Изобретение относится к гироскопической технике и может найти применение при построении трехосных индикаторных и силовых гироскопических стабилизаторов, и в частности курсовертикалей.
Известно устройство управления стабилизирующими моторами курсовертикали, построенной по схеме трехосного силового гиростабилизатора (Автопилот АП-15 [Текст]: Техническое описание / Сост.: О.В. Успенский, Ю.С. Рыжов, М.Я. Фрейберг, Г. Ю. Полканов. - Москва: Оборонгиз, 1960. - 189 с). Курсовертикаль содержит платформу, помещенную в кардановый подвес, на которой расположены три двухстепенных гироблока, это азимутальный гироблок, автономно работающий на стабилизирующий мотор азимутальной оси стабилизации, первый и второй гироблоки, работающие совместно с использованием координатного преобразователя на первый и второй стабилизирующие моторы, расположенные на двух других осях подвеса платформы (осях карданового подвеса платформы). Устройство управления стабилизирующими моторами, размещенными на осях карданового подвеса платформы содержит: первый и второй датчики углов гироблоков, обмотки возбуждения которых соединены с соответствующими выходами двухфазного статора координатного преобразователя (в виде фазовращателя), установленного на азимутальной оси, трехфазный ротор которого подключен к трехфазному источнику питания. Сигнальные обмотки каждого датчика углов гироблоков соединены дифференциально, а между собой - последовательно и подключены на вход усилителя, к выходу которого подключены последовательно соединенные обмотки управления первого и второго стабилизирующих моторов, на обмотки возбуждения которых подаются напряжения сдвинутые друг относительно друга на 90 электрических градусов.
Недостатком устройства управления стабилизирующими моторами курсовертикали является конструктивная сложность, заключающаяся в наличии координатного преобразователя в виде фазовращателя на азимутальной оси и стабилизирующих моторов в виде двухфазных индукционных двигателей с редукторами, что к тому же снижает точность стабилизации.
Известен трехосный индикаторный гиростабилизатор телекамеры (Гиростабилизатор ГС-15М. Техническое описание, 1980), в котором устройство управления стабилизирующими моторами, установленными на осях карданового подвеса, принято за прототип.
На платформе гиростабилизатора, помещенной в кардановый подвес, установлены трехстепенной и двухстепенной гироскопы и объект стабилизации в виде телекамеры. Двухстепенной гироскоп участвует в стабилизации и управлении платформой вокруг азимутальной оси, на которой установлены стабилизирующий мотор, системный датчик утла и координатный преобразователь, выполненные в виде синусно-косинусных трансформаторов (СКТ)
В прототипе устройство управления стабилизирующими моторами, расположенными конструктивно по осям карданового подвеса, выполнено следующим образом. Первый и второй датчики углов трехстепенного гироскопа, расположенные на осях его подвеса, которые определяют оси платформы, подключены через предварительные усилители соответственно к первой и второй обмоткам ротора СКТ координатного преобразователя, статорные обмотки (синусная и косинусная) которого соединены с первым и вторым усилителями стабилизации, выходы которых подключены соответственно к первому и второму стабилизирующим моторам, расположенным на осях карданового подвеса платформы. При этом стабилизирующие моторы представляют собой моментные двигатели постоянного тока с возбуждением от постоянных магнитов и используются в безредуторном вариате.
Недостатком устройства управления стабилизирующими моторами трехосного индикаторного гиростабилизатора, принятого за прототип, является конструктивная сложность, заключающаяся в наличии координатного преобразователя, выполненного в виде СКТ.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в упрощении электромеханической части конструкции трехосного гиростабилизатора, которая состоит в исключении координатного преобразователя и замены его электронным аналогом, и повышении на основании этого точности стабилизации.
