Изобретение относится к приборостроению, в частности к маятникам, используемым в системах стабилизации положения (например, рамы виноградоуборочного комбайна портального типа).
Известен маятниковый механизм, содержащий маятник в виде стержня с грузом, связанный с основанием передачей, которая выполнена зубчатой в виде .сектора с криволинейной поверхностью и цилиндра.
Недостатком известного механизма являются его большие габариты при малом периоде колебаний.
Цель изобретения - уменьшение габаритов при увеличении периода колебаний.
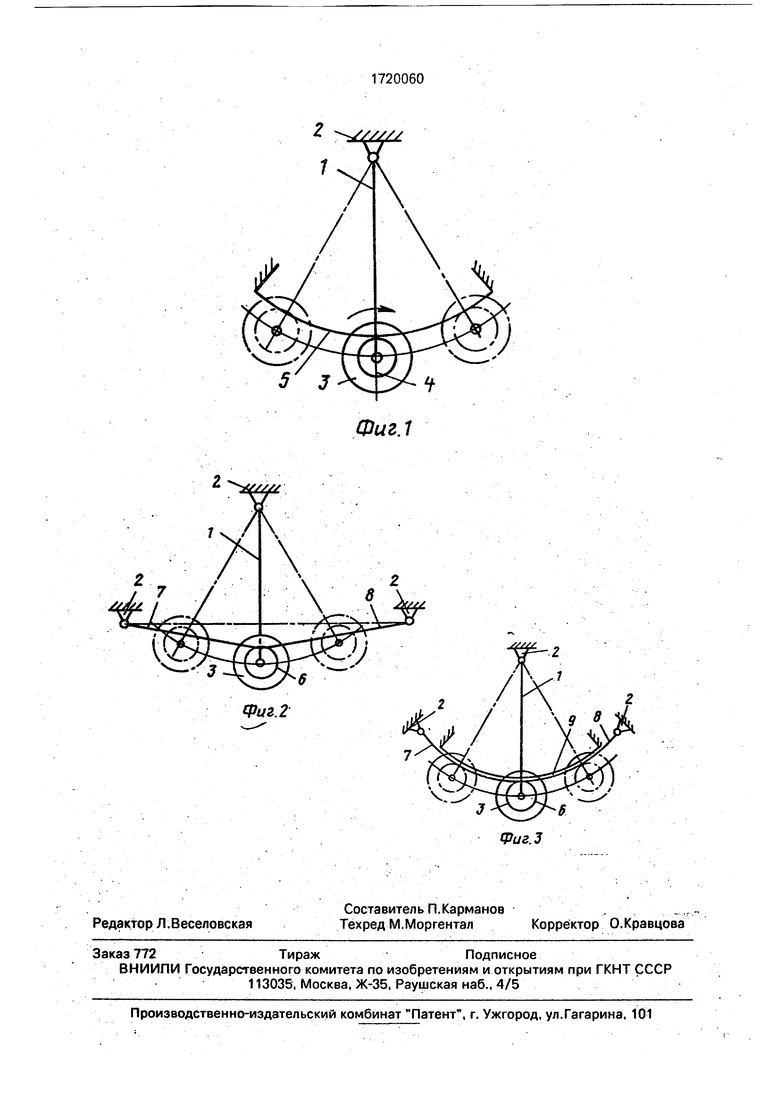
На фиг. 1 схематично показан маятник с кинематической связью груза с опорой посредством зубчатого зацепления; на фиг. 2 - то же, но с кинематической связью груза с опорой, выполненной-посредством нити, намотанной на цилиндрическую поверхность груза и концами закрепленной на
опоре; на фиг, 3 - то же, но с размещением нити на криволинейной направляющей.
Маятник (фиг. 1) содержит стержень 1, закрепленный с возможностью поворота на опоре 2, груз 3, установленный с возможностью поворота на стержне 1. Груз 3 выполнен в виде цилиндра со ступенями разного диаметра и имеет зубчатый венец 4, находящийся в зацеплении с зубчатым сектором 5.
Маятник, показанный на фиг. 2, вместо зубчатого венца имеет гладкую цилиндрическую поверхность 6. На последней намотана нить (несколько витков), концы 7 и 8 которой закреплены на опоре2.
Маятник, показанный на фиг. 3, имеет направляющую 9, на которой уложена нить.
Маятник работает следующим образом.
За исходное положение маятника принимаем отклоненное вправо положение (см. фиг. 1).
В этом положении маятник имеет определенную потенциальную энергию. После освобождения маятника он под действием
10
С
ы to о о о о
веса груза перемещается к нейтральному, среднему, положению, расходуя свою потенциальную энергию. При этом груз 3 совершает криволинейное движение по дуге и одновременно посредством зубчатого зацепления вращается относительно оси его крепления к стержню 1. В нейтральном положении груз 3 имеет максимум кинематической энергии, максимальную линейную скорость и максимальную угловую скорость вращения.
Из нейтрального положения маятник по инерции перемещается влево. При этом движении кинематическая энергия груза переходит в его потенциальную энергию. Из крайнего левого положения маятник перемещается вправо через нейтральное положение в исходное. В последующем работа маятника повторяется.
Маятник, показанный на фиг. 2, работает следующим образом.
