00 00
4 Ю
Изск :тение относится к техническим средствам нелинейной коррекции систем управления и может быть использовано в следящих системах, системах стабилизации и программного управления, в приборах вычислительной техники и автоматики, содержащих инерционный нелинейный блок с нелинейностью типа люфт.
Цель изобретения - повышение точности устройства.
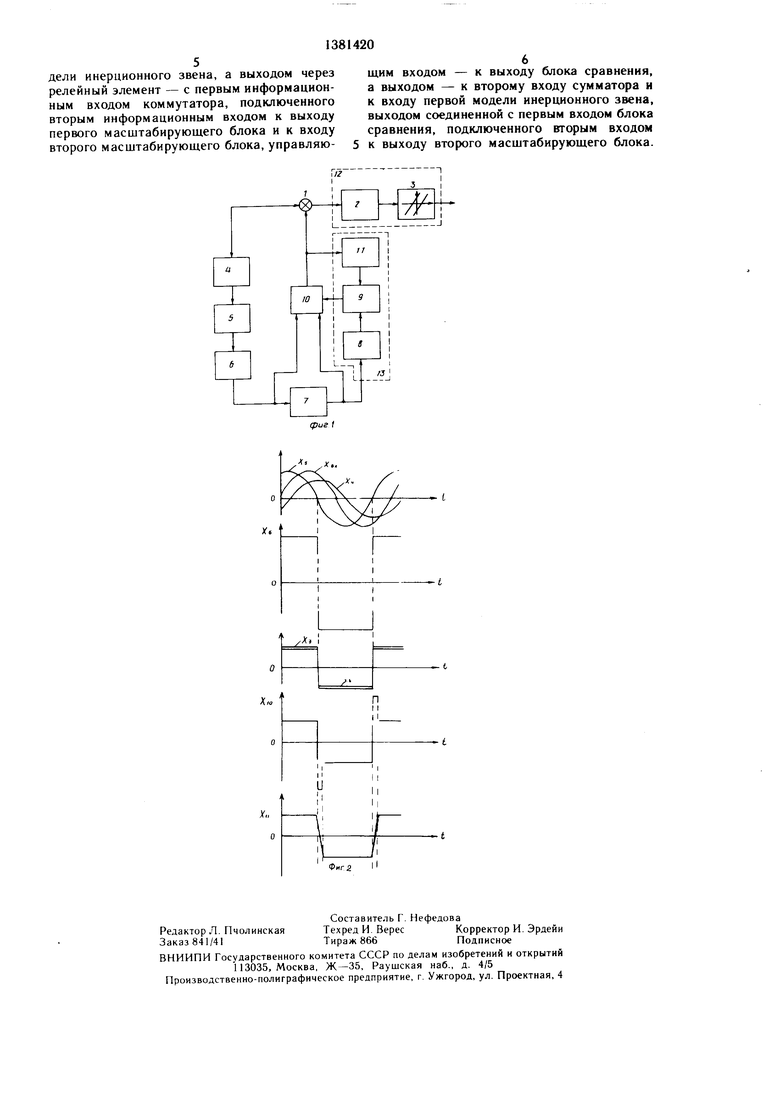
В момент изменения знака производной входного сигнала для компенсации люфта необходимо на вход инерционного звена 2 дополнительно подать такой сигнал, который бы за минимально возможное время сформировал на выходе инерционного звена 2 сигнал, равный половине величины люфта. Для этого нужно сначала подать на вход инерционного звена 2 максимально возможный сигнал исходя из эксплуатационных хаНа фиг 1 приведена структурная схема Ю рактеристик нелинейного блока 12, затем в устройства; на фиг. 2 - эпюры напряжений, момент достижения сигналом на выходе инер- поясняющие принцип работы устройства.ционного звена 2 половины ве-1ичины люфта
изменить величину входного сигнала настольУстройство содержит сумматор 1, инер- ко, чтобы выходной сигнал инерционного цнонное линейное звено 2, безынерционное . звена 2, формируемый в зависимости от
нелинейное звено 3, вторая модель инерционного звена 4, дифференциатор 5, релейный блок 6, первый и второй масщтабирующие блоки 7 и 8, блок 9 сравнения, коммутатор 10, первая модель инерционного звена 11, инерционный нелинейный блок 12 и блок 13 20 управления.
В качестве инерционного нелинейного блока 12, влияние нелинейности которого необходимо компенсировать с помощью данвыходного сигнала устройства компенсации нелинейности, оставался неизменным и равным половине величины люфта.