Технический результат достигается тем, что в устройстве управления стабилизирующими моторами трехосного гиростабилизатора, содержащим платформу, установленную азимутальной осью с закрепленным на ней системным датчиком угла в виде синусно-косинусного трансформатора в кардановый подвес, по осям которого установлены первый и второй стабилизирующие моторы, подключенные к выходам первого и второго усилителей стабилизации, и трехстепенной гироскоп, по осям подвеса которого установлены первый и второй датчики углов, а оси его ориентированными по осям платформы, на которой он установлен, новым является то, что выходы первого и второго датчиков угла трехстепенного гироскопа, а также выходы синусной и косинусной обмоток системного датчика угла через преобразователи аналог-код подключены соответственно на первый, второй, третий и четвертый входные порты микроконтроллера, два выходных порта которого через преобразователи код-аналог соединены с соответствующими входами первого и второго усилителей стабилизации первого и второго стабилизирующих моторов, управляющие напряжения которыми с учетом обработки в микроконтроллере формируются в соответствии с формулами
 ;
;
 ,
,
где  ,
, - напряжения первого и второго датчиков углов трехстепенного гироскопа;
- напряжения первого и второго датчиков углов трехстепенного гироскопа;  - напряжения синусной и косинусной обмоток азимутального системного датчиком угла;
- напряжения синусной и косинусной обмоток азимутального системного датчиком угла;  коэффициенты передачи преобразователей аналог-код и код-аналог, первого и второго усилителей стабилизации;
коэффициенты передачи преобразователей аналог-код и код-аналог, первого и второго усилителей стабилизации;  ,
,  - напряжения управления первым и вторым стабилизирующими моторами.
- напряжения управления первым и вторым стабилизирующими моторами.
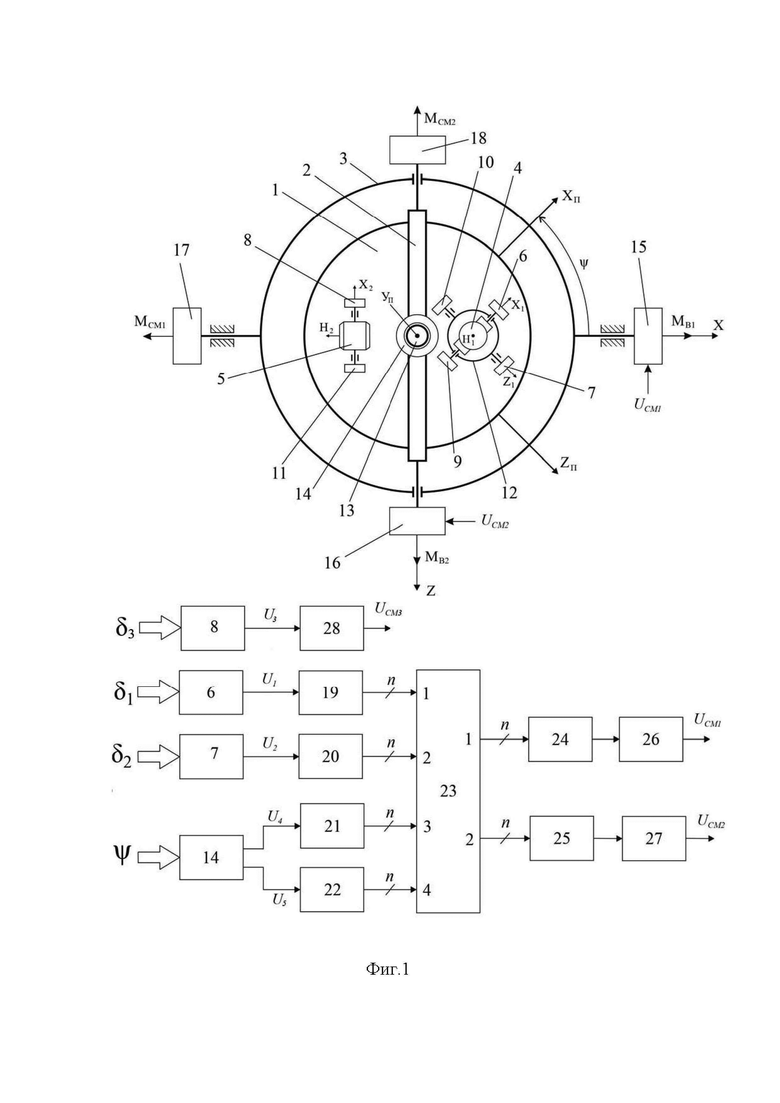
Сущность изобретения поясняется фиг.1, на которой приведена кинематическая схема гиростабилизатора с блок-схемой устройства управления стабилизирующими моторами.
Пояснения позиций и буквенных обозначений, приведенных на фиг.1.
1. Платформа.
2. Внутренняя рама.
3. Наружная рама.
4. Гироузел трехстепенного гироскопа.
5. Двухстепенной гироскоп.
6. Первый датчик угла.
7. Второй датчик угла.
8. Третий датчик угла.
9. Первый коррекционный мотор.
10. Второй коррекционный мотор.
11. Третий коррекционный мотор.
12. Рамка трехстепенного гироскопа.
