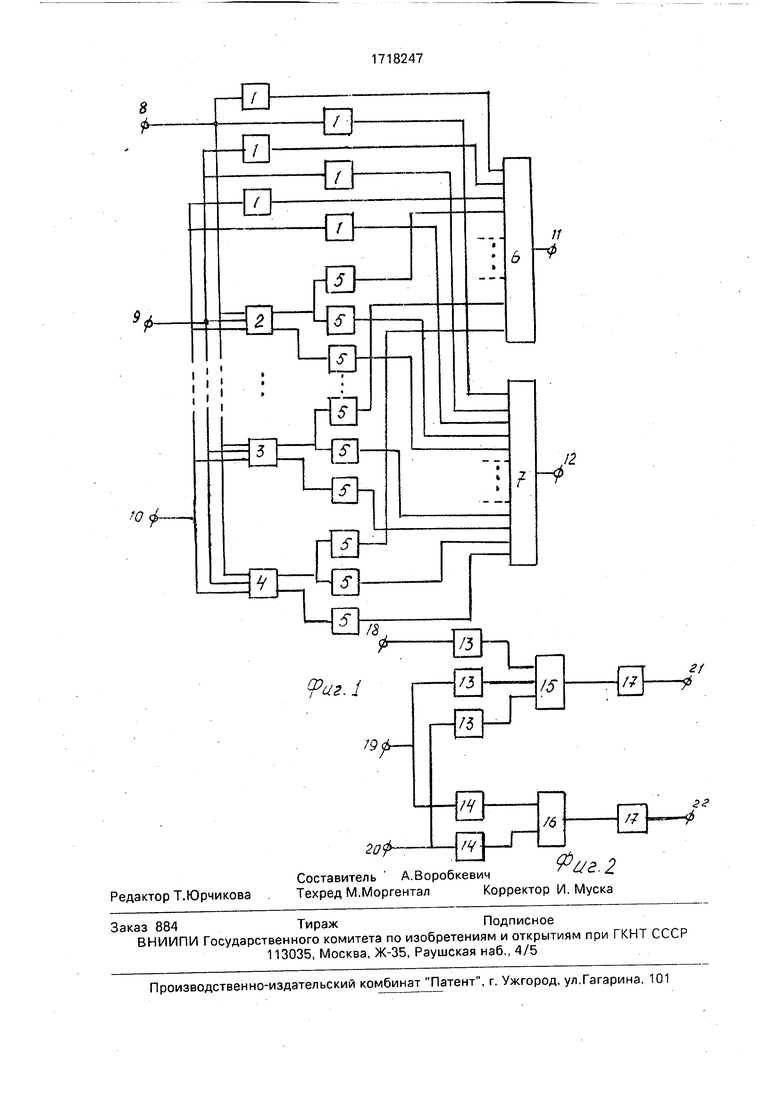
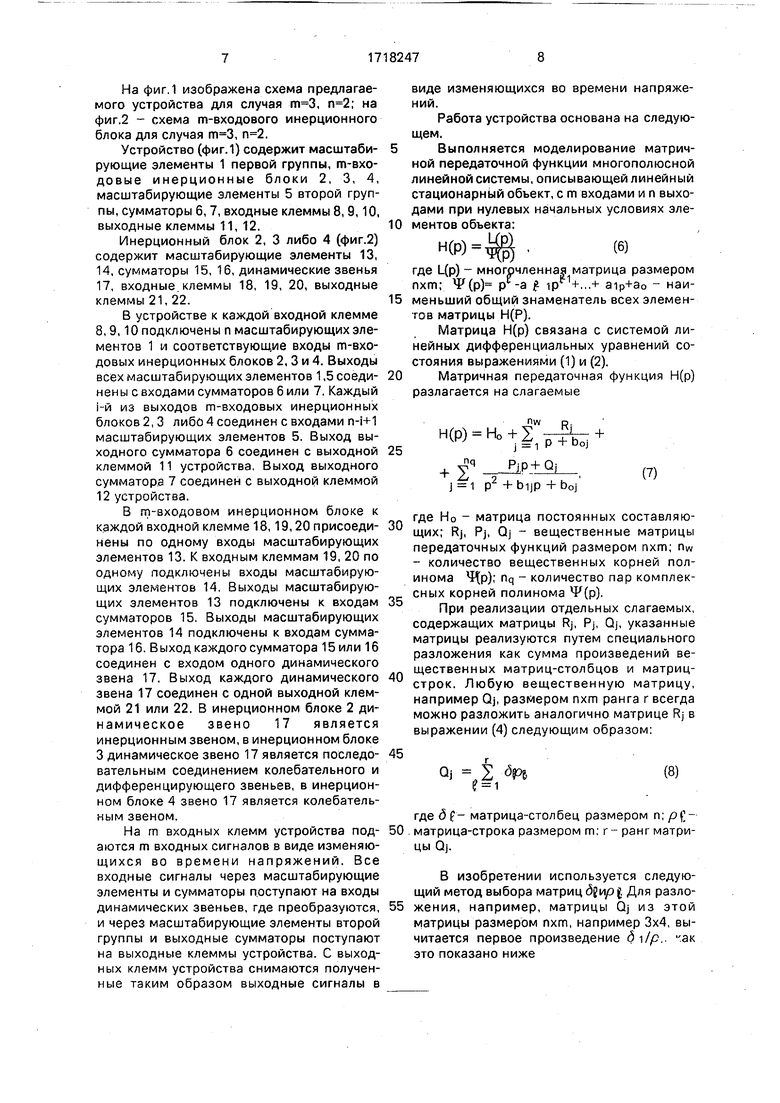
На фиг.1 изображена схема предлагаемого устройства для случая , на фиг.2 - схема т-входового инерционного блока для случая , .
Устройство (фиг.1) содержит масштаби- рующие элементы 1 первой группы, т-вхо- довые инерционные блоки 2, 3, 4, масштабирующие элементы 5 второй группы, сумматоры 6, 7, входные клеммы 8, 9,10, выходные клеммы 11, 12.
Инерционный блок 2, 3 либо 4 (фиг.2) содержит масштабирующие элементы 13, 14, сумматоры 15, 16, динамические звенья 17, входные, клеммы 18, 19, 20, выходные клеммы 21,22.
В устройстве к каждой входной клемме 8,9,10 подключены п масштабирующих элементов 1 и соответствующие входы т-вхо- довых инерционных блоков 2, 3 и 4. Выходы всех масштабирующих элементов 1,5 соеди- нены с входами сумматоров 6 или 7. Каждый i-й из выходов m-входовых инерционных блоков 2, 3 либо 4 соединен с входами n-i+1 масштабирующих элементов 5. Выход выходного сумматора 6 соединен с выходной клеммой 11 устройства, Выход выходного сумматора 7 соединен с выходной клеммой 12 устройства.
В m-входовом инерционном блоке к каждой входной клемме 18,19,20 присоеди- нены по одному входы масштабирующих элементов 13. К входным клеммам 19, 20 по одному подключены входы масштабирующих элементов 14. Выходы масштабирующих элементов 13 подключены к входам сумматоров 15. Выходы масштабирующих элементов 14 подключены к входам сумматора 16. Выход каждого сумматора 15 или 16 соединен с входом одного динамического звена 17. Выход каждого динамического звена 17 соединен с одной выходной клеммой 21 или 22. В инерционном блоке 2 динамическое звено 17 является инерционным звеном, в инерционном блоке 3 динамическое звено 17 является последо- вательным соединением колебательного и дифференцирующего звеньев, в инерционном блоке 4 звено 17 является колебательным звеном.
На m входных клемм устройства под- аются m входных сигналов в виде изменяющихся во времени напряжений. Все входные сигналы через масштабирующие элементы и сумматоры поступают на входы динамических звеньев, где преобразуются, и через масштабирующие элементы второй группы и выходные сумматоры поступают на выходные клеммы устройства. С выходных клемм устройства снимаются полученные таким образом выходные сигналы в
виде изменяющихся во времени напряжений.
Работа устройства основана на следующем.