В идеале первая и вторая модели инерционного звена 4 и 11 должны точно отражать динамические свойства инерционного звена 2, т. е. иметь с ним одинаковые передаточные функции. Однако для повыщения точности в данном случае достаточно, чтобы
В идеале первая и вторая модели инерционного звена 4 и 11 должны точно отражать динамические свойства инерционного звена 2, т. е. иметь с ним одинаковые передаточные функции. Однако для повыщения точности в данном случае достаточно, чтобы
ного устройства компенсации нелинейности,35 „ервая модель инерционного звена 4 имела
для определенности рассмотрим двигательодинаковую с инерционным звеном 2 фазопостоянного тока с редуктором, который „ характеристику, а вторая модель
структурно можно представить в виде после-„„ерциониого звена 11 за одинаковое время
довательного соединения инерционного ли- „|;ерц„оиным звеном 2 отрабатывала сигнеиного звена 2 и безынерционного нелинеи, релейного блока 6 и первого
ного звена 3. Инерционное линейное звено Z JU .. -т г.
структурно представляет собой последовательно соединенные два линейных динамических звена с передаточными функциями
W, (р) и W, (р), где W. (р) апериодическое звено 1-го порядка или w, (р)
, апериодическое звено 2-го
(T,pfO(Xpt2)
порядка, или
масштабного блока 7. Величина люфта нелинейного блока 3 должна быть экспериментально определена в каждом конкретном случае. Чтобы свести к минимуму внияние измеиения величины люфта в процессе ра,с боты устройства первый масштабирующий блок 7 должен быть выполнен регулируемым. Релейный блок 6 (например, релейный усилитель) должен формировать максимально возможный для данного нелинейного блока 12 (например, для двигателя постоянного
тока) сигнйл, при этом уровень этого сигнала отражается только на времени достижения сигнала на выходе инерционного звена 2 велнчины, равной половине величины люфта нелинейного звена 3, следовательр - преобразование Лапласа. , но, высоких требований к точности выходного сигнала релейного блока 6 не предъявляется. Параметры релейного блока б выбираются такими, чтобы обеспечить в момент изменения знака производной входного сигнала устройства максимальную скорость изW, (,Yp T p 2jTp
бательное звено; Wj(p) .k,, k - коэффициент усиления; Т, Т , Tj - постоянные времени; f - коэффициент колебательности;
Входным сигналом этого соединения является напряжение, а выходным - угол поворота вала двигателя. Вид передаточной функции WI(P) зависит от характеристик двигателя, в частности от соотношения элекВ момент изменения знака производной входного сигнала для компенсации люфта необходимо на вход инерционного звена 2 дополнительно подать такой сигнал, который бы за минимально возможное время сформировал на выходе инерционного звена 2 сигнал, равный половине величины люфта. Для этого нужно сначала подать на вход инерционного звена 2 максимально возможный сигнал исходя из эксплуатационных ха ко, чтобы выходной сигнал инерционного звена 2, формируемый в зависимости от
выходного сигнала устройства компенсации нелинейности, оставался неизменным и равным половине величины люфта.
В идеале первая и вторая модели инерционного звена 4 и 11 должны точно отражать динамические свойства инерционного звена 2, т. е. иметь с ним одинаковые передаточные функции. Однако для повыщения точности в данном случае достаточно, чтобы
„ервая модель инерционного звена 4 имела
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для компенсации нелинейности объекта типа "люфт | 1983 |
|
SU1108387A1 |
| Устройство компенсации нелинейности | 1982 |
|
SU1037204A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Устройство компенсации нелинейности | 1986 |
|
SU1444705A1 |
| Следящая система с люфтом | 1981 |
|
SU1012194A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ НЕЙРОНА | 1991 |
|
RU2024059C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| Устройство для компенсации инерционной нелинейности типа насыщения | 1980 |
|
SU940129A1 |
| Следящая система | 1977 |
|
SU732807A1 |
| Дифференцирующее устройство с переменной структурой | 1974 |
|
SU461421A1 |
Изобретение относится к техническим средствам коррекции систем управления и может быть использовано в следящих системах, системах стабилизации и программного управления, в приборах вычислительной техники и автоматики, содержащих инерционный нелинейный блок с нелинейностью типа люфт. Целью настоящего изобретения является повыщение точности устройства. Поставленная цель достигается за счет того, что входной сигнал устройства проходит через линейную модель нелинейного динами ческого звена, дифференцируется и сравни вается по уровню с пороговым значением и подается на первый информационный коммутатор. Кроме того, после сравнения с пороговым устройством сигнал масщтабирует- ся первый раз и подается на второй вход информационного коммутатора, затем масштабируется второй раз и сравнивается с выходным сигналом коммутатора. Результат этого сравнения осуществляет управление коммутатором. Выходной сигнал коммутатора суммируется с входным сигналом устройства, а результат суммирования является выходным сигналом устройства. Этот сигнал поступает на вход динамического нелинейного блока с характеристикой типа люфт, влияние которой на систему необходимо компенсировать. 2 ил. с (Л
тромагнитной постоянной времени якорной 50 менения сигнала на выходе инерционного
звена 2. Параметры первого масштабирующего блока 7 должны быть такими, чтобы обеспечить сигнал на выходе инерционного звена 2 и второй модели инерционного звена 11, равный половине величины люфта, если компенсационный сигнал снимается с выхода этого масштабирующего блока. Второй масштабирующий блок 8 играет вспомогательную роль, сигнал на его выходе долцепи и электромеханической постоянной времени в общем сигнале. Функции w (р) и w.j(p) могут иметь и другой вид.
