приемник в каждой паре разделены заслонкой 10, закрепленной на оси рамы 3. Сигнал с датчика 11 положения поступает на один из входов двухуровневого компаратора 20. После сравнения входного сигнала с сигналом постоянного уровня формируется управляющий сигнал, который управляет обмотка датчика 6 момента. Для задания требуемой угловой скорости вращения наружной рамы 4 и соответственно платформы 5 с объектом испытаний создается
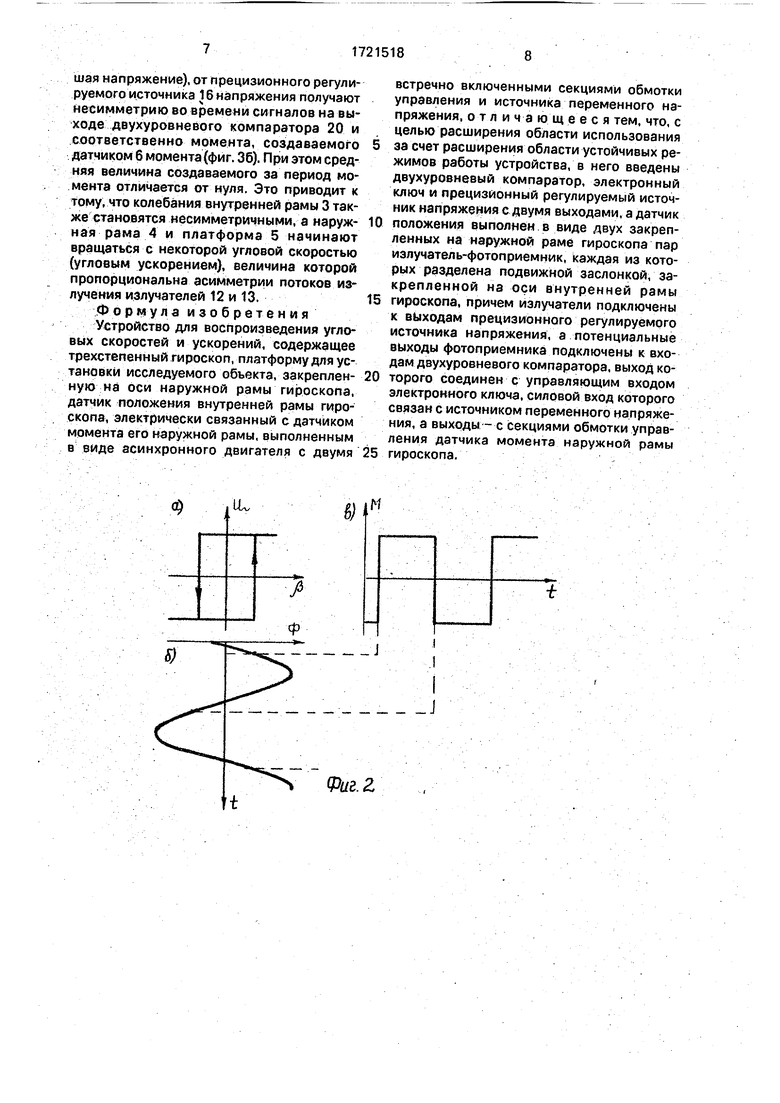
несимметрия колебаний внутренней рамы 3 путем несимметричного момента датчика 6. При этом средняя величина создаваемого за период момента отличается от нуля. Это приводит к тому, что колебания внутренней рамы 3 также становятся несимметричными, а наружная рама 4 и платформа 5 начинают вращаться с некоторой угловой скоростью (ускорением), величина которой пропорциональна асимметрии потоков излучения излучателей 12 и 13. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 1991 |
|
RU2015609C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 2011 |
|
RU2476826C1 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ УГЛОВОГО ДВИЖЕНИЯ | 2001 |
|
RU2206899C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2002 |
|
RU2224219C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА | 2014 |
|
RU2570229C1 |
| Устройство управления стабилизирующими моторами курсовертикали | 2022 |
|
RU2787311C1 |
| УГЛОВОЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2399915C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2002 |
|
RU2225024C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
Изобретение относится к приборостроению, в частности к измерительной технике, и может быть использовано для градуировки и поверки точных приборов в метрологии, точном приборостроении и навигации. Целью изобретения является расширение области использования устройства. Поставленная цель достигается тем, что датчик 11 положения внутренней рамы 3 карданного подвеса гидромотора 2, включенный в цепь управления датчиком 6 момента, установленным на оси наружной рамы кардана, образован двумя парами излучателей 12, 13 и фотоприемников 14, 15.- Излучатель и фото(Л С vi го СП со 9uA,i
Изобретение относится к приборостроению, в частности к измерительной технике, и может быть использовано для градуировки и поверки точных приборов в метрологии, точном приборостроении и навигации.
