Изобретение относится к средствам коррекции систем автоматического управления и может быть использовано для коррекции замкнутых систем управления объектами с транспортным запаздыванием в машиностроении, теплоэнергетике, химической промышленности И Т0До
Цель изобретения - увеличение времени упреждения устройства и повышение его точности.
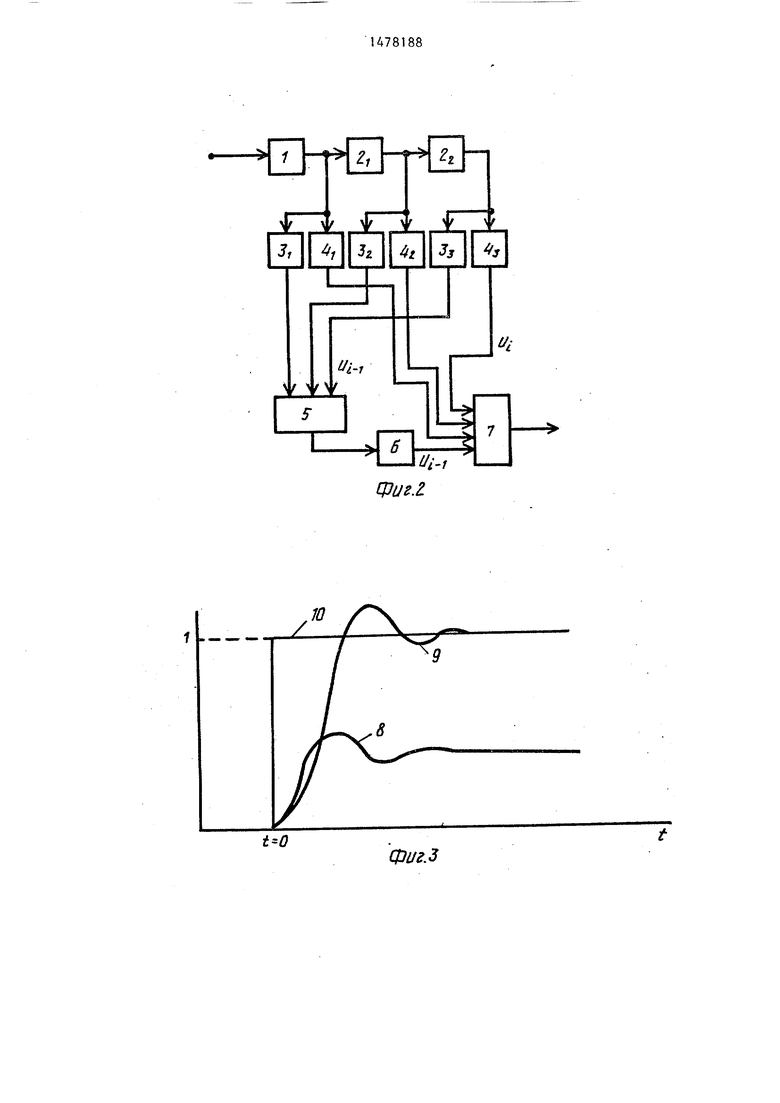
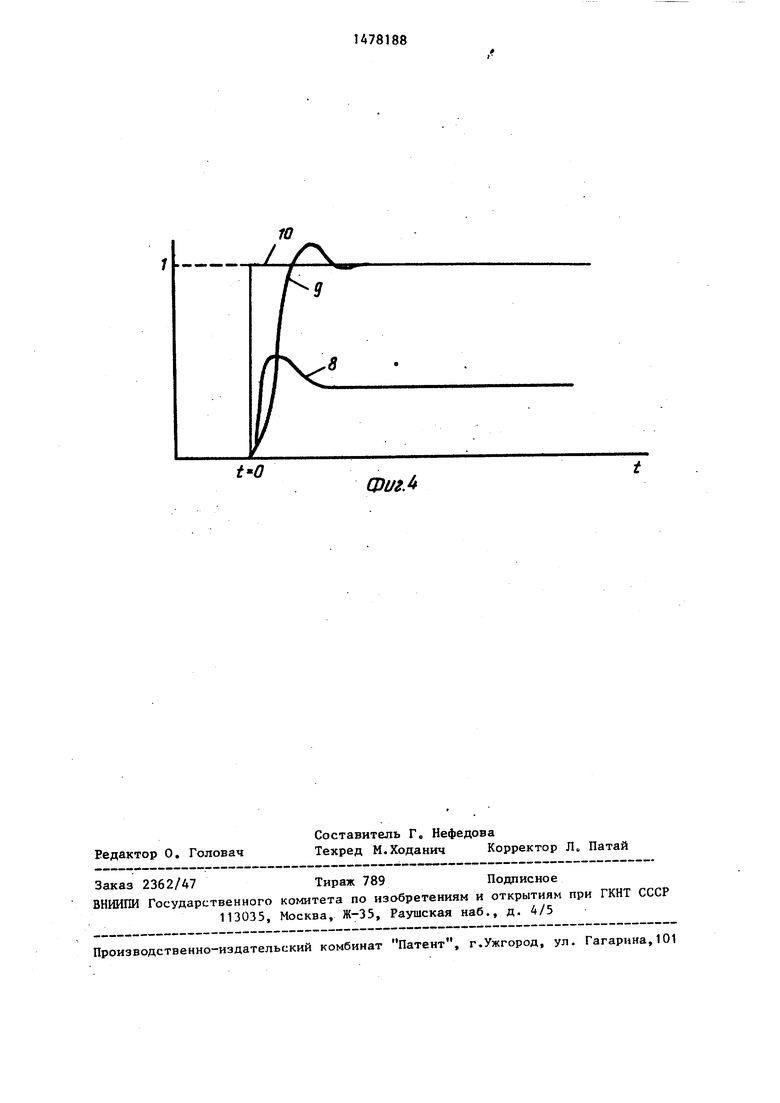
На фиг. 1 приведена структурная схема устройства; на фиг, 2 - структурная схема устройства с астатизмом i
первого порядка, обеспечивающего нулевую ошибку упреждения включительно по третью производную сигнала рассогласования; на фиг. 3 и 4 - эпюры сигналов, характеризующих работу
замкнутых систем с предлагаемым и известным корректирующим устройством.
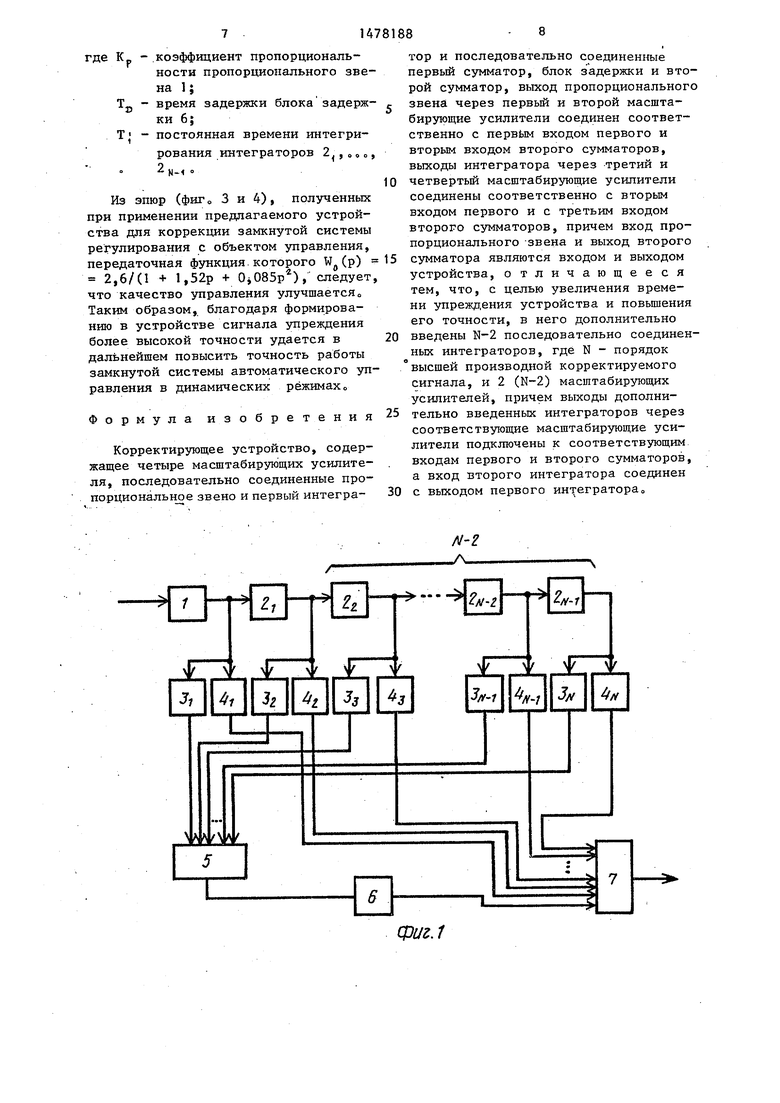
Схема содержит пропорциональное звено 1, интеграторы 24, 2г,,,, масштабирующие усилители 3, Зг,,.,.3м, 4,, 42,.,0,4N, где N - порядок высшей производной корректирующего сигнала, учитываемой при построении корректирующего устройства, первый сумматор 5, блок 6 задержки и второй сумматор 7„
В основе принципа построения предлагаемого устройства лежит проводимая с помощью моментов, индуцироW(P) Ро +|Ь,е Рзэ + Z« bMP. (
(4)
ванных на конечном интервале Чебышев- ской системой степенных функций, ап- 15 где F (р) m (р)/Ј(р). проксимация требуемой, физически не- Таким образом, на основе зависи- реализуемой, передаточной функций астатического регулятора с упреждением, имеющей вид
20
Wa(p) - (p) + e,
мостей (1) и (4) передаточную функцию регулятора с упреждением, реализующую предлагаемый способ, можно описать выражением
WP/P) + VP)- (5) При этом, поскольку в качестве элементарных звеньев фильтра W,(p) используется (N - 1) последовательно соединенных интегратора, то в случае если L6 (N - 1), эти интеграторы можно одновременно использовать с целью реализации передаточной функ- 30 Дни WL(p) типа
25
К
D
Р
(р) - передаточная функция iобычного регулятора с астатизмом L-ro порядка, в котором отсутствует упреждение сигнала рассогласования ;
-коэффициент пропорциональности;
-передаточная функция блока опережения, обеспечивающего управление с упреждениемо
аппроксимация сводится, по к аппроксимации сигнала упреж- 35 6(р)ер в , где 6(р) - изобрапо Лапласу сигнала рассогласо6(t), сигналом, получаемым на выражения
