Изобретение относится к приборам с инерциальными чувствительными элементами, автономно определяющими плоскость горизонта, и может быть использовано в строительной, горнорудной и авиационной отраслях промышленности, а также при космических и геологических исследованиях. Установка индикатора горизонта в соответствующем трехстепенном подвесе позволяет измерять углы наклона контролируемого направления.
Известные приборы с чувствительными элементами типа уровень или маятниковый отвес, используемые для этих целей, не удовлетворяют совокупности требований применимости и точности при воздействии
низких или высоких температур, давлений и других параметров экстремальных условий. Широкое использование в этих же целях гироскопических и других известных приборов ограничено сложностью их устройства и обслуживания, необходимостью использования специальных источников питания, невысокой надежностью.
Наиболее близким к предлагаемому является прибор, содержащий чувствительную массу, газодинамические опоры ее подвеса в виде стаканов, соединенных с приводными двигателями. Этот прибор может быть использован в качестве датчика горизонта.
ю
00 00 Ч
Однако для его работы необходимы, в частности, система обработки выходной информации и система автоматического регулирования частоты вращения приводных двигателей, что ограничивает возможность использования прибора в полевых и экспериментальных условиях, сужая область его применения.
Цель изобретения - повышение точности. При этом упрощается и процесс индикации положения горизонта и достигается возможность визуальной фиксации его.
Поставленная цель достигается тем, что индикатор горизонта, содержащий корпус, чувствительный элемент, две газодинамические опоры его, приводной двигатель и узел регистрации состояния индикатора, снабжен шестерней, закрепленной на валу двигателя, двумя зубчатыми колесами, жестко связанными с газодинамическими опорами и входящими в зацепление с шестерней, не менее чем одной вставкой из магнитомягкого материала, закрепленной на чувствительном элементе, и не менее чем одним магнитом, установленным на корпусе с возможностью перемещения.
Регистрация состояния индикатора может осуществляться и визуально.
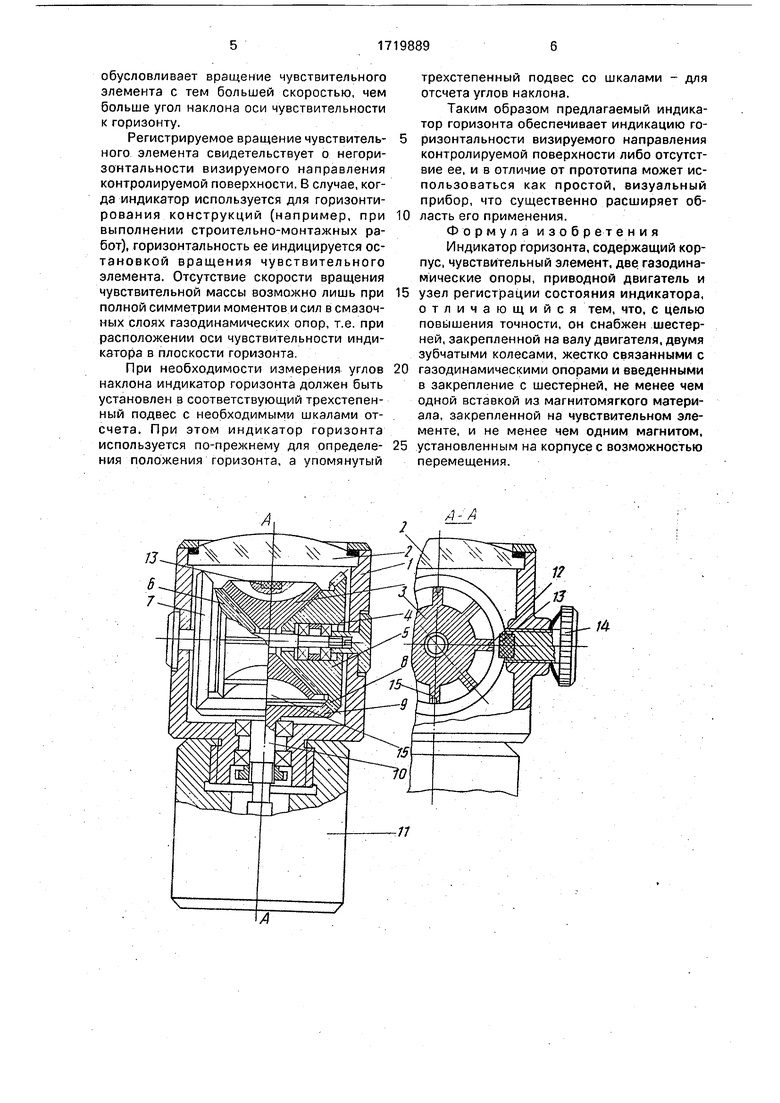
На чертеже представлена конструкция индикатора горизонта, состоящего из корпуса 1 с прозрачным окном 2 и установочным узлом (не показан) и размещенным в нем чувствительным элементом 3 на газодинамических опорах. Подвижно (в подшипниках 4), элементы 5 и 6 газодинамических опор снабжены зубчатыми колесами 7 и 8, входящими в зацепление с шестерней 9 на оси 10 приводного двигателя 11, Установочный узел корпуса (не показан) включает в себя элементы установки прибора на поверхности контролируемого объекта и визир для ориентирования в нужном направлении, В качестве визира могут быть применены, например, оптические или щелевые прицелы, а в простейшем случае, риска или стрелка на корпусе, ориентированная вдоль оси чувствительности.
