Изобретение относится к электроизмерительной технике и предназначено для измерения частоты синусоидальных сигналов в диапазоне низких и инфранизких частот.
Цель изобретения - упрощение процесса измерений и уменьшение времени измерений.
На фиг. 1 приведена структурная схема устройства, иллюстрирующая техническую реализацию предлагаемого способа; на фиг. 2 - блок-схема алгоритма выполнения вычислительных операций.
Получим аналитические соотношения, описывающие предлагаемый способ.
Пусть сигнал U(t), частоту которого необходимо измерить, представляет сумму гармонического сигнала и помехи:
U(t) A sin ( fl t+ V )+ Ј W:
где А, а) ; j) соответственно амплитуда, круговая частота и начальная фаза гармонического сигнала;
Ј (t)-аддитивная помеха, присутствующая в исследуемом гармоническом сигнале. К этой помехе отнесем не только составляющую, вызываемую внешними наводками, но и составляющую, обусловленную инструментальными погрешностями, приведенными к входу устройства (или прибора).
Представим это выражение в следующем виде:
U(t) Ax sin со t+ Ay cos a) t+ Ј (t). (1)
VI
NO
vf „«a
VI
где Ах Acos V; Ау V ортогональные (синфазная и квадратурная) составляющие амплитуды синусоидального сигнала.
Обозначим Ах, Ay, ft) оценки параметров Ах, Ау, со гармонического сигнала. .
Постановка задачи предлагаемого способа: измерить оптимальные оценки параметров Ах, Ау, со , т.е. оценки, имеющие наименьшую дисперсию погрешности, вносимой, помехой Ј (т.), непосредственно по временной реализации сигнала U(t) длительностью Т, Отличие постановки задачи изменения предлагаемым способом от постановки задачи прототипа состоит в том. что результат измерения (оценки параметров А, т ) получают путем однократной обработки реализации сигнала U(t)3a время измерения Т, в то время как в прототипе требуется многократная обработка либо последовательно воспроизводимых реализаций сигнала U(t) на, интервале длительностью Т, либо предварительно запомненных мгновенных значений одной реализации сигнала U(t) на этом временном интервале. . . .
Получим аналитические соотношения, описывающие последовательность операций над измерительным сигналом U.(t) в предлагаемом способе. Эти же соотношения представляют, согласно ГОСТ 8.009-84, Функцию преобразования(илиградуировоч- ную характеристику) устройства, реализующего предлагаемый способ.А А
Оптимальные оценки параметров Ах, Ау ю, сигнала U(t) находим, как и в прототипе, из известного условия минимума дисперсии погрешности, вносимой помехой Ј (t):
е 1/Т / U(tj-Axsin со t-Ay cos со tJ2dt(2)
-Т/2
где Ј - дисперсия погрешности, обусловленной помехой Ј (t).; Задачу решим в два этапа: 1) определим оптимальные оценки параметров Ах, Ау измерительного сигнала U(t), а по ним найдем уравнение для определения оценки частоты со ; 2) определим оптимальную оценку частоты (О. : АЛ
Оптимальные оценки параметров А. Ау находим из условия минимума величины Ј , которому соответствуют следующие два уравнения:
-Ј$- -1 - / U(t)-Ax. sin -at t-Ауд
О MY -г /о
Т/2
tcos h t sin ft) tdt 0 ,
(3)
ар) Т/2 л А
-f4/Su(t)Ax sln t Ay i
cos со tjsln со tdt 0(4) Решая уравнения (3), (4), находим AxOs/(S,S); (C,€);
т/2
Us 1/Т / U(t).sln a) tdt; -т/г
10 где
15
Т/2л
Uc- 1/Т / U(t).cos & tdt ;(6)
-Т/2
АЛ
Т/2
20 Ag(S, S) 1/Т / sin2 со tdt;
-Т/2; :
Я с(С, 6) 1/Т / cos2 со tdt ; (7)
....-т/2 :
П р и меч а н и е. В прототипе соотношения (5) были подставлены в формулу (2), что привело к выражению
1 Т/2 о 1 г , ,2
U .yi .-.
s T;T 2u2Wdt-i%.которое и положено в основу известного принятбго за прототип способа. Это соотношение определяет состав и последовательность операций для измерения оценки частоты со сигнала U(t). Суть
способа сводится к тому, что, перестраивая
-А . Л :
частоту со , находят то ее значение соо, которое обеспечивает ДУ f Очевидно, при таком способе требуется многократное определение (для каждого нового значения
со ) величин Us и Uf по соотношениям (6), а также величин (S, S) и (С, С), что понижает быстродействие измерений, усложняет и процесс измерений, и устройство, реализующее способ, а также понижает достоверность измерений из-за повышения вероятности сбоев при многократной обработке измерительной-информации;
В отличие от этого вАпредлагаемом способе оценка частоты со определяется непосредственно по одной реализации сигнала U(t). что приводит к существенным отличительным признакам предлагаемого способа. Получим аналитические соотношения, описывающие предлагаемый способ.