Известно устройство для испытания угловых акселерометров, содержащие двигатель с укрепленной на его валу платформой, преобразователь угла поворота платформы, последовательно включенные фазоинвер- тор, элемент с нелинейной статической характеристикой и фильтр нижних частот, при этом выход преобразователя угла поворота платформы соединен с входом фазоинвер- тора, а выход фильтра нижних частот - с входом двигателя 1.
Однако известное устройство имеет ограниченный частотный диапазон воспроизводимых гармонических колебаний, который определяется диапазоном частот автоколебаний жестко замкнутой системы регулирования, и ограниченную область применения.
Наиболее близким по технической сущности к предлагаемому является стенд для испытания приборов и узлов систем инер- циальной навигации и управления, который содержит трехстепенной гироскоп, платформу для установки исследуемого объекта, закрепленную на оси наружной рамы гироскопа, датчик положения внутренней рамы гироскопа, подключенный через усилительно-преобразовательный блок к датчику момента наружной рамы гироскопа, а также датчик момента внутренней рамы гироскопа, с помощью которого создается управляющее воздействие на гироскоп. Как правило, датчики моментов выполнены в виде двухфазных асинхронных двигателей с двумя встречно включенными секциями обмотки управления. Наличие управляющего воздействия обуславливает прецессионное движение наружной рамы гироскопа относительно ее оси. Изменение величины управляющего момента позволяет варьировать угловую скорость прецессии, т.е. угловую скорость движения платформы 2.
Однако использование в качестве задатчика угловой скорости датчика момента внутренней рамы создает определенные трудности в широком использовании устройства. Это объясняется тем, что оно имеет
области устойчивых режимов работы и области неустойчивости, что ограничивает возможности его использования.
Целью изобретения является расширение области использования устройства.
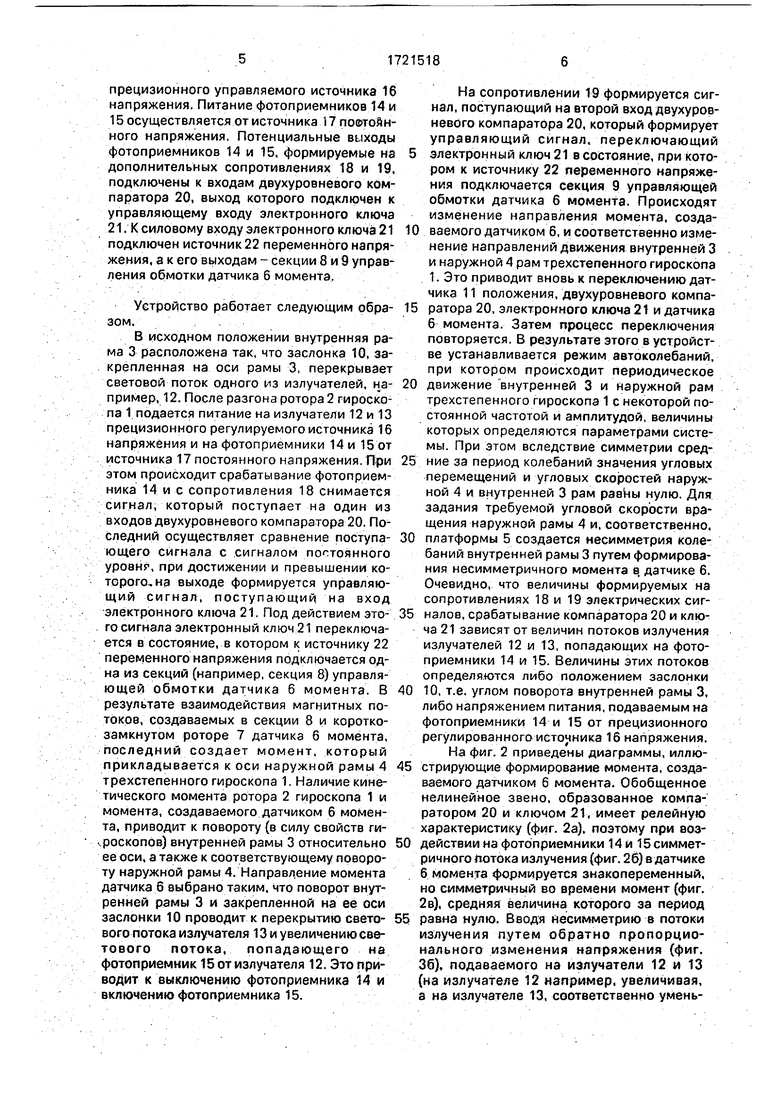
На фиг. 1 приведена электрокинематическая схема устройства; на фиг. 2 и 3 представлены для исходного и рабочего режима соответственно статическая характеристика обобщенного нелинейного элемента
(а), изменение во времени интенсивности потока излучения Ф(т.) для двух излучателей, работающих противофазно, (б) и диаграмма момент M(t), создаваемого датчиком момента. Устройство для воспроизведения угловых скоростей и ускорений содержит трехстепенный гироскоп 1, включающий ротор 2, внутреннюю 3 и наружную 4рамы. На оси наружной рамы 4 закреплены платформа 5, на которой устанавливается исследуемый объект, и с противоположной стороны датчик 6 момента, выполненный в виде двухфазного асинхронного двигателя с короткозамкнутым ротором 7. обмотка управления которого
