(54) ИНЕРЦИАЛЬНЫЙ ДАТЧИК УСКОРЕНИЯ И СКОРОСТИ

| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный датчик ускорения и скорости "идус | 1975 |
|
SU650017A1 |
| Индикатор горизонта | 1990 |
|
SU1719889A1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2006 |
|
RU2310166C1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241959C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2300079C1 |
| СПОСОБ ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА (ВАРИАНТЫ) И СПОСОБ ЗАПОЛНЕНИЯ ЦИЛИНДРИЧЕСКОГО ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА НЕСМЕШИВАЮЩИМИСЯ ЖИДКОСТЯМИ | 2004 |
|
RU2272252C1 |

I
Изобретение относится к инерциальным чувствительным элементам приборов, автономно измеряющих кажущуюся скорость и ускорение движения объекта и позволяющих задавать программные значения кажущегося ускорения в систему управления движения объекта, и может быть использовано в системах управления летательными аппаратами или в устройствах автоматики.
По основному авт. св. № 650017 известен инерциальный датчик ускорения и скорости, содержащий чувствительный элемент, газодинамические опоры его подвеса, приводной двигатель и датчик положения чувствительного элемента. Газодинамические опоры выполнены в виде двух стаканов, один из которых соединен с ротором двигателя 1 .
Однако это устройство рассчитано на измерение кажущегося ускорения и скорости в пределах одного определенного диапазона их измерения. Кроме того, не предусмотрена возможность использования его в качестве задатчика программных значений
кажущегося ускорения в систему управления движением объекта.
Цель изобретения - расщирение области применения устройства.
Поставленная цель достигается тем, что в инерциальный датчик ускорения и скорости дополнительно введен двигатель, ротор которого соединен с соответствующим стаканом газодинамической опоры.
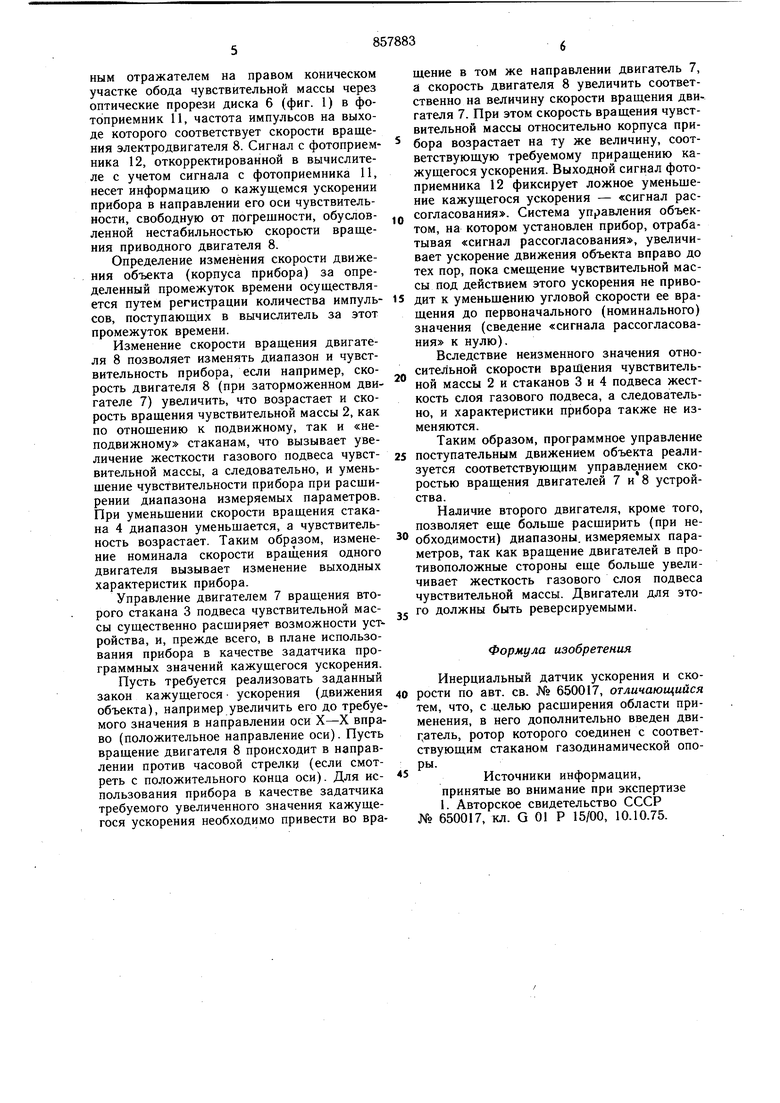
На фиг. 1 представлено предлагаемое устройство, общий вид; на фиг. 2 - сечение А-А на фиг. 1.