13. Ротор системного азимутального датчика угла.
14. Статор системного азимутального датчика угла.
15. Первый стабилизирующий мотор.
16. Второй стабилизирующий мотор.
17. Системный датчик угла крена.
18. Системный датчик угла тангажа.
19. Первый преобразователь аналог-код.
20. Второй преобразователь аналог-код.
21. Третий преобразователь аналог-код.
22. Четвертый преобразователь аналог-код.
23. Микроконтроллер.
24. Первый преобразователь код-аналог.
25. Второй преобразователь код-аналог.
26. Первый усилитель стабилизации.
27. Второй усилитель стабилизации.
28. Третий усилитель стабилизации.
 оси платформы;
оси платформы;
 оси подвеса наружной и внутренней рам - оси карданового подвеса (оси стабилизации);
оси подвеса наружной и внутренней рам - оси карданового подвеса (оси стабилизации);
 оси подвеса трехстепенного гироскопа;
оси подвеса трехстепенного гироскопа;
 кинетические моменты гироскопов;
кинетические моменты гироскопов;
 углы отклонения трехстепенного гироскопа относительно осей
углы отклонения трехстепенного гироскопа относительно осей  соответственно;
соответственно;
 угол отклонения двухстепенного гироскопа;
угол отклонения двухстепенного гироскопа;
 угол между осями платформы и осями карданового подвеса;
угол между осями платформы и осями карданового подвеса;
 возмущающие моменты, действующие по осям карданового подвеса платформы;
возмущающие моменты, действующие по осям карданового подвеса платформы;
 моменты первого и второго стабилизирующих моторов;
моменты первого и второго стабилизирующих моторов;
 выходные напряжения первого и второго датчиков угла трехстепенного гироскопа;
выходные напряжения первого и второго датчиков угла трехстепенного гироскопа;
 выходное напряжение третьего датчика угла двухстепенного гироскопа;
выходное напряжение третьего датчика угла двухстепенного гироскопа;
 выходные напряжения синусной и косинусной обмоток системного азимутального датчика угла;
выходные напряжения синусной и косинусной обмоток системного азимутального датчика угла;
 управляющие напряжения первого и второго стабилизирующих моторов;
управляющие напряжения первого и второго стабилизирующих моторов;
 управляющее напряжение азимутального стабилизирующего мотора;
управляющее напряжение азимутального стабилизирующего мотора;
 разрядность цифрового кода.
разрядность цифрового кода.
Пояснение обозначений, которые встречаются в тесте:
 суммарная крутизна контуров стабилизации;
суммарная крутизна контуров стабилизации;
 коэффициенты передачи датчиков угла гироскопа, азимутального системного датчика угла, преобразователей аналог-код и код- аналог, усилителей контуров стабилизации, стабилизирующих моторов по напряжению;
коэффициенты передачи датчиков угла гироскопа, азимутального системного датчика угла, преобразователей аналог-код и код- аналог, усилителей контуров стабилизации, стабилизирующих моторов по напряжению;
 активное сопротивление обмотки якоря стабилизирующих моторов.
активное сопротивление обмотки якоря стабилизирующих моторов.
На фиг.1 представлены только те функциональные узлы, которые имеют отношение к построению устройства управления стабилизирующими моторами.
В соответствии с фиг.1, на которой изображена кинематическая схема со стороны азимутальной оси  и блок-схема устройства управления стабилизирующими моторами , трехосный гиростабилизатор построен по классической схеме, т.е. платформа 1 с закрепленными на ней гироскопами размещена в кардановом подвесе, состоящим из внутренней рамы 2 и наружной рама 3. Двухстепенной гироскоп 5 является чувствительным элементом азимутального канала стабилизации: сигнал
и блок-схема устройства управления стабилизирующими моторами , трехосный гиростабилизатор построен по классической схеме, т.е. платформа 1 с закрепленными на ней гироскопами размещена в кардановом подвесе, состоящим из внутренней рамы 2 и наружной рама 3. Двухстепенной гироскоп 5 является чувствительным элементом азимутального канала стабилизации: сигнал  с третьего датчика угла 8 через усилитель стабилизации 28 в виде напряжения
с третьего датчика угла 8 через усилитель стабилизации 28 в виде напряжения  поступает на азимутальный стабилизирующий мотор (условно не показан), расположенный на азимутальной оси
поступает на азимутальный стабилизирующий мотор (условно не показан), расположенный на азимутальной оси  . Для управления движением платформы вокруг оси служит третий коррекционный мотор 11. Азимутальный контур работает автономно и не является предметов предполагаемого изобретения и в дальнейшем не рассматривается.
