Изобретение относится к области измерительной техники и может быть использовано при разработке и изготовлении приборов для систем стабилизации, навигации и топопривязки объектов наземной техники.
Известна система самоориентирующаяся гироскопическая курсокреноуказания [1], обеспечивающая работу в режиме гирокомпаса во время стоянки объекта и режиме гироазимута во время стоянки и в движении при наклонах корпуса объекта, содержащая блок азимутальный, состоящий из внутренней рамы карданова подвеса с датчиком угла курса, датчиком стабилизирующего момента, усилителя стабилизации и гироскопического чувствительного элемента, блок горизонтальный, состоящий из карданова подвеса с датчиками угла тангажа и крена, датчиками стабилизирующего момента, усилителей стабилизации, датчиков наклона, усилителей коррекции и гироскопического чувствительного элемента, управляющее устройство, состоящее из усилителя привода в меридиан, переключателя режимов с первым и вторым контактами, двух ограничителей, цифрового устройства, и преобразователь угол-код.
Недостатком известной системы самоориентирующейся гироскопической курсокреноуказания [1] является значительное время определения азимута при больших начальных углах отклонения главной оси гироскопического чувствительного элемента блока азимутального от направления меридиана.
Известна система самоориентирующаяся гироскопическая курсокреноуказания [2], обеспечивающая работу в режиме гирокомпаса во время стоянки объекта и режиме гироазимута, принятая в качестве прототипа, в состав которой дополнительно введены аналого-цифровые преобразователи, связанные с датчиками момента гироскопического чувствительного элемента блока горизонтального, цифровое устройство и устройство форсированного разворота, что позволяет предварительно грубо оценить направление меридиана и за счет последующего принудительного прецессионного разворота гироскопического чувствительного элемента блока азимутального к вычисленному направлению сократить время определения азимута.
Недостатком известной системы самоориентирующейся гироскопической курсокреноуказания [2] является низкая точность определения азимута, что вызвано использованием для измерений гироскопического чувствительного элемента, работающего в курсовом положении, которое с точки зрения модели погрешностей гироскопа является неблагоприятным для достижения максимальной точности, и отсутствием возможности автокомпенсации погрешностей гироскопического чувствительного элемента при определении направления меридиана, например, за счет его быстрых разворотов в азимуте, а также значительное время определения азимута, в которое входит дополнительное время на принудительный прецессионный разворот гироскопического чувствительного элемента блока азимутального к искомому направлению после грубого определения направления меридиана в цифровом устройстве.
Наиболее близкой по совокупности признаков к предполагаемому изобретению является система самоориентирующаяся гироскопическая курсокреноуказания, имеющая следующие существенные признаки, тождественные прототипу [2]: трехстепенной карданов подвес, датчики угла и датчики момента, установленные по осям подвеса, гироскопические чувствительные элементы и датчики наклона, установленные на рамах карданова подвеса, и блок управления, функционально объединяющий в своем составе усилители стабилизации, аналого-цифровые преобразователи, цифровое устройство, преобразователь угол-код и устройство форсированного разворота устройства-прототипа, причем один из гироскопических чувствительных элементов установлен на внутренней раме карданова подвеса и работает в курсовой ориентации, при которой одна из его измерительных осей расположена вертикально, параллельно оси внутренней рамы, а другой гироскопический чувствительный элемент работает в вертикальной ориентации, при которой его измерительная ось или измерительные оси расположены в плоскости горизонта, и может располагаться на средней раме карданова подвеса, причем выход гироскопического чувствительного элемента, установленного на внутренней раме карданова подвеса соединен с первым входом блока управления, первый выход которого соединен с датчиком момента внутренней рамы карданова подвеса, а выход другого гироскопического чувствительного элемента соединен с вторым входом блока управления.
Изобретение направлено на сокращение времени и повышение точности определения азимута системой самоориентирующейся гироскопической курсокреноуказания в режиме гирокомпаса с обеспечением возможности хранения заданного направления в режиме гироазимута.