Инерциальный датчик ускорения и скорости состоит из корпуса 1 с размещенными в нем чувствительной массой 2, подвещенной в двух совмещенных газодинамических опорах, образованных подвижными стака5 нами 3 и 4, снабженными дисками 5 и 6, с оптическими прорезями, и напрессованных на оси стаканов роторов приводных, в данном варианте электрических двигателей 7 и 8, а также устройства съема и обработки выходного сигнала, имеющего в своем составе источник 9 света: размещенный на ободе чувствительной массы отражатели, приемники 10-12. Чувствительная масса 2, выполненная в виде сплошного диска с центральной цилиндрической втулкой, имеет на внешних цилиндрических поверхностях втулки спиральные микроканавки {элементы профилированной радиальной газодинамической опоры), обозначенные на фиг. 1 пунктиром, а на ободе диска - зеркальные отражатели элементы оптического датчика угловой скорости вращения чувствительной массы 2 вокруг оси (чувствительности ). Подвес чувствительной массы 2 образован двумя совмещенными газодинамическими опорами, конструктивно выполненными в виде стаканов 3 и 4, на торцовых опорных поверхностях которых также нанесены спиральные микроканавки - элементы торцовой газодинамической опоры. Он служит для выполнения функций собственно подвеса чувствительной массы 2 с минимальным трением (вязкостным, так как сухое трение в опорах с газовой смазкой отсутствует полностью) в направлении оси чувствительности X-X и центрирования ее в исходном (нулевом ) положении для приведения чувствительной массы 2 во вращение вокруг оси X-X со скоростью, зависящей от смещения чувствительной массы от ее нулевого (исходного) положения в направлении этой оси, а также для создания восстанавливающей (компенсирующей) силы, действующей на чувствительную массу в отклоненном положении (например, при ускоренном движении прибора совместно с объектом, на котором он установлен, в направлении оси чувствительности X-X) и стремящейся вернуть ее в исходное (нулевое) положение. Диски 5 и б снабжены оптическими прорезями - элементами оптического датчика угловой скорости вращения стаканов 3 и 4, приводами которых служат электродвигатели (в данном варианте конструкции) 7 и 8, заторможенные при отсутствии питания (при отсутствии активного момента вращения их роторов). В качестве приводных двигателей могут быть использованы двигатели любого другого типа, обеспечивающие стабильность и регулируемость скорости вращения (например, пневматические). Фотоприемники 10-12 являются элементами схемы управления двигателями и схемы обработки выходной информации. Устройство работает следующим образом. При подаче питания на один из электродвигателей, например 8, приводится во вращение подвижный стакан 4, увлекая за собой чувствительную массу 2, тормозящуюся с другой стороны неподвижным в рассматриваемом режиме работы устройства стаканом 3 и имеющую поэтому скорость вращения, меньшую скорости вращения подвижного стакана 4. Возникающие при этом реакции в смазочных (газовых) слоях совмещенных газодинамических опор со спиральными канавками подвижного 4 и неподвижного 3 стаканов обуславливают всплытие и центрирование в подвесе чувствительной массы 2 и дальнейшее вращение ее под действием сил вязкого трения вокруг оси чувствительности со скоростью, которая при отсутствии кажущегося ускорения прибора вдоль этой оси теоретически равна половине номинальной скорости вращения электродвигателя 8. В этом исходном состоянии прибора поток света источника 9, отражаясь от локальных зеркальных участков на цилиндрической части обода чувствительной массы 2 (фиг. 2) попадает в фотоприемник 12 и вызывает появление на выходе последнего электрических импульсов, частота которых соответствует номинальной скорости вращения чувствительной массы. При действии кажущегося ускорения в направлении оси чувствительности X-X (ускоренное движение прибора или наклон его относительно плоскости горизонта в поле тяготения) смещается чувствительная масса 2, изменяя толщины смазочных слоев в области торцовых участков несущих поверхностей опор подвеса. Возникающее при этом нарушение соотнощения сил вязкого трения на торцовых поверхностях чувствительной массы (с увеличением толщины смазочного слоя трение уменьшается и наоборот) приводит к изменению ее скорости вращения, а следовательно, и частоты электрических импульсов на выходе фотоприемника 12, свидетельствуя о величине и направлении действующего ускорения. Действие кажущегося ускорения в направлении перпендикулярном оси чувствительности не вызывает изменения частоты выходных импульсов, так как смещение чувствительности массы в радиальном направлении в равной степени изменяет тормозящие и вращающие силы вязкого трения