За исходное положение принимаем также отклоненное вправо. После освобождения маятника он под действием веса груза перемещается к. нейтральному, среднему, положению. При этом груз 3 совершает криволинейное движение по дуге и одновременно вращается относительно оси его крепления к стержню 1, так как правый конец 8 нити сматывается с цилиндрической поверхности 6, а левый конец 7 нити наматывается на ту же цилиндрическую поверхность. В среднем положении груз 3 имеет максимальную скорость криволинейного движения и максимальную угловую скорость вращения. Из среднего положения маятник продолжает перемещаться по инерции влево до крайнего левого положения. Затем маятник перемещается вправо через нейтральное положение а исходное состояние. При этом левый конец 7 нити сматывается с цилиндрической поверхности б, а правый конец 8 нити наматывается на ту же цилиндрическую поверхность 6. В последующем работа маятника повторяется.
Особенностью маятника, показанного на фиг, 2, является то, что для различных положений груза изменяется минимальная длина нити,необходимая для соединения груза с опорой..Поэтому в процессе колебания маятника передаточное отношение кинематической связи будет также изменяться. Однако для небольших углов колебания и- при увеличении расстояния
между точками крепления нити на опоре изменение передаточного отношения кинематической связи незначительно и практически не влияет на характер работы
маятника, а величина периода колебаний маятника существенно не отличается от фактического значения.
Изменение передаточного отношения кинематической связи может быть исключено введением в его конструкцию направляющей 9 (см. фиг. 3). В этой конструкции маятника необходимая минимальная длина нити для соединения груза с опорой остается постоянной при всех положениях маятника. Этот маятник по постоянству передаточного отношения кинематической связи аналогичен Маятнику, показанному на фиг. 1, однако проще (дешевле) в изготовлении.
Работа маятника, показанного на фиг. 3. аналогична работе маятника, показанного на фиг. 2.
П рименение изобретения обеспечивает уменьшение габаритов и материалоемкости, так как при использовании маятника в системах с замедленным режимом регулирования не требуется увеличивать длину его стержня или включать в конструкцию бак с маслом для размещения маятника либо противовес.
Формула изобретения
1.Маятник, содержащий свободно закрепленный на основании стержень с грузом на конце, связанным с основанием передачей, выполненной в виде сектора с криволинейной поверхностью и цилиндра, отличающийся тем. что, е целью уменьшения габаритов при увеличении периода колебаний, сектор закреплен на основании, а груз выполнен за одно целое с цилиндром, закрепленным на стержне с возможностью вращения.
2.Маятник по п. 1,отличающийся тем, что груз выполнен в виде ступенчатого
цилиндра и размещен под криволинейной поверхностью сектора, а передача выполнена в виде нити, охватывающей груз по цилиндрической поверхности и концами.
закрепленной на основании, причем нить размещена на криволинейной поверхности с радиусом кривизны, равным разности длины стержня и радиуса цилиндрической поверхности груза, с центром кривизны в
точке крепления стержня.
5 3
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВУЧАЯ ПРИБРЕЖНАЯ ГИДРОВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ | 2014 |
|
RU2626188C2 |
| МАЯТНИКОВЫЙ ГИДРОВОЛНОВОЙ ГЕНЕРАТОР ЭЛЕКТРИЧЕСКОГО ТОКА | 2012 |
|
RU2615288C2 |
| МАСЛООТДЕЛЯЮЩИЙ ПРЕСС | 1994 |
|
RU2086615C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВОЛН | 2016 |
|
RU2655418C2 |
| СУДНО С ГИДРОВОЛНОВОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2014 |
|
RU2603813C2 |
| РОЛИКОВЫЕ КОНЬКИ | 2003 |
|
RU2252809C2 |
| МЕХАНИЗМ АВТОПОДЗАВОДА ЧАСОВ, ЧАСЫ С МЕХАНИЗМОМ АВТОПОДЗАВОДА И СПОСОБ АВТОПОДЗАВОДА ЧАСОВ | 2011 |
|
RU2482530C1 |
| Устройство для стабилизации положения кузова транспортного средства | 1979 |
|
SU1111679A3 |
| Устройство для стряхивания плодов | 1987 |
|
SU1419578A1 |
| Устройство для измерения массы тела в невесомости | 1981 |
|
SU981831A1 |
Изобретение относится к приборостроению и может быть использовано в системах стабилизации положения. Целью изобретения является уменьшение габаритов при увеличении периода колебаний. При движении объекта маятник, выполненный в виде стержня 1 с грузом 3, совершает колебательные движения относительно нейтрального положения. Это движение маятника передается на опору с помощью передачи. Передача в одном из вариантов может быть выполнена в виде зубчатого зацепления, образованного цилиндром с зубчатым венцом, установленного с возможностью вращения на конце стержня и сектора с криволинейной зубчатой поверхностью. В другом варианте передача выполнена в виде закрепленной на опоре 2 нити 7, охватывающей груз по цилиндрической поверхности 6 и размещенной на криволинейной направляющей 9.3 ил.
Фиг. 2
Фиг.1
z
ч;
| Устройство для гашения продольных колебаний вагонов подвесных канатных дорог | 1980 |
|
SU906756A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