Т1Ц0Ј(р) + р,, 6 (р) +
30
0
45
P)
(2)
- передаточная функция блока 6 задержки;
- заданные коэффициенты;
/ N с/ %Г 1 Г/1 -рТв1 п(-11П
П(Р) 6(P)j-f;|a-e
(UJ п. 1
fc т )
(3)
- операторное изображение по Лапласу n-го скользящего момента сигнала рассогласования, определяемого как
h(t)
т «т,- 6(Ж -t+TB)nd. с 1-т0
В результате, как следует из выражений (2) и (3), передаточную функцию блока опережения можно реализовать с заданной точностью в линейном фильтре, передаточная функция которого имеет вид
т N-2
W(P) Ро +|Ь,е Рзэ + Z« bMP. (
(4)
де F (р) m (р)/Ј(р). Таким образом, на основе зависи-
где F (р) m (р)/Ј(р). Таким образом, на основе зависи-
мостей (1) и (4) передаточную функцию регулятора с упреждением, реализующую предлагаемый способ, можно описать выражением
WP/P) + VP)- (5) При этом, поскольку в качестве элементарных звеньев фильтра W,(p) используется (N - 1) последовательно соединенных интегратора, то в случае, если L6 (N - 1), эти интеграторы можно одновременно использовать с целью реализации передаточной функ- Дни WL(p) типа
W,(p) (ар +...+а4р + а0)/р ,
(6)
где а,,.ва,а4, aQ - заданные коэффициенты
В другом случае, если L (N-1) (что встречается довольно редко), к фильтру необходимо присоединить L - (N-1) интегралов Однако, как следует из изложенной теории, это позволяет всегда увеличить число N, что приводит к первому случаю
Выражение (5) при соответствующем выборе коэффициентов |50 , 5, , ot0 , определяющих (совместно с коэф- фициентами а0, а.) коэффициенты масштабирования усилителей 3 и 4 (фиго 1), приближается к требуемой передаточной функции 1 с точностью
/UW(P)| -/W,j(p) - Wpa(p)/ /Kp
if-fEili-d - -i Э:МЕ)| )7/
Ж i-1 C V Эр - /p.eJJ/ (7)
Эту точность, в силу равномерной сходимости ряда (7), можно оценить на основе неравенства
PN+I TЈ
(N+1)
т(1ТвШ-1
1-LMElf
/(ЬП
ЭН+l P
Л
(8)
Причем, как следует из зависимостей (7) и (8) полное (точное) управление с упреждением обеспечивается для сигналов рассогласования, обладающих производными до N-ro порядка,
Устройство (фиг о 1) работает следующим образомо