. Для управления движением платформы вокруг оси служит третий коррекционный мотор 11. Азимутальный контур работает автономно и не является предметов предполагаемого изобретения и в дальнейшем не рассматривается.
Чувствительным элементом двух других каналов стабилизации является трехстепенной гироскоп, состоящий из гироузла 4, рамки 12, на осях подвеса  трехстепенного гироскопа соответственно установлены первый 6 и второй 7 датчики углов, и первый 9 и второй 10 коррекционные моторы, которые служат для управления положением платформы 1. Напряжения
трехстепенного гироскопа соответственно установлены первый 6 и второй 7 датчики углов, и первый 9 и второй 10 коррекционные моторы, которые служат для управления положением платформы 1. Напряжения  , зависящие от возмущающих моментов
, зависящие от возмущающих моментов  , с датчиков углов 6 и 7 подаются на преобразователи аналог-код 19 и 20 и далее в виде n разрядного параллельного кода поступают на первый и второй входные порты микроконтроллера 23.
, с датчиков углов 6 и 7 подаются на преобразователи аналог-код 19 и 20 и далее в виде n разрядного параллельного кода поступают на первый и второй входные порты микроконтроллера 23.
На азимутальной оси  установлен системный датчик азимутального угла, состоящий из ротора 13, закрепленного на азимутальной оси и статора 14, закрепленного на внутренней раме 2. В современной концепции построения авиационных систем это СКТ, и он два сигнала
установлен системный датчик азимутального угла, состоящий из ротора 13, закрепленного на азимутальной оси и статора 14, закрепленного на внутренней раме 2. В современной концепции построения авиационных систем это СКТ, и он два сигнала  , пропорциональные соответственно синусу и косинусу угла
, пропорциональные соответственно синусу и косинусу угла  . Если трехосный гиростабилизатор является курсовертикалью, то угол
. Если трехосный гиростабилизатор является курсовертикалью, то угол  называется гироскопическим курсом, и является углом между осями платформы
называется гироскопическим курсом, и является углом между осями платформы  и осями карданового подвеса
и осями карданового подвеса  , на которых установлены первый 15 и второй 16 стабилизирующие моторы, что обеспечивается конструктивно при выставке ротора 13 относительно статора 14 азимутального датчика при сборке. Оси платформы должны быть параллельны осям подвеса трехстепенного гироскопа. В случае курсовертикали системные датчики 17 и 18 будут соответственно датчиками улов крена и тангажа.
, на которых установлены первый 15 и второй 16 стабилизирующие моторы, что обеспечивается конструктивно при выставке ротора 13 относительно статора 14 азимутального датчика при сборке. Оси платформы должны быть параллельны осям подвеса трехстепенного гироскопа. В случае курсовертикали системные датчики 17 и 18 будут соответственно датчиками улов крена и тангажа.
Основным назначением устройства управления стабилизирующими моторами первым 15 и вторым 16 является сделать их работу независимой от азимутального угла , т.е., чтобы стабилизирующий мотор 15 компенсировал возмущающий момент  , а стабилизирующий мотор 16 компенсировал
, а стабилизирующий мотор 16 компенсировал  . Регулятором в прототипе являлся координатный преобразователь, в предполагаемом изобретении эту функцию выполняет системный датчик 13-14 и микроконтроллер.
. Регулятором в прототипе являлся координатный преобразователь, в предполагаемом изобретении эту функцию выполняет системный датчик 13-14 и микроконтроллер.
Рассмотрим последовательно работу устройства управления стабилизирующими моторами в установившемся режиме.
1. При произвольном угле возмущающие моменты, действующие по осям платформы, будут иметь вид
2. Платформа под действием этих моментов в силу основного свойства трехстепенного гироскопа сохранять направление вектора кинетического момента  в инерциальном пространстве в установившемся режиме отклонится на углы
в инерциальном пространстве в установившемся режиме отклонится на углы
3. На датчиках угла 15 и 16 сформируются напряжения
4. Выходные напряжения первого 6 и второго 7 датчиков угла  и
и  , пройдя преобразователи аналог-код 19 и 20 соответственно, через параллельные входные порты 1 и 2 поступают в микроконтроллер и записываются ячейки оперативной памяти.
, пройдя преобразователи аналог-код 19 и 20 соответственно, через параллельные входные порты 1 и 2 поступают в микроконтроллер и записываются ячейки оперативной памяти.
