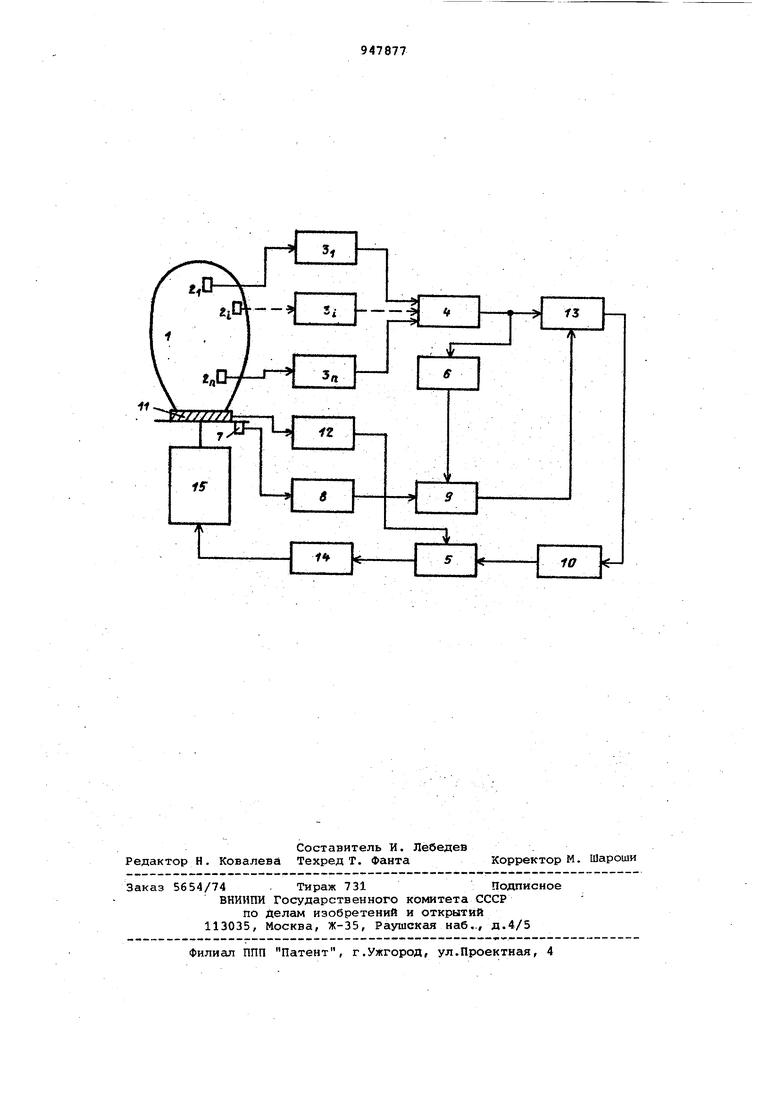
моделью исследуемой системы закреплен датчик силы, выход которого через масштабирующий усилитель соединен с вторым входом первого сумма тора, дополнительно введены датчик положения выходной платформы возбудителя колебаний, инвертирующий уси литель , второй и третий сумматоры и блок задержки сигнала, причем выход датчика положения выходной плат формы возбудителя колебаний через инвертирующий усилитель соединен с первым входом второго сумматора, вы ход которого соединен с первым вход третьего сумматора, выход которого соединен с входом блока формировани обратной передаточной функции колебательного звена, а выход блока задания параметров динамической модели исследуемой системы соединен с вторым входом третьего cyMi iaTopa, связанным с входом блока задержки сигнала, выход которого соединен с вторым входом второго сумматора. На чертеже показана схема предлагаемого устройства. Устройство содержит физическую модель 1 исследуемой системы, датчи ки 2 параметров движения, соединенные через усилители 3 с блоком 4 задания параметров динамической модели исследуемой системы, первый сумматор 5, блок 6 задержки сигнала датчик 7 положения выходной платформы, инвертирующий усилитель 8, второй сумматор 9, блок 10 формиров ния обратной передаточной функции колебательного звена, датчик 11 сил масштабирующий усилитель 12, третий сумматор 13, усилитель 14 мощности, возбудитель 15 колебаний. Устройство работает следующим образом. Модель 1, представляющая собой часть системы с неизвестной структу рой, совершает колебания, задаваемые выходной платформой возбудителя 15. Датчики 2 фиксируют параметр движения реальной части системы 1 в разных местах. Они усиливаются усилителями 3, с рыходов которого сигн лы, пропорциональные.параметрам дви жения, поступают в блок 4, моделиру щий известную часть системы. Блок 4 позволяет легко изменять параметры моделируемой части системы и опреде лять при этом нужный закон движения выходной плaтфop Iы возбудителя 15 колебаний. Моделируемая часть системы взаимодействует с реальной час тью динамической системл, т.е. с моделью 1 через сумматор 13, блок 10 формирования обратной передаточной функции колебательного звена, сумматор 5, усилитель 14 мощности, возбудитель 15 колебаний. Обратная связь по положению выходной платфор мы возбудителя колебаний осуществляется через датчик 7, инвертируквдий уиилитель 8, сумматор 9, на второй вход которого для сравнения подается задержанный сигнал с выхода блока 4, сигнал ошибки суммируется с сигналом с выхода блока 4 сумматором 13. В блоке 10 формируется обратная передаточная функция возбудителя 15 колебаний, не учитывающая запаздыванияW (р) а,,р + а, р + а. коэффициент инерции возбудителя 15 колебаний; а - коэффициент диссипативности упругой подвески; коэффициент жесткости упругой подвески; р - оператор прербрЕ13ования лапПередаточная функция возбудителя 15 колебаний W(p) где -с - время задержки усилителя мощности и возбудителя колебаний ( численно равное времени за держки блока 6. Фактическое значение у полон ения стола возбудителя 15 колебаний у ( 1 е ) х (1 ) (1 ) У (3) т.е. фактическое значение у положения стола возбудителя колебаний равно задержанному требуемому положению X . Но в практических случаях реальная часть модели 1 является динамической системой со многими степенями свободы и поэтому учет влияния инерционных упругих, активных и демпфирующих сил модели 1 на возбудитель колебаний коэффициентами а,, а , а и обратной связи по положению осуществляют приблизительно. С этой целью устройство содержит датчик 11 силы, который измеряет величину силы реакции модели 1 на выходную платформу возбудителя 15 колебаний. С выхода датчика 11 через усилитель 12 на вход cyi iaTopa 5 поступает сигнал, пропорциональный силе реакций реальной части модели 1 на выходную платформу возбудителя 15 колебаний. На другой вход сумматора 5 поступает сигнал, пропорциональный силе (при у хе f) F х(а, + ао) (k) где X - выходной сигнал блока 4, пропорциональный требуемому положению реальной части модели 1. На выходе сумматора 5 формируется напряжение, пропорциональное сумме сил R+F, которое через усилитель 14 мощности передается на возбудитель