Сигнал рассогласования, равный разности между заданным и регулируемым сигналами, увеличивают в Кр- раз в пропорциональном звене 1, выходной сигнал которого интегрируют (N-1) раз в цепочке, состоящей из последовательно соединенных (N-1) интеграторов 2,0 о „, 2 (N-I} , каждый с постоянной интегрирования Т;. Затем сигнал с выхода пропорционального звена 1 и все сигналы с выходов интеграторов 2,,0оо,2Ыи умножают в масштабирующих усилителях 3,, э 0«, ,3W и 4, ,.«, 0 о, 4 и на заданные коэффициенты масштаби рования, значения которых определяют на основе значений коэффициентов fy ,..., oi, (4) и а0, а, , ..„, а ц (6)о Выходные сигналы масштабирующих усилителей 3 ,, „ 0 0,3щ суммируют в первом сумматоре 5 и задерживают в блоке 6 задержки на время Т, равное требуемому времени упреждения, и, наконец, задержанный сигнал суммируют во втором сумматоре 7 со всеми незадержанными выходными сигналами масштабирующих усилителей
( о
. ,4No Выходной сигнал второго
сумматора используют в качестве управляющего
Рассмотрим более подробно работу корректирующего устройства с упреждением на время Т, на примере работы конкретного устройства (фиг„ 2) с астатизмом первого порядка, обеспе- чивающего нулевую ошибку упреждения включительно по третью производную сигнала рассогласования, т„е0 при N 3.
В таблице приведены рассчитанные для N 2, 3, 4 значения коэффициентов Ро , |3, , оС0 , о о о, ./2, при которых фильтр с передаточной функцией (p) обеспечивает управление с упреждением для сигналов рассогласования, обладающих производными высших порядков, соответственно до 2-го (прототип) , 3-го и 4-го порядка включительно .
10
5
5
0
0
5
0
5
0
Сигнал рассогласования системы поступает на вход пропорционального звена 1„ Последнее с коэффициентом
пропорциональности Кр вырабатывает напряжение, пропорциональное сигналу рассогласования, которое поступает на вход интегратора 2, с постоянной интегрирования Т и одновременно поступает на входы масштабирующих усилителей 3., и 4, с соответствующими коэффициентами масштабирования, равными -25 и 38. Напряжение с выхода интегратора 2, поступает на вход интегратора 22 и на входы масштабирующих усилителей 32 и 4 с коэффициентами масштабирования, равными соответственно -168 Т;/ТВ и (1+169 Т;/Т0). Выходное напряжение интегратора 2„ поступает на входы масштабирующих усилителей 3j и 4Э с соответствующими коэффициентами масштабирования, равными 360 Tf/Tp и -360 . Затем выходные напряжения масштабирующих усилителей 3,- Зэ суммируются в сумматоре 5« Выходное напряжение сумматора 5 задерживается на время Т- в блоке 6 задержки, напряжение с выхода которого суммируется в сумматоре 7 с выходными напряжениями масштабирующих усилителей 4,- 4Э. Получаемое таким образом на выходе сумматора 7 напряжение используется в качестве управляющего сигнала, который в рассмотренном примере () выделяется на выходе устройства, представленного на фиг о 2, и имеющего передаточную функцию