Это достигается тем, что в первом варианте в систему самоориентирующуюся гироскопическую курсокреноуказания, включающую корпус прибора с размещенным внутри него трехстепенным кардановым подвесом, датчики угла и датчики момента, установленные по осям подвеса, гироскопические чувствительные элементы и датчики наклона, установленные на рамах карданова подвеса, и блок управления, причем один из гироскопических чувствительных элементов установлен на внутренней раме карданова подвеса и работает в курсовой ориентации, при которой одна из его измерительных осей расположена вертикально, параллельно оси внутренней рамы, а его выход соединен с первым входом блока управления, первый выход которого связан с датчиком момента внутренней рамы карданова подвеса, а другой гироскопический чувствительный элемент установлен на средней раме карданова подвеса и работает в вертикальной ориентации, при которой его измерительная ось или измерительные оси расположены в плоскости горизонта, а его выход соединен с вторым входом блока управления, введены дополнительная рама карданова подвеса и устройство ее поворота, причем наружные оси трехстепенного карданова подвеса с гироскопическими чувствительными элементами и датчиками наклона установлены в дополнительной раме перпендикулярно ее осям, которые установлены в корпусе прибора по нормали к плоскости основания объекта с возможностью обеспечения разворота гироскопического чувствительного элемента, работающего в вертикальной ориентации, вокруг вертикальной оси, при этом одна из осей дополнительной рамы соединена с корпусом прибора через устройство ее поворота, вход которого соединен с вторым выходом блока управления.
Это достигается тем, что во втором варианте устройства в систему самоориентирующуюся гироскопическую курсокреноуказания, включающую трехстепенной карданов подвес, причем наружные оси карданова подвеса установлены в корпусе прибора, датчики угла и датчики момента, установленные по осям подвеса, гироскопические чувствительные элементы и датчики наклона, установленные на рамах карданова подвеса, и блок управления, причем один из гироскопических чувствительных элементов установлен на внутренней раме карданова подвеса и работает в курсовой ориентации, при которой одна из его измерительных осей расположена вертикально, параллельно оси внутренней рамы, а его выход соединен с первым входом блока управления, первый выход которого связан с датчиком момента внутренней рамы карданова подвеса, а другой гироскопический чувствительный элемент работает в вертикальной ориентации, при которой его измерительная ось или измерительные оси расположены в плоскости горизонта, а его выход соединен с вторым входом блока управления, введены дополнительная рама карданова подвеса и устройство ее поворота, причем гироскопический чувствительный элемент, работающий в вертикальной ориентации, установлен на дополнительной раме, при этом его измерительная ось или измерительные оси перпендикулярны осям дополнительной рамы, оси которой установлены в средней раме карданова подвеса перпендикулярно ее осям с возможностью обеспечения разворота гироскопического чувствительного элемента, работающего в вертикальной ориентации, вокруг вертикальной оси, при этом одна из осей дополнительной рамы соединена со средней рамой карданова подвеса через устройство ее поворота, вход которого соединен с вторым выходом блока управления.
В частной реализации системы самоориентирующейся гироскопической курсокреноуказания по обоим вариантам блок управления может быть реализован на микропроцессорном устройстве.
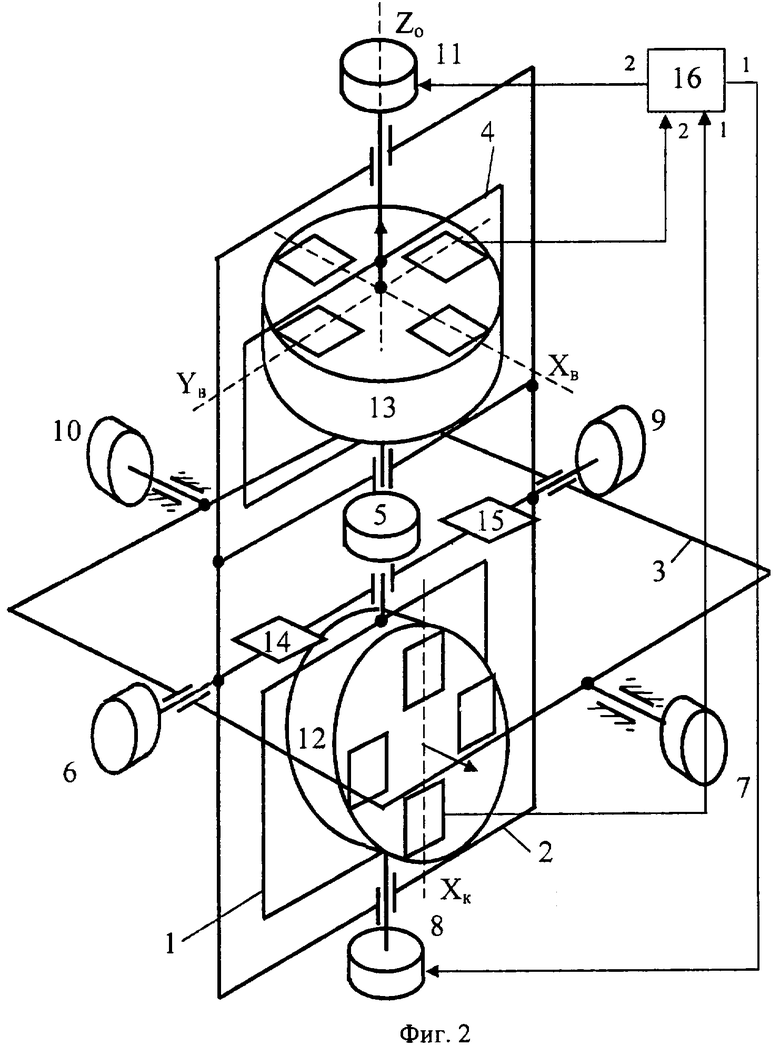
Сущность заявляемых устройств поясняется чертежами (Фиг.1, 2), на которых представлены варианты реализации системы самоориентирующейся гироскопической курсокреноуказания (далее системы) по предлагаемому изобретению.