Величина к с учетом выражения (является, с точностью до помехи, известной функцией действительного значения частоты т и его оценки ш , т.е. к х( О) а), ). Естественно, производная
( дЕ/дсо ) у( ) также является функцией величины со , со . Минимум величины Ј (со ,со ) или обращение в нуль величины у( со , ш ) достигается при &- о. Поэтому в принципе в области моно- тонкости функций е (со, со) или у( со,
ш ) (т.е. однозначности обратной функции) значение частоты со может быть найдено по одному единственному значению функций s (со ,со) илиу(о , со ) для одного единственногс значения частоты ш . Однако понятно , что использование функции у( со,
(Ъ ) удобнее по двум причинам: 1) в области минимума (при.--со со ) функция Ј ( со , со ). немонотонна, а функция у( со , со } монотонна. Поэтому использование функции е ( со ,й ) позволяет определить тол ько модуль ( со - со ) (так как обратная функция двузначна); 2) при использовании функции Ј ( со , со ) возникает системати- ческая погрешность, так как при со со величина Ј rriin 0, Она имеет некоторое значение, зависящее от помехи:
Т/2
Ј mirv-i./T / Ј dt
- Т/2
которое и приводит к систематической погрешности, определяемой математическим
- . Т/2 ,
ожиданием Ј min 1/T J dt
-т/2
2 . При использовании функции у( со , со ) математическое ожидание погрешности равно нулю.
В связи с вышеизложенным вычислим функцию у( со , $ ). Дифференцируя выражение (2.), получим
. . Яс -. :
S-lJ w-UAiAgcasit
x(A3smcc,l-AIcoso it)tdt
(8)
Преобразуем данное соотношение
о т|г fla tO.Qbf Aj U(t)smQl-idt-| A, UMcceUt-yt- 50
TO
-vl
Ttt
Js ncotcosQt-tJl -A« j sinatcosul-idt.
-Ttt.-T72
Запишем это выражение в следующем иде:
55
Г/2
gs 1 /T J U(t).sin w ttdt:
- Т /2
T/2 Л
gc 1 /T / U(t)cos ro ttdt:
-T/2
л л
Т/2
(tCS) 1/T / sin w tcos м t.tdt (11)
-Т/2
Таким образом, для определения величины yt со , со ) нужно, задавшись временем измерения Т и оценкой частоты со , измерить величины UsA Uc. gs, gc и вычислить величины (S, §), (С, б). (tSC). Этим исчерпываются операции с входным сигналом и завершается первый этап решения поставленной задачи.
Переходим ко второму этапу решения задачи, который заключается в определении действительного значения частоты со по;величине у( со, и) ).
Подставим равенство (1) в формулу (8):
m
(u,oi) A ntol«A-jCos i),S iujt TBi-AuCos-utj s mat-Aj.cosatltat.
Выразим действительнь1елзначения величин Ах, Ay с их оценками Ях, Ау с помощью соотношений (5), получим
|г (Й1 т
iu ts л д..-.
s4itoWt«.-A,+7IE
(55) :
А(21ГсШ i A s mcot4V03Qi
(Й)5 Т/2
(14)
где (S S). 1/Т / sin ш t.sln w tdt;
-Т/2 лТ/2
(СС) 1/Т / cos ft t.cos Q) tdti(15)
-т/2
« , . , .Ttt - i и.. t i
Гв-i fe4J WeoeuUl.