имеет две встречно включенные секции 8 и 9. На оси внутренней рамы 3 закреплена подвижная заслонка 10 датчика 11 положения внутренней рамы 3. Датчик 11 положения образован двумя парами излучателей
12, 13 и фотоприемников 14, 15, при этом излучатель и фотоприемник в каждой паре разделены заслонкой 10. Излучатели 12 и 13 подключены к противофазным выходам
прецизионного управляемого источника 16 напряжения. Питание фотоприемников 14 и 15 осуществляется от источника 17 постоянного напряжения. Потенциальные выходы фотоприемников 14 и 15, формируемые на дополнительных сопротивлениях 18 и 19, подключены к входам двухуровневого компаратора 20, выход которого подключен к управляющему входу электронного ключа 21. К силовому входу электронного ключа 21 подключен источник 22 переменного напряжения, а к его выходам - секции 8 и 9 управления обмотки датчика 6 момента.
Устройство работает следующим образом..- В исходном положении внутренняя рама 3 расположена так, что заслонка 10, закрепленная на оси рамы 3, перекрывает световой поток одного из излучателей, например, 12. После разгона ротора 2 гироскопа 1 подается питание на излучатели 12 и 13 прецизионного регулируемого источника 16 напряжения и на фотоприемники 14 и 15 от источника 17 постоянного напряжения. Яри этом происходит срабатывание фотоприемника 14 и с сопротивления 18 снимается сигнал, который поступает на один из входов двухуровневого компаратора 20. Последний осуществляет сравнение поступающего сигнала с сигналом постоянного уровня, при достижении и превышении которого, на выходе формируется управляющий сигнал, поступающий, на вход электронного ключа 21. Под действием этого сигнала электронный ключ 21 переключается в состояние, в котором к источнику 22 переменного напряжения подключается одна из секций (например, секция 8) управляющей обмотки датчика 6 момента. В результате взаимодействия магнитных потоков, создаваемых в секции 8 и коротко- замкнутом роторе 7 датчика 6 момента, последний создает момент, который прикладывается к оси наружной рамы 4 трехстепенного гироскопа 1. Наличие кинетического момента ротора 2 гироскопа 1 и момента, создаваемого датчиком 6 момента, приводит к повороту (в силу свойств ги- чроскопОв) внутренней рамы 3 относительно ее оси, а также к соответствующему повороту наружной рамы 4. Направление момента датчика 6 выбрано таким, что поворот внутренней рамы 3 и закрепленной на ее оси заслонки 10 проводит к перекрытию светового потока излучателя 13 и увеличению еве- тового потока, попадающего на фотоприемник 15 от излучателя 1.2. Это приводит к выключению фотоприемника 14 и включению фотоприемника 15.