Предлагаемая система содержит (см. Фиг.1, 2) корпус (на чертеже не показан), трехстепенной карданов подвес, образованный рамами внутренней 1, средней 2 и наружной 3, установленный в системе по первому варианту (см. Фиг.1) своими наружными осями (осями рамы 3) в дополнительной раме 4 перпендикулярно ее осям, в системе по второму варианту - в корпусе прибора, дополнительную раму 4, установленную в системе по первому варианту своими осями в корпусе прибора по нормали к плоскости основания объекта, а в системе по второму варианту (см. Фиг.2) - на средней раме 2 карданова подвеса перпендикулярно ее осям, датчики угла 5, 6, 7 и датчики момента 8, 9, 10, установленные по осям подвеса, устройство поворота 11 дополнительной рамы 4, установленное на ее оси, через которое дополнительная рама 4 соединена в системе по первому варианту с корпусом, а в системе по второму варианту - со средней рамой 2 карданова подвеса, гироскопические чувствительные элементы 12, 13, датчики наклона 14, 15, блок управления 16.
Гироскопический чувствительный элемент 12 работает в курсовой ориентации и установлен на внутренней раме 1 карданова подвеса, при этом измерительная ось Хк гироскопического чувствительного элемента 12 вертикальна и параллельна оси внутренней рамы 1.
Гироскопический чувствительный элемент 13 работает в вертикальной ориентации, при которой его измерительная ось Хв или измерительные оси Хв или Yв расположены в плоскости горизонта. Гироскопический чувствительный элемент 13 установлен в системе по первому варианту на средней раме 2 карданова подвеса, а в системе по второму варианту - на дополнительной раме 4. При этом в системах по обоим вариантам дополнительная рама 4 установлена с возможностью обеспечения разворота гироскопического чувствительного элемента 13, работающего в вертикальной ориентации, вокруг вертикальной оси.
Первый и второй входы блока управления 16 подключены к выходам гироскопических чувствительных элементов 12 и 13, первый выход - к датчику момента 8 внутренней рамы карданова подвеса, а второй выход - к входу устройства поворота 11.
В частной реализации функции блока управления 16, включающие функции усилителей стабилизации, аналого-цифровых преобразователей, цифрового устройства, преобразователя угол-код и устройства форсированного разворота устройства-прототипа, могут быть реализованы с помощью микропроцессорного устройства.
Предлагаемая система работает следующим образом.
При включении системы питание подается на блок управления 16, датчики угла 5, 6, 7, датчики момента 8, 9, 10, устройство поворота 11, гироскопические чувствительные элементы 12, 13 и датчики наклона 14, 15.
После включения по сигналам датчиков наклона 14, 15 вырабатываются сигналы коррекции, с помощью которых средняя рама 2 с измерительными осями Хв, Yв гироскопического чувствительного элемента 13 выставляются в плоскость горизонта, а ось чувствительности Хк гироскопического чувствительного элемента 12 выставляется по направлению местной вертикали. В процессе выставки осуществляется силовая стабилизация положения средней рамы 2 карданова подвеса по сигналам гироскопического чувствительного элемента 13 датчиками момента 9, 10. Внутренняя рама 1 стабилизируется по сигналам гироскопического чувствительного элемента 12 датчиком момента 8 сигналом, вырабатываемым блоком управления 16.