Для обеспечения работоспособности данного устройства точный вид передаточной функции инерционного звена 2 знать необя- зательно, нужно знать только его частотные характеристики, которые всегда можно получить экспериментальным путем.
менения сигнала на выходе инерционного
звена 2. Параметры первого масштабирующего блока 7 должны быть такими, чтобы обеспечить сигнал на выходе инерционного звена 2 и второй модели инерционного звена 11, равный половине величины люфта, если компенсационный сигнал снимается с выхода этого масштабирующего блока. Второй масштабирующий блок 8 играет вспомогательную роль, сигнал на его выходе должен быть несколько меньше сигнала на выходе масштабирующего блока 7.
Коммутирующие элементы в коммутаторе 10 соединены таким образом, чтобы в момент, когда величина сигнала на выходе второй модели инерционного звена 11 превысит величину сигнала на выходе второго масштабирующего блока 8, произошло переключение коммутатора 10 в такое положение, при котором на второй вход сумматора 1 и на
инерционного звена II подается сигнал с выхода первого масштабирующего блока 7. Этот сигнал равен по величине половине ширины люфта нелинейного звена 3. Возрастание сигналов на выходе первой модели инерционного звена 11 и на выходе инерционного звена 2 нелинейного 12 прекращается. Второй масштабирующий.блок 8, незначительно уменьшая сигнал по сравнению с половиной ширины люфта нелинейновторой вход модели инерционного звена II го звена 3, не позволяет компенсационному подается сигнал с выхода первого масштаби- сигналу проскочить уровень, равный поло- рующего блока 7. Такое состояние коммутатора 10 должно сохраняться до тех пор, пока не изменится знак сигнала на выходе дифвине ширины люфта из-за инерционного переключения и, кроме того, обеспечивает после переключения небольшое превышение сиг
ференциатора 5, так как сигнал на выходе нала на выходе первой модели инерционновторой модели инерционного звена 11 больше сигнала на выходе второго делителя напряжения масштабирующего блока.
Устройство работает следующим образом.
Вторая модель инерционного звена 4, отрабатывая входной сигнал устройства, вносит такое же фазовое отставание, как и инерционное звено 2.
Пусть при включении устройства в рабого звена 11 по сравнению с сигналом на выходе второго масштабирующего блока 8. Это, в свою очередь, не допускает дребезга коммутатора 10.
Такое значение компенсационного сигнала сохраняется до тех пор, пока не изменится знак сигнала на выходе дифференциатора 5. При его изменении начинает уменьшаться сигнал на выходах первой модели
ту сигнал на выходе второй модели инер- 25 инерционного звена 1I и инерционного звеционного звена 4 возрастает с нуля в поло жительном направлении. Производная этого сигнала также положительная, следовательно, дифференциатор 5 и релейный блок 6 формируют постоянный положительный сигна 2 нелинейного блока 12, что приводит к очередному переключению коммутатора 10, который подключает второй вход сумматора 1 и вход первой модели инерционного звена 11 к выходу релейного блока 6, сигнал на
нал который подается на первый информа- выходе которого становится отрицательным.
Снова начинается переходный процесс, который заканчивается за минимально возможное время и дальнейшая работа устройства повторяется.