Выполняется моделирование матричной передаточной функции многополюсной линейной системы, описывающей линейный стационарный объект, с m входами и п выходами при нулевых начальных условиях элементов объекта:
Н(р)(6)
где Цр) - многочленная матрица размером nxm; W(p) pe-a Ј ...+ aip+a0 - наименьший общий знаменатель всех элементов матрицы Н(Р).
Матрица Н(р) связана с системой линейных дифференциальных уравнений состояния выражениями (1) и (2).
Матричная передаточная функция Н(р) разлагается на слагаемые
nw о.
н(Р) н° + 2 +
р + b-ijp + b0j
(7)
где Но - матрица постоянных составляющих; Rj, Pj, QJ - вещественные матрицы передаточных функций размером nxm; nw - количество вещественных корней полинома 4{p); nq - количество пар комплексных корней полинома Ч (р).
При реализации отдельных слагаемых, содержащих матрицы Rj, Pj, QJ, указанные матрицы реализуются путем специального разложения как сумма произведений вещественных матриц-столбцов и матриц- строк. Любую вещественную матрицу, например QJ, размером nxm ранга г всегда можно разложить аналогично матрице RJ в выражении (4) следующим образом:
° ,,
(8)
матрица-столбец размером п;рЈ- матрица-строка размером m; r - ранг матрицы QJ.
В изобретении используется следующий метод выбора матриц 5{и/э J Для разложения, например, матрицы Qj из этой матрицы размером nxm, например 3x4, вычитается первое произведение д |p.. .ак это показано ниже
uqii qi2qi3Qi j Ю21 q22 Я23 q2 j|q3i q32q33 q34
iqni
14
bil
qisquL qnqiv
|0 0 0 0 0 q22 q23 q24 0 qs2 я зз q34
(9)
Далее
In qg4l 10 13Ј
(Ю)
Теперь очевидно,что (Зз ф 0 q33J ;
О
1 1W
Таким образом, например, слагаемое выражения (7) можно представить следующим выражением:
QJ v а -1-pt.
p2+bijp + b0j F1 p2+bljp+b0j Элементы матрицр реализуются масштабирующими элементами, соединенными с сумматором в инерционных блоках, элементы матриц б j- масштабирующими элементами второй группы, выражение 1/(р + +bijp+b0j) колебательным звеном. Переключатели в масштабирующих элементах позволяют устанавливать требуемый знак элементов матриц рр и 5( Если какой либо элемент матриц р I или бЈ равен нулю, то соответствующий безынерционный элемент из схемы исключается.
Для реализации одной матрицы QJ (либо PJ, либо RJ) согласно методу разложения, описанному формулами (9)-(11), требуется (2m-r+1)-0,5-r масштабирующих элементов в инерционном блоке и (2ги -r-H) 0,5 r масштабирующих элементов второй группы. При этом общее количество масштабирующих элементов, требующееся для реализации одной такой матрицы, уменьшается на г(г-1) по сравнению с разложением матрицы QJ, не исполь0
5
0
зующим разложения согласно формулам (9Н11).
Формула изобретения
1.Устройство для моделирования многополюсных линейных стационарных объектов, содержащее п выходных сумматоров, где п - число выходов объекта, первую группу из mn масштабирующих элементов, через которые каждый из m входов устройства соединен с соответствующим входом каждого выходного сумматора, группу т-входо- вых инерционных блоков, число выходов у каждого из которых равно рангу г матрицы передаточных функций объекта, а число инерционных блоков равно порядку полинома в наименьшем общем знаменателе всех элементов матричной передаточной функции объекта, причем входы инерционных блоков соединены с соответствующими входами устройства, и вторую группу масштабирующих элементов, отличающееся тем, что, с целью упрощения, каждый инерционный блок содержит (2m-r+1)- масштабирующих элементов, г сумматоров и г динамических звеньев, а число масштабирующих элементов второй группы. входы которых соединены с выходами одного из инерционных блоков, равно(2п-г+ ),
при этом в каждом 1нерционном блоке каждый 1-й сумматор, i 1 ,г, соединен своими т+15-I входами через соответствующие масштабирующие элементы блока с входами устройства с i-ro по m-й, а выход сумматора через соответствующее динамическое звено - с i-м выходом блока, который соединен че0 рез соответствующие масштабирующие элементы второй группы с соответствующими входами выходных сумматоров с (n-i+1)-ro по п-й.