После завершения процесса выставки система работает в режиме гирокомпаса. В этом режиме по сигналам датчиков наклона 14, 15 средняя рама 2 удерживается в плоскости горизонта, а по сигналам гироскопического чувствительного элемента 13 в блоке управления 16 аналитически рассчитывается азимут объекта. Для этого начальный сигнал о величине горизонтальной составляющей угловой скорости вращения Земли с выхода гироскопического чувствительного элемента 13 по второму входу поступает в блок управления 16, где запоминается. После запоминания первого значения горизонтальной составляющей угловой скорости вращения Земли с второго выхода блока управления 16 на вход устройства поворота 11 дополнительной рамы 4 карданова подвеса подается сигнал, по которому производится быстрый непрецессионный разворот гироскопического чувствительного элемента 13 вокруг вертикальной оси Zo в новое положение. В новом положении измеряется новое значение горизонтальной составляющей угловой скорости вращения Земли, которое поступает в блок управления 16 и запоминается. Количество положений, в которых измеряются составляющие угловой скорости вращения Земли, и их расположение выбираются исходя из принятого алгоритма определения азимута, примеры которых приведены в [3]. Функции блока управления 16 могут быть реализованы с помощью микропроцессорного устройства. По результатам выполненных замеров с помощью программы, построенной по алгоритмам [3] и загружаемой в микропроцессорное устройство, аналитически по формулам [3] рассчитывается исходный азимут объекта.
Задание необходимых углов поворота дополнительной рамы 4 осуществляется с помощью устройства поворота 11, представляющего собой, например, шаговый позиционный механизм или электромеханический датчик момента, при этом для измерения положения дополнительной рамы 4 может использоваться информация с датчика угла 5.
После завершения режима гирокомпаса (определения исходного азимута) система работает в режиме гироазимута. В этом режиме средняя рама 2 датчиками момента 9, 10 по сигналам датчиков наклона 14, 15 и гироскопического чувствительного элемента 13 удерживается в плоскости горизонта, а сигнал с выхода гироскопического чувствительного элемента 12, работающего в курсовой ориентации, поступающий по первому входу в блок управления 16, используется для стабилизации положения внутренней рамы 2 карданова подвеса в азимуте с помощью датчика момента 8 по сигналам, вырабатываемым по первому выходу блока управления 16. Наклоны подвижного объекта измеряются датчиками угла 6, 7, а при разворотах по курсу сигнал об азимуте подвижного объекта формируется датчиком угла 5.
Таким образом, за счет реализации измерения азимута гироскопическим чувствительным элементом (например, динамически настраиваемым гироскопом (ДНГ)), работающим в благоприятных для его точности условиях (в вертикальной ориентации, при которой его измерительные оси (оси ДНГ) расположены в плоскости горизонта), обеспечения возможности при определении азимута мгновенного разворота гироскопического чувствительного элемента, работающего в вертикальной ориентации, вокруг вертикальной оси, путем введения дополнительной рамы карданова подвеса и устройства поворота, установки дополнительной рамы в системе по первому варианту между корпусом устройства и трехстепенным кардановым подвесом с курсовым и вертикальным гироскопами, с осями дополнительной рамы, ориентированными по нормали к основанию объекта, в системе по второму варианту - на средней раме карданова подвеса с осями дополнительной рамы, ориентированными перпендикулярно осям средней рамы, введения новой связи между блоком управления и устройством поворота дополнительной рамы и реализации соответствующего управления устройством поворота от блока управления предлагаемая система самоориентирующаяся гироскопическая курсокреноуказания позволяет повысить точность, сократить время определения азимута объекта и обеспечить работу в режиме хранения направления, в отличие от известных компасных устройств с аналитическим методом измерения азимута, представленных, например, в [3].
Реализация предлагаемой системы возможна на стандартных серийных электронных и механических компонентах. В качестве гироскопических чувствительных элементов возможно применение динамически настраиваемых гироскопов, а также других типов гироскопических чувствительных элементов, например, лазерных или волоконно-оптических.
Библиографические данные
1. Патент РФ №2124184, МПК 6 G01С 19/38, приоритет 15.12.96.
2. Патент РФ №2165074, МПК 7 G01С 19/38, приоритет 6.10.99.