5. Выходные напряжения синусной  и косинусной
и косинусной  статорных обмоток системного азимутального датчика угла, пройдя преобразователи аналог-код 21 и 22 соответственно, через параллельные входные порты 3 и 4 поступают в микроконтроллер и записываются ячейки оперативной памяти.
статорных обмоток системного азимутального датчика угла, пройдя преобразователи аналог-код 21 и 22 соответственно, через параллельные входные порты 3 и 4 поступают в микроконтроллер и записываются ячейки оперативной памяти.
6. В микроконтроллере, который работает в реальном масштабе времени, происходит функциональное преобразование сигналов, поступивших через входные порты в соответствии с формулами
которые поступают на выходные порты 1 и 2, далее через преобразователи код-аналог 24 и 25 подаются на усилители стабилизации 26 и 27, на которых формируются управляющие напряжения стабилизирующими моторами первым 15 и вторым 16
Следовательно, управляющие напряжения первого и второго стабилизирующих моторов пропорциональны только тем моментам, которые действуют относительно данной оси стабилизации независимо от угла между осями стабилизации (осями карданового подвеса платформы).
7. Соответственно первый 15 и второй 16 стабилизирующие моторы, создадут моменты относительно осей подвеса определяемые формулами
Таким образом, упрощение конструкции трехосного гиростабилизатора состоит в том, что на азимутальной оси подвеса платформы вместо трех электромеханических элементов (системный датчик угла, стабилизирующий мотор, координатный преобразователь) будет остановлено два (системный датчик угла, стабилизирующий мотор). При этом роль координатного преобразователя будет осуществляться программно в микроконтроллере по сигналам системного датчика угла. Одновременно уменьшается количество коллекторных токоподводов, что тоже не мало важно для таких приборов. Кроме того микроконтроллер можно использовать для повышения точности работы путем калибровки.
Предлагаемое устройство управление стабилизирующими моторами можно применять для различных схем построения трехосных гиростабилизаторов: для индикаторных гиростабилизаторов с двумя трехстепенными гироскопами (ПГ-1В - платформа гироскопическая инерциальной системы И-11-76); для силовых гиростабилизаторов, у которых оси подвеса двухстепенных гироблоков могут быть как перпендикулярно, так и параллельно азимутальной оси подвеса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стабилизации гироскопической платформы | 2023 |
|
RU2826509C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| НАЗЕМНАЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА (ВАРИАНТЫ) | 2002 |
|
RU2213937C1 |
| Трехосный гиростабилизатор киноаппарата | 1981 |
|
SU979855A1 |
| Устройство измерения угла поворота летательного аппарата в горизонтальной плоскости | 2023 |
|
RU2805424C1 |
| Гироскопический стабилизатор с контуром управления усилием в опорах гироблока | 2022 |
|
RU2789307C1 |
| Способ определения азимута платформы трёхосного гиростабилизатора по измерению угла поворота одного из гироскопов | 2023 |
|
RU2841320C2 |