5
Wpy(р) Kp{l/pTi+ Ро + р,
-,U-L PTI
-sTj, е +
1
-рт,
РТЛ,
+ 0 -i-(l - е-) Ртв
1 /I ) (1 -a
)ll Kpfl/pT; + 1 + V -DJJ + PT0+ Р2тЈ/2 + р тэ/3 +...},
Кр - коэффициент пропорциональности пропорционального звена 1;
То - время задержки блока задержки 6;
Tj - постоянная времени интегрирования интеграторов 2, 2 ц. о
- у ОООу
Из эпюр (фиг0 3 и 4), полученных при применении предлагаемого устройства для коррекции замкнутой системы регулирования с объектом управления, передаточная функция которого W0(p) 2,6/0 + 1,52р + 0,085р2), следует, что качество управления улучшается„ Таким образом, благодаря формированию в устройстве сигнала упреждения более высокой точности удается в дальнейшем повысить точность работы замкнутой системы автоматического управления в динамических режимах
Формула изобретения
Корректирующее устройство, содержащее четыре масштабирующих усилителя, последовательно соединенные пропорциональное звено и первый интегра
тор и последовательно соединенные первый сумматор, блок задержки и второй сумматор, выход пропорционального звена через первый и второй масштабирующие усилители соединен соответственно с первым входом первого и вторым входом второго сумматоров, выходы интегратора через третий и
четвертый масштабирующие усилители соединены соответственно с вторым входом первого и с третьим входом второго сумматоров, причем вход пропорционального звена и выход второго сумматора являются входом и выходом устройства, отличающееся тем, что, с целью увеличения времени упреждения устройства и повышения его точности, в него дополнительно введены N-2 последовательно соединенных интеграторов, где N - порядок высшей производной корректируемого сигнала, и 2 (N-2) масштабирующих усилителей, причем выходы дополнительно введенных интеграторов через соответствующие масштабирующие усилители подключены к соответствующим входам первого и второго сумматоров, а вход второго интегратора соединен
0 с выходом первого интегратора0
0
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления нестационарным объектом | 1990 |
|