на цилиндрических поверхностях газодинамических опор подвижного и «неподвижного стаканов и, следовательно, не приводит к изменению скорости вращения чувствительной массы. Таким образом, важным свойст- вом предлагаемого прибора является нечувствительность его к поперечным (перекрестным) ускорениям. Однако нестабильность скорости вращения подвижного стакана 4, вследствие, например, случайного изменения параметров питания электродвигателя 8 непосредственно вносит ошибку в его показания. Для устранения этого явления необходимо постоянно корректировать получаемую с фотоприемника 12 информацию в зависимости от дрейфа скорости вращения электродвигателя 8, что и осуществляется вторым каналом устройства съема выходного сигнала. Поток света источника 9 направляется сплошным отражателем на правом коническом участке обода чувствительной массы через оптические прорези диска 6 (фиг. 1) в фотоприемник 11, частота импульсов на выходе которого соответствует скорости вращения электродвигателя 8. Сигнал с фотоприемника 12, откорректированной в вычислителе с учетом сигнала с фотоприемника 11, несет информацию о кажущемся ускорении прибора в направлении его оси чувствительности, свободную от погрещности, обусловленной нестабильностью скорости вращения приводного двигателя 8.
Определение изменения скорости движения объекта (корпуса прибора) за определенный промежуток времени осуществляется путем регистрации количества импульсов, поступающих в вычислитель за этот промежуток времени.
Изменение скорости вращения двигателя 8 позволяет изменять диапазон и чувствительность прибора, если например, скорость двигателя 8 (при заторможенном двигателе 7) увеличить, что возрастает и скорость вращения чувствительной массы 2, как по отношению к подвижному, так и «неподвижному стаканам, что вызывает увеличение жесткости газового подвеса чувствительной массы, а следовательно, и уменьщение чувствительности прибора при расщирении диапазона измеряемых параметров. При уменьшении скорости вращения стакана 4 диапазон уменьшается, а чувствительность возрастает. Таким образом, изменение номинала скорости вращения одного двигателя вызывает изменение выходных характеристик прибора.
Управление двигателем 7 вращения второго стакана 3 подвеса чувствительной массы существенно расширяет возможности устройства, и, прежде всего, в плане использования прибора в качестве задатчика программных значений кажущегося ускорения.
Пусть требуется реализовать заданный закон кажущегося ускорения (движения объекта), например увеличить его до требуемого значения в направлении оси X-X вправо (положительное направление оси). Пусть вращение двигателя 8 происходит в направлении против часовой стрелки (если смотреть с положительного конца оси). Для использования прибора в качестве задатчика требуемого увеличенного значения кажущегося ускорения необходимо привести во вращение в том же направлении двигатель 7, а скорость двигателя 8 увеличить соответственно на величину скорости вращения двигателя 7. При этом скорость вращения чувствительной массы относительно корпуса прибора возрастает на ту же величину, соответствующую требуемому приращению кажущегося ускорения. Выходной сигнал фотоприемника 12 фиксирует ложное уменьщение кажущегося ускорения - «сигнал рассогласования. Система управления объектом, на котором установлен прибор, отрабатывая «сигнал рассогласования, увеличивает ускорение движения объекта вправо до тех пор, пока смещение чувствительной массы под действием этого ускорения не приводит к уменьщению угловой скорости ее вращения до первоначального (номинального) значения (сведение «сигнала рассогласования к нулю).
Вследствие неизменного значения относительной скорости вращения чувствительной массы 2 и стаканов 3 и 4 подвеса жесткость слоя газового подвеса, а следовательно, и характеристики прибора также не изменяются.
Таким образом, программное управление
поступательным движением объекта реализуется соответствующим управле 1ием скоростью вращения двигателей 7 и 8 устройства.
Наличие второго двигателя, кроме того, позволяет еще больще расширить (при необходимости) диапазоны, измеряемых параметров, так как вращение двигателей в проивоположные стороны еще больше увелиивает жесткость газового слоя подвеса увствительной массы. Двигатели для этоо должны быть реверсируемыми.
Формула изобретения
Инерциальный датчик ускорения и скорости по авт. св. № 650017, отличающийся тем, что, с целью расширения области применения, в него дополнительно введен двиг атель, ротор которого соединен с соответствующим стаканом газодинамической опоРыИсточники информации,
принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 650017, кл. G 01 Р 15/00, 10.10.75.