На сопротивлении 19 формируется сигнал, поступающий на второй вход двухуровневого компаратора 20, который формирует управляющий сигнал, переключающий 5 электронный ключ 21 в состояние, при котором к источнику 22 переменного напряжения подключается секция 9 управляющей обмотки датчика б момента. Происходят изменение направления момента, созда10 ваемого датчиком 6, и соответственно изменение направлений движения внутренней 3 и наружной 4 рам трехстепенного гироскопа 1. Это приводит вновь к переключению датчика 11 положения, двухуровневого компа5 ратора 20, электронного ключа 21 и датчика 6 момента. Затем процесс переключения повторяется. В результате этого в устройстве устанавливается режим автоколебаний, при котором происходит периодическое
0 движение внутренней 3 и наружной рам трехстепенного гироскопа 1 с некоторой постоянной частотой и амплитудой, величины которых определяются параметрами системы. При этом вследствие симметрии сред5 ние за период колебаний значения угловых перемещений и угловых скоростей наружной 4 и внутренней 3 рам равны нулю. Для задания требуемой угловой скорости вращения наружной рамы 4 и, соответственно.
0 платформы 5 создается несимметрия колебаний внутренней рамы 3 путем формирования несимметричного момента в датчике 6. Очевидно, что величины формируемых на сопротивлениях 18 и 19 электрических сиг5 налов, срабатывание компаратора 20 и ключа 21 зависят от величин потоков излучения излучателей 12 и 13, попадающих на фотоприемники 14 и 15. Величины этих потоков определяются либо положением заслонки
0 10, т.е. углом поворота внутренней рамы 3,
либо напряжением питания, подаваемым на
фотоприемники 14 и 15 от прецизионного
регулированного источника 16 напряжения.
На фиг. 2 приведены диаграммы, иллю5 стрирующие формирование момента, создаваемого датчиком 6 момента. Обобщенное нелинейное звено, образованное компаратором 20 и ключом 21, имеет релейную характеристику (фиг. 2а), поэтому при аоз0 действии на фотоприемники 14 и 15 симметричного потока излучения (фиг. 26) в датчике 6 момента формируется знакопеременный, но симметричный во времени момент (фиг. 2в), средняя величина которого за период
5 равна нулю. Вводя несимметрию в потоки излучения путем обратно пропорционального изменения напряжения (фиг. 36), подаваемого на излучатели 12 и 13 (на излучателе 12 например, увеличивая, а на излучателе 13, соответственно уменьшая напряжение), от прецизионного регулируемого источника 16 напряжения получают несимметрию во времени сигналов на выходе двухуровневого компаратора 20 и соответственно момента, создаваемого датчиком б момента (фиг. 36). При этом средняя величина создаваемого за период момента отличается от нуля. Это приводит к тому, что колебания внутренней рамы 3 также становятся несимметричными, а наруж- ная рама 4 и платформа 5 начинают вращаться с некоторой угловой скоростью (угловым ускорением), величина которой пропорциональна асимметрии потоков излучения излучателей 12 и 13. Ф о р м у лаизобретения Устройство для воспроизведения угловых скоростей и ускорений, содержащее трехстепенный гироскоп, платформу для установки исследуемого объекта, закреплен- ную на оси наружной рамы гироскопа, датчик положения внутренней рамы гироскопа, электрически связанный с датчиком момента его наружной рамы, выполненным в виде асинхронного двигателя с двумя
гг.j
Фиг. г
встречно включенными секциями обмотки управления и источника переменного напряжения, отличающееся тем, что, с целью расширения области использования за счет расширения области устойчивых режимов работы устройства, в него введены двухуровневый компаратор, электронный ключ и прецизионный регулируемый источник напряжения с двумя выходами, а датчик положения выполнен в виде двух закрепленных на наружной раме гироскопа пар излучатель-фотоприемник, каждая из которых разделена подвижной заслонкой, закрепленной на оси внутренней рамы гироскопа, причем излучатели подключены к выходам прецизионного регулируемого источника напряжения, а потенциальные выходы фотоприемника подключены к входам двухуровневого компаратора, выход которого соединен с управляющим входом электронного ключа, силовой вход которого связан с источником переменного напряжения, а выходы - с секциями обмотки управления датчика момента наружной рамы гироскопа.
1
i
J
6)
AM
Фиг. 5
| Устройство для испытания угловых акселерометров | 1980 |
|
SU1007023A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Чулкрва И.С., Павлов И.В | |||
| Стенд для испытания приборов и узлов систем инер- циальной навигации и управления | |||
| - Труды метрологических институтов СССР | |||
| Исследования в области измерения угловых параметров движения | |||
| Л., 1977, с, 10-14. | |||