В рассматриваемом варианте газодинамические опоры подвеса чувствительной массы выполнены коническими со спиральными канавками (возможно применение газодинамической опоры катушечного типа, стаканов - как в прототипе или сферического газодинамического подвеса, а также любых или иных геометрий газодинамических опор совмещенного типа).
Зацепление колес 7 и 8 с шестерней .9 обеспечивает встречное вращение подвижных элементов 5 и 6 газодинамических опор подвеса с одинаковыми угловыми скоростями. Прозрачное окно 2 представляет простейшее исполнение узла регистрации состояния индикатора посредством визуального наблюдения чувствительного
элемента. Другими вариантами этого средства могут быть различные электрооптические системы и устройства, включающие в себя линзы, призмы, зеркала или световоды и т.п.
0 Для изменения порога чувствительности чувствительный элемент 3 снабжен маг- нитомягкими вставками 12, а в корпусе прибора размещены взаимодействующие с ними магниты 13. Изменение положения
5 магнитов, например, винтовым механизмом 14, обеспечивает изменение магнитного взаимодействия с намагничивающимися вставками чувствительного элемента. Совокупность элементов 12, 1.3 и 14 образует
0 блок изменения чувствительности прибора. В простейшем варианте прибора для полевых условий целесообразно использовать в качестве приводного пружинный двигатель 11с ручным подзаводом.
5 Чувствительная масса 3 снабжена .крыльчаткой 15 для более эффективного демпфирования ее движения и отбалансирована относительно оси ее вращения.
Перед использованием прибора осуще0 ствляют подзавод пружинного двигателя.
Для выполнения работ, связанных с индикацией горизонтальности оси чувствительности прибора (аналогично работам с использованием уровней горизонтирова5 ниё балок, плит, элементов конструкций или определение факта их негоризонтальности), прибор с помощью установочного узла (корпуса) устанавливается и ориентируется в нужном направлении.
0 Осуществляется пуск двигателя. При этом .шестерня .9 через колеса 7 и 8 приводит во вращение с одинаковыми противоположно направленными угловыми скоростями подвижные элементы 5 и 6 газодинамиче5 ских опор подвеса чувствительного элемента 3. Возникающие реакции в смазочных (газовых) слоях газодинамического подвеса обусловливают всплытие и вращение (при произвольной ориентации в поле тяготения)
0 чувствительного элемента 3. Ось вращения чувствительного элемента является осью чувствительности прибора,.При произвольной ориентации прибора в поле тяготения ось чувствительности наклонена к плоско5 сти горизонта, что вызывает смещение чувствительной массы вдоль оси чувствительности и неодинаковую толщину смазочных слоев в опорах подвеса. Возникающее при этом нарушение соотношения моментов вязкого трения в гезовых слоях опор
обусловливает вращение чувствительного элемента с тем большей скоростью, чем больше угол наклона оси чувствительности к горизонту.