15 колебаний таким образом, что на подвижную его часть действует сила стороны входа управления
F R+x(qj, р%-а, ).e, (5)
а со стороны модели 1 я жесткой подвески выходной платфоркел возбудителя 15 колебаний действует сила
F R+y{a2 p%a p + Эо).. (6)
Так как F является возбуждающей силой возбудителя, а F сопротивляющейся движению, то выходная платформа возбудителя 15 колебаний при приложении всякой силы Fy находится в положении, в котором F Fg,,T.e.
Re + хе ( + а р + а) R+У
( а р + ад)
-ср
Так как Re 5;; R , то фактическое
значение у положения выходной платформы возбудителя 15 колебаний практически равно задержанному требуемому положению X.
Таким образом, применение предлагаемого устройства позволяет с более высокой точностью проводить синтез частей колебательной системы, что улучшает качество спроектированных с помощью предлагаемого устройства механизмов.
Формула изобретения
Устройство для полунатурного моделирования нелинейных колебательных систем, содержащее физическую модель исследуемой систе ы, на которой закреплены датчики параметров движения, выходы которых через соответствующие усилители соединены с соответствующими входами бСгока задания параметров динамической модели исследуемой системы, блок формирования обратной передаточной функции колебательного звена, выход которого соединен с первым входом первого сумматора,
выход которого через усилитель мопшск ти соединен с входом возбудителя колебаний, между выходной платформой которого и физической моделью исследуемой системы закреплен датчик силь1,
выход которого через масштабирукиаий усилитель соединен с вторым входом первого сумматора, отличающееся .тем, что, с целью пошлшения точности моделирования, в яего дополнительно введены датчик положения выходной платформы возбудителя колебаний, инвертирующий усилитель, второй и третий сумматоры и блок задержки сигнала причем выход датчика
положения выходной платформы возбудителя колебаний через инвертирующий усилитель соединен с первым входом второго сумматора, выход которого соединен с первым входом третьего
сумматора, выход которого соединен с входом блока формирования обратной передаточной функции колебательного звена, а выход блока задания параметров динамической модели исследуемой системы соединен с вторьм входом третьего сумматора, связанным с входом блока задержки сигнала, выход которого соединен с вторым входом второго сумматора.
Источники информации,
принятые во внимание при экспертизе
Г. Авторское свидетельство СССР 607240, кл. G Об G 7/48, 1975.
2. Авторское свидетельство СССР № 734734, кл. G Об G 7/48, 1976.
3. Авторское свидетельство СССР № 661567, кл. G 06 G 7/48, 1976 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для полунатурного моделирования | 1976 |
|
SU661567A1 |
| Устройство для полунатурного моделированияМЕХАНичЕСКиХ КОлЕбАТЕльНыХ СиСТЕМ | 1979 |
|
SU840963A1 |
| Устройство для моделирования нелинейных колебательных систем | 1975 |
|
SU516057A1 |
| Устройство для моделирования виброударных механических систем | 1977 |
|
SU714420A1 |
| Устройство для моделирования нелинейных колебательных систем | 1975 |
|
SU607240A1 |
| Аддитивный способ и устройство внешнего возбуждения механической колебательной системы вибровискозиметра | 2019 |
|
RU2723159C1 |
| Устройство для полунатурного моделирования | 1976 |
|
SU734734A1 |
| Устройство для полунатурногоМОдЕлиРОВАНия | 1976 |
|
SU822218A2 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
| Устройство для испытания электропривода с упругой механической передачей от двигателя к механизму | 1981 |
|
SU1000950A1 |