3. Шестов С.А., Мокрышев С.В. Развитие наземных гирокомпасов, построенных на основе гиротахометров // Гироскопия и навигация. - 2000. - №1 (28). - с.95-112.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2004 |
|
RU2274832C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2207506C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2166733C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО АЗИМУТА СИСТЕМОЙ САМООРИЕНТИРУЮЩЕЙСЯ ГИРОСКОПИЧЕСКОЙ | 2009 |
|
RU2407989C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОДОЛЬНОГО И ПОПЕРЕЧНОГО НАКЛОНОВ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2002 |
|
RU2237867C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КУРСА ОБЪЕКТА И САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОУКАЗАНИЯ | 2000 |
|
RU2186338C1 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |
Изобретение относится к области измерительной техники и может быть использовано при разработке и изготовлении приборов для систем стабилизации, навигации и топопривязки объектов наземной техники. Система содержит трехстепенной карданов подвес с датчиками угла и датчиками момента по его осям, гироскопические чувствительные элементы, датчики наклона и блок управления. С помощью дополнительной рамы карданова подвеса и устройства ее поворота обеспечивается разворот одного из гироскопических чувствительных элементов, установленных в трехосном кардановом подвесе, работающего в вертикальной ориентации, вокруг вертикальной оси, что позволяет сократить время и повысить точность определения азимута, обеспечить возможность хранения заданного направления. 2 н. и 2 з.п. ф-лы, 2 ил.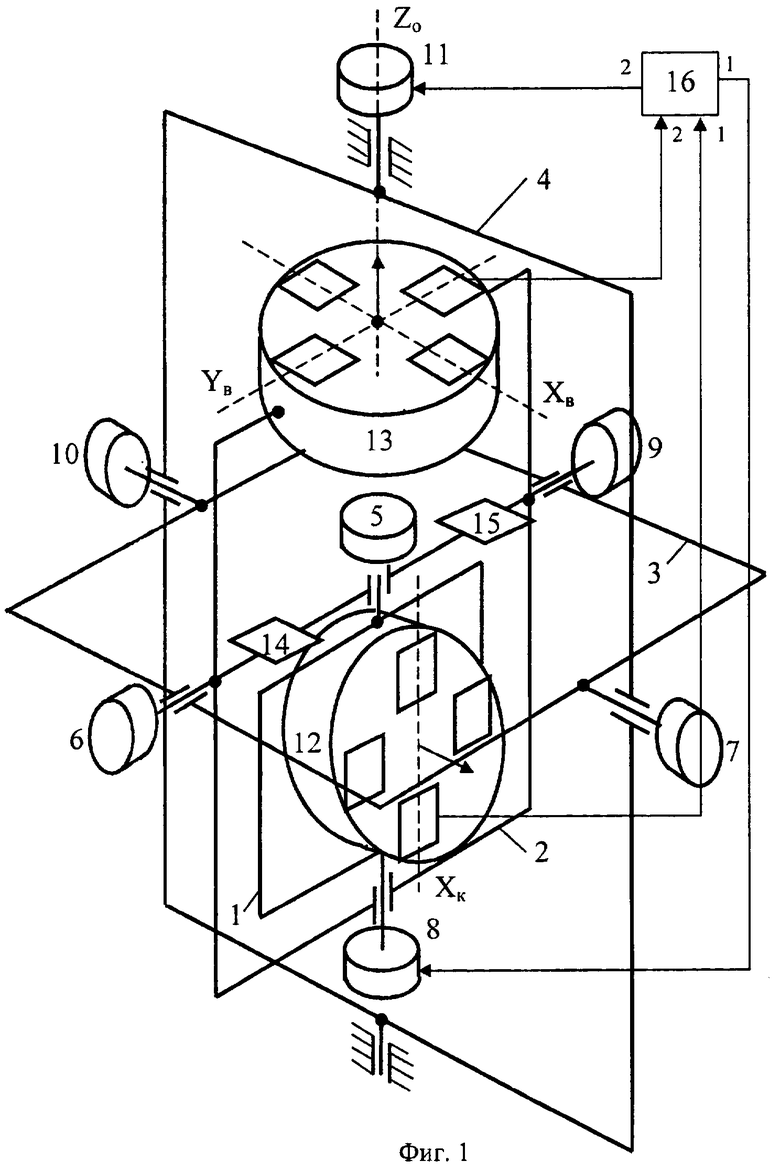
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2003 |
|
RU2258205C1 |
| US 5416976 A, 23.05.1995. | |||