2.Устройство по п.1, о т л и ч а ющ е е с я 5 тем, что каждый масштабирующий элемент
выполнен в виде безынерционного звена и переключателя, соединенного с выходом безынерционного звена своим подвижным контактом, а два неподвижных контакта 0 образуют выход масштабирующего элемента.
5
0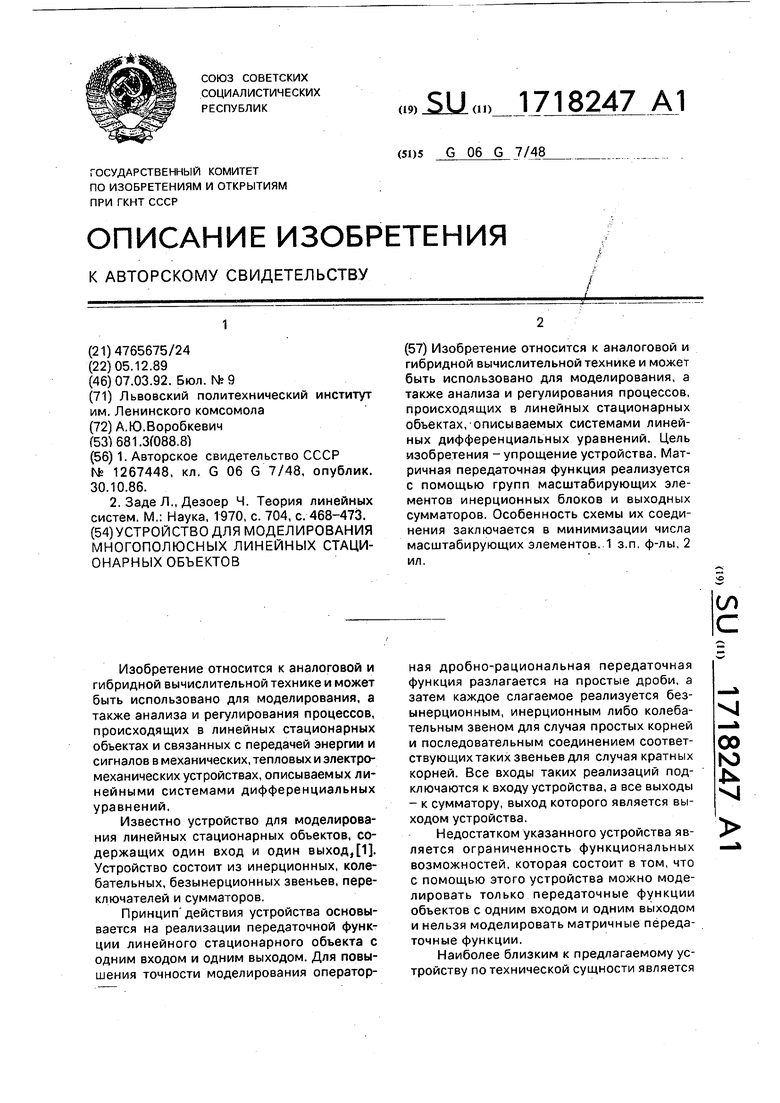

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования линейных стационарных объектов | 1985 |
|
SU1267448A2 |
| Устройство для моделирования линейных стационарных объектов | 1980 |
|
SU962998A1 |
| СПОСОБ ФУНКЦИОНАЛЬНОГО ДИАГНОСТИРОВАНИЯ ЛИНЕЙНЫХ СИСТЕМ УПРАВЛЕНИЯ | 1993 |
|
RU2099766C1 |
| Устройство компенсации нелинейности | 1986 |
|
SU1381420A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1998 |
|
RU2130635C1 |
| Корректирующее устройство | 1987 |
|
SU1478188A1 |
| Устройство для умножения в системе остаточных классов | 1984 |
|
SU1166098A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2007 |
|
RU2341805C1 |
| Устройство для полунатурного моделирования нелинейных колебательных систем | 1980 |
|
SU947877A1 |
| Дифференцирующее устройство с переменной структурой | 1974 |
|
SU461421A1 |