Изобретение относится к гироскопической технике и может найти применение при построении трехосных индикаторных и силовых гироскопических стабилизаторов, и в частности курсовертикалей. Устройство управления стабилизирующими моторами трехосного гиростабилизатора содержит платформу, установленную азимутальной осью с закрепленным на ней системным азимутальным датчиком угла в виде синусно-косинусного трансформатора в карданов подвес, по осям которого установлены первый и второй стабилизирующие моторы, подключенные к выходам первого и второго усилителей стабилизации, и трехстепенной гироскоп, по осям подвеса которого установлены первый и второй датчики углов. При этом оси трехстепенного гироскопа ориентированы по осям платформы, на которой он установлен. Выходы первого и второго датчиков угла трехстепенного гироскопа, а также выходы синусной и косинусной обмоток системного датчика угла через преобразователи аналог-код подключены соответственно на первый, второй, третий и четвертый входные порты микроконтроллера, два выходных порта которого через преобразователи код-аналог соединены с соответствующими входами первого и второго усилителей стабилизации первого и второго стабилизирующих моторов. Управляющие напряжения стабилизирующих моторов с учетом обработки в микроконтроллере формируются в соответствии с заданными формулами. Технический результат – упрощение электромеханической части конструкции трехосного гиростабилизатора и повышение точности стабилизации. 1 ил.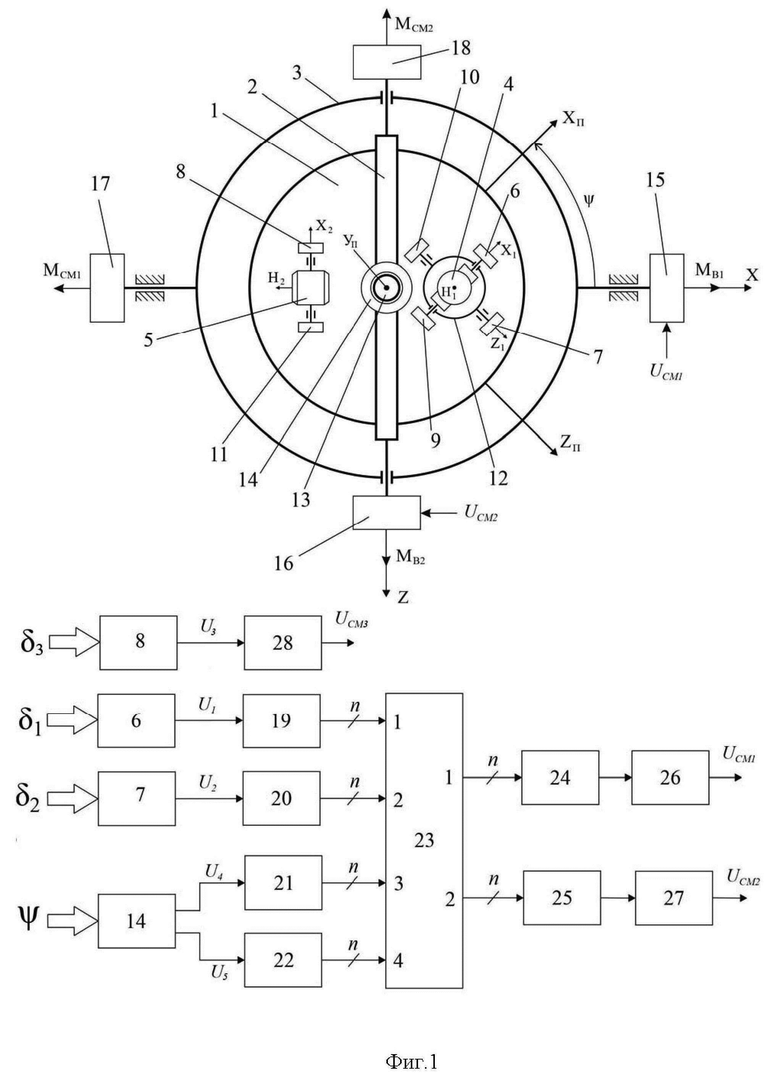
Устройство управления стабилизирующими моторами трехосного гиростабилизатора, содержащее платформу, установленную азимутальной осью с закрепленным на ней системным азимутальным датчиком угла в виде синусно-косинусного трансформатора в карданов подвес, по осям которого установлены первый и второй стабилизирующие моторы, подключенные к выходам первого и второго усилителей стабилизации, и трехстепенной гироскоп, по осям подвеса которого установлены первый и второй датчики углов, а оси его ориентированы по осям платформы, на которой он установлен, отличающееся тем, что выходы первого и второго датчиков угла трехстепенного гироскопа, а также выходы синусной и косинусной обмоток системного датчика угла через преобразователи аналог-код подключены соответственно на первый, второй, третий и четвертый входные порты микроконтроллера, два выходных порта которого через преобразователи код-аналог соединены с соответствующими входами первого и второго усилителей стабилизации первого и второго стабилизирующих моторов, управляющие напряжения которыми с учетом обработки в микроконтроллере формируются в соответствии с формулами
 ;
;
 ,
,
где  ,
,  – напряжения первого и второго датчиков углов трехстепенного гироскопа;
– напряжения первого и второго датчиков углов трехстепенного гироскопа;  – напряжения синусной и косинусной обмоток азимутального системного датчиком угла;
– напряжения синусной и косинусной обмоток азимутального системного датчиком угла;  коэффициенты передачи преобразователей аналог-код и код-аналог первого и второго усилителей стабилизации;
коэффициенты передачи преобразователей аналог-код и код-аналог первого и второго усилителей стабилизации;  ,
,  – напряжения управления первым и вторым стабилизирующими моторами.
– напряжения управления первым и вторым стабилизирующими моторами.
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| Способ посола мяса, шкур и т.д. | 1954 |
|
SU101174A1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| US 8899166 B2, 02.12.2014. | |||