SU1756861A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ СИММЕТРИЧНОЙ РАКЕТОЙ | 2007 |
|
RU2374602C2 |
| Следящая система | 1975 |
|
SU550617A1 |
| Способ регулирования тока нагрузки вентильного преобразователя | 1987 |
|
SU1427525A1 |
| Устройство для регулирования скорости электродвигателя постоянного тока | 1976 |
|
SU655049A2 |
| СПОСОБ ФОРМИРОВАНИЯ ПИ-ЗАКОНА РЕГУЛИРОВАНИЯ | 1995 |
|
RU2103715C1 |
| СПОСОБ УПРАВЛЕНИЯ ОБЪЕКТОМ (ВАРИАНТЫ), СИСТЕМА УПРАВЛЕНИЯ (ВАРИАНТЫ), УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ И БЛОК ПОВЫШЕНИЯ АСТАТИЗМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2318234C9 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2621071C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2459226C1 |
Изобретение относится к средствам коррекции систем автоматического управления и может быть использовано для коррекции замкнутых систем управления объектами с транспортным запаздыванием в машиностроении, теплоэнергетике, станкостроении, химической промышленности и т.д. Целью изобретения является увеличение времени упреждения устройства и повышение его точности. Поставленная цель достигается тем, что в устройстве, содержащем две группы масштабирующих усилителей по N усилителей в каждой, сигнал рассогласования замкнутой системы регулирования преобразуется в последовательно соединенных пропорциональном звене и N - 1 интеграторах, где N - порядок высшей производной сигнала рассогласования, учитываемый при коррекции системы. Выходные сигналы пропорционального звена и каждого из интеграторов масштабируются соответствующими усилителями первой группы и суммируются в первом сумматоре и, кроме того, масштабируются соответствующими усилителями второй группы и суммируются во втором сумматоре. Выходной сигнал первого сумматора задерживается по времени и добавляется к слагаемым второго сумматора. Результирующий суммарный сигнал является сигналом управления, позволяющим обеспечить корректируемой системе астатизм нужного порядка и нулевую ошибку упреждения по N-ую производную сигнала рассогласования. 3 ил.
ГЕ
с-т,
штотаы
/V-Ј
/v
fat
Ју-г
V
3/t-i
V;
з
4
I
Фиг.1
«tf
i
т: i
t
«41
I
w / /Ч
t O
ФигЛ
| Зайцев Г„Ф„ и др | |||
| Основы автоматического управления и регулирования - Киев: Техника, 1975, с 167- 172, Патент Японии № 57-18202, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