Регистрируемое вращение чувствитель- ного элемента свидетельствует о негоризонтальности визируемого направления контролируемой поверхности. В случае, когда индикатор используется для горизонти- рования конструкций (например, при выполнении строительно-монтажных работ), горизонтальность ее индицируется остановкой вращения чувствительного элемента. Отсутствие скорости вращения чувствительной массы возможно лишь при полной симметрии моментов и сил в смазочных слоях газодинамических опор, т.е. при расположении оси чувствительности индикатора в плоскости горизонта.
При необходимости измерения углов наклона индикатор горизонта должен быть установлен в соответствующий трехстепенный подвес с необходимыми шкалами отсчета. При этом индикатор горизонта используется по-прежнему для определе- ния положения горизонта, а упомянутый
трехстепенный подвес со шкалами - для отсчета углов наклона.
Таким образом предлагаемый индикатор горизонта обеспечивает индикацию горизонтальности визируемого направления контролируемой поверхности либо отсутствие ее, и в отличие от прототипа может использоваться как простой, визуальный прибор, что существенно расширяет область его применения.
Формула изобретения Индикатор горизонта, содержащий корпус, чувствительный элемент, две газодинамические опоры, приводной двигатель и узел регистрации состояния индикатора, отличающийся тем, что, с целью повышения точности, он снабжен шестерней, закрепленной на валу двигателя, двумя зубчатыми колесами, жестко связанными с газодинамическими опорами и введенными в закрепление с шестерней, не менее чем одной вставкой из магнитомягкого материала, закрепленной на чувствительном элементе, и не менее чем одним магнитом, установленным на корпусе с возможностью перемещения.

| название | год | авторы | номер документа |
|---|---|---|---|
| Инерциальный датчик ускорения и скорости | 1979 |
|
SU857883A2 |
| Инерционный датчик ускорения и скорости "идус | 1975 |
|
SU650017A1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2241957C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ СКВАЖИН | 2011 |
|
RU2459951C1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| ТРЕХСТЕПЕННЫЙ ГИРОСКОП С ШАРОВЫМ ГАЗОДИНАМИЧЕСКИМ ПОДВЕСОМ | 2004 |
|
RU2264596C1 |
| Гиростабилизированная система стабилизации полезной нагрузки беспилотного воздушного судна | 2021 |
|
RU2762217C1 |
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1970 |
|
SU282223A1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2316730C1 |
Изобретение относится к приборам с инерциальными чувствительными элементами, автономно определяющими плоскость горизонта, и может быть использовано в строительной, горнорудной и авиационной отраслях промышленности, а также при космических и геологических исследованиях. Цель изобретения - повыше- . ние точности. Индикатор горизонта состоит из корпуса 1 с установочным узлом, размещенного в нем чувствительного элемента 3 на газодинамических опорах, узла регистрации состояния индикатора, блока изменения чувствительности и приводного двигателя 11. Подвижные элементы 5 и 6 газодинамических опор снабжены зубчатыми колесами 7 и 8, входящими в зацепление с шестерней 9 на валу двигателя. Такая кинематическая связь обеспечивает встречное вращение упомянутых элементов с одинаковыми скоростями. Ось чувствительности прибора совпадает с осью вращения его чувствительного элемента 3, который при достижении плоскости горизонта, в силу полной симметрии сил и моментов в смазочных слоях газодинамических опор, замедляя свое вращение, останавливается. 1 ил. ел с
А-А
12
-/4
| Преобразователь угла наклона | 1983 |
|
SU1221493A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Инерциальный датчик ускорения и скорости | 1979 |
|
SU857883A2 |