... ,„Введение указанных блоков и связей обесной сигнал которого поступает на второй - печивает по сравненню с прототипом повы- вход блока 9 сравнения. Первоначально сиг- шение точности компенсации при использо- иал, подаваемый с выхода первой модели инерционного звена 11 на первый вход блоциониый вход коммутатора 10. Выходной сигнал релейного блока 6 через первый масштабирующий блок 7 подается на второй информационный вход коммутатора 10 и вход второго масштабирующего блока 8, выходка 9 сравнения, равен нулю. Блок 9 сравневанин инерционных звеньев любого порядка, предшествующих нелинейному закону.
С помощью предлагаемого устройства
ния оперирует абсолютиыми значениями 40 максимально нейтрализуются инерционные
входных сигналов. Так как абсолютное значение сигнала на выходе второго масщтаби- рующего блока 8 больше, чем на выходе первой модели инерционного блока 11, то блок 9 сравнения, управляя коммутатором 10, подключает второй вход сумматора 1 к выходу релейного блока 6. При этом компенсационный сигнал значнтельно превосходит величину половины ширины люфта нелинейностн. Этот сигнал начинает отрабатываться как
свойства звена 2 с тем, чтобы выдать компенсационный сигнал на вход нелинейности типа люфт, равный половине величины этого люфта.
Формула изобретения
Устройство компенсации нелинейности, содержащее первую модель инерционного звена, сумматор, первый вход которого яв первой моделью инерционного звена 11, так л ляется входом устройства и соединен с вхо- и инерционным звеном 2 нелинейного бло- дом второй модели инерционного звена, а ка 12. Скорость отработки максимальная. выход является выходом устройства, и нос В момеит, когда величина сигнала на выходе ледовательно соединенные релейный блок и первой модели инерционного звена 11 пре- первый масштабирующий блок, отличающее- высит величину сигнала на выходе второ- ся тем, что, с целью повышения точности го масштабирующего блока 8, происходит 55 устройства, в нем дополнительно установле- переключение коммутатора 10 в противопо- ны коммутатор, блок сравнения, второй ложиое состояиие, при котором на второй масштабирующий блок и дифференциатор, вход сумматора 1 и на вход первой модели входом соединенный с выходом второй моинерционного звена II подается сигнал с выхода первого масштабирующего блока 7. Этот сигнал равен по величине половине ширины люфта нелинейного звена 3. Возрастание сигналов на выходе первой модели инерционного звена 11 и на выходе инерционного звена 2 нелинейного 12 прекращается. Второй масштабирующий.блок 8, незначительно уменьшая сигнал по сравнению с половиной ширины люфта нелинейного звена 3, не позволяет компенсационному сигналу проскочить уровень, равный поло-
го звена 3, не позволяет компенсационному сигналу проскочить уровень, равный поло-
вине ширины люфта из-за инерционного переключения и, кроме того, обеспечивает после переключения небольшое превышение сиг
нала на выходе первой модели инерционного звена 11 по сравнению с сигналом на выходе второго масштабирующего блока 8. Это в свою очередь, не допускает дребезга коммутатора 10.
Такое значение компенсационного сигнала сохраняется до тех пор, пока не изменится знак сигнала на выходе дифференциатора 5. При его изменении начинает уменьшаться сигнал на выходах первой модели
инерционного звена 1I и инерционного звена 2 нелинейного блока 12, что приводит к очередному переключению коммутатора 10, который подключает второй вход сумматора 1 и вход первой модели инерционного звена 11 к выходу релейного блока 6, сигнал на
выходе которого становится отрицательным.
печивает по сравненню с прототипом повы- шение точности компенсации при использо-
ванин инерционных звеньев любого порядка, предшествующих нелинейному закону.
С помощью предлагаемого устройства
максимально нейтрализуются инерционные
свойства звена 2 с тем, чтобы выдать компенсационный сигнал на вход нелинейности типа люфт, равный половине величины этого люфта.
Формула изобретения
.X
дели инерционного звена, а выходом через релейный элемент - с первым информационным входом коммутатора, подключенного вторым информационным входом к выходу первого масштабирующего блока и к входу второго масштабирующего блока, управляю®
...
щим входом - к выходу блока сравнения, а выходом - к второму входу сумматора и к входу первой модели инерционного звена, выходом соединенной с первым входом блока сравнения, подключенного вторым входом 5 к выходу второго масштабирующего блока.
| СЛЕДЯЩАЯ СИСТЕМА С НЕЛИНЕЙНОЙ КОРРЕКЦИЕЙ | 0 |
|
SU318907A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система | 1980 |
|
SU962841A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство компенсации нелинейности | 1982 |
|
SU1037204A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