-ТЦ-П2. (1Ь)

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой частотомер | 1990 |
|
SU1765779A1 |
| Способ определения характеристик гармонического сигнала | 1990 |
|
SU1760470A1 |
| Устройство для измерения параметров амплитудно-модулированных сигналов | 1989 |
|
SU1756837A1 |
| Устройство для измерения параметров пассивного комплексного двухполюсника | 1983 |
|
SU1244598A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| Способ определения разности фаз СВЧ-сигналов и устройство для его осуществления | 1987 |
|
SU1465808A1 |
| Цифровой фазометр | 1981 |
|
SU987534A2 |
| Способ управления вентильным преобразователем | 1990 |
|
SU1739457A1 |
| Устройство для измерения тока короткого замыкания | 1991 |
|
SU1798805A1 |
| Цифровой анализатор спектра | 1990 |
|
SU1777096A1 |
Изобретение относится к электроизмерительной технике и предназначено для измерения частоты синусоидальных сигналов в диапазоне низких и инфранизких частот. Способ измерения частоты синусоидальных сигналов заключается в формировании двух опорных ортогональных синусоидальных сигналов по заданному значению частоты, перемножении этих сигналов с исследуемым сигналом и измерении двух средних значений полученных произведений сигналов, отличающийся тем, что, с целью упрощения процесса измерений и уменьшения времени измерений, формируют линейно изменяющийся сигнал в функции времени, умножают этот сигнал на каждый из двух сигналов произведений исследуемого сигнала и опорных сигналов, измеряют два средних значения произведений трех сигналов и находят результат измерения частоты f из решения уравнения: #( а-)/Лс ui +%. (a )/As ui 2/т (Us gc/As - uc as/Ас. где U(t) - исследуемый сигнал; U 0 (t) КТ - линейно изменяющийся сигнал с крутизной К; sin a) t, cos a) t - опорные сигналы; Т - заданное значение частоты; ш - измеренное значение частоты (результат измерения); о) - время измерения. 2 ил. СЛ
2 л, ,2v
A A
у(ш ш ,H Aygs-AxgcW-A/XtS%(9) где обозначено
Подставим соотношения (13), (14) в формулу (12), которую представим в следующем виде:
71798717 8
у( а) , а) ) уо( О) , ft) )+ 77,О) Вычислим величины, входящие в урэв
нения (22) и (23):
где rj - погрешйость в величине у(ш ,&)т 2 . . ,.
обусловленная помехой Ј (t). Л5 (54)4 J г тсоЫЬ 15 1 ; Найдем величины уо ( о , ш)лц в.ч (CO-COIT выражении (17):
u с,, Л М гсМ, - 5in(ca bani2. i; . e - te - «rt}V gj««t. 1Q (co.T 5 624)
-cosutJA s mut-A.eoeatHJt4S H i f)(-(ac,A (18) . .
Cco)- eo6fotco5(otdi« Аут
у 1В Tf7
.-ч-здш- ; 2 -4 v f««-i M4 -iS i (25)
(19) где 20 /
Tf2. . TI71 T|0 ц
( smwtcoscotldl; (Iscbi-UinatojeatiJt}. f о A.. sinCOT ,n,.
-12TA (ss)f-JSinC°t l o 2ST
(20)-TK
TI2 Til 25 T|2. . V .
ts4| iTW-sinalft} tc4UWcoSit.-tJt..-l.. (2V)
-Tfz-т Т J i. 2.СД1
-T.i
(21)тгя 3 .
Если помеха- (i) центрирована, т.е. ее30 Usc)f J - -coecot-tdt.- gj (cc
математическое ожидание Ј (t) 0, то, Т(а д
как следует выражений (16) и Q1)(ьа-Ц) cos(co-a))Tl2: sin(,(xn-ca№
. s Ј ts §t., a ()4T + i(w-cbV + (
следовательно, 0, что уже отмена-,
лось выше. (са+саУПй... (2В)
Из условия2(Qi-CO)
TI2.
vo(o, й)-у(о,):(t l- I wtcoeat A.ts,подставляя в него соотношения (9) и (18), 4 т д д
получим уравнение для определения часто- sm(w.-G3)T|2 cos (со - оз)Ш si n (ьа-ьц-)т(2 :
ты со :(ca-cb)T 2(со-сэ) (ea +
С05(СО + ЦЩ2 ., Г |
fcccl... . tl...ij-z rfss. ., ,,л,,-|}г45 (WtU
rat9cbMA4-fellec1-(tscuA«- m, . Л «
j . ,« ,. , . r , , Ai i u бшсоТ cosQT
J 5mQtCOSWt-t i -- --:----x--V
-TI2.
(30)
50 Обозначим для сокращения записей
i.f. n
ИАИ(Й-(аЧ-Й)(. ..
- (23)2 -2-°
Определение частоты ш сводится к 55Тогда выражения (24)-(30) принимают
решению уравнения (22) или (23), котороеВИА: fsin(ut-oC0 sinC -i-oto1)
может быть выполнено известными метода- v5S) -ot- ОС --г----- j (3t)
ми, например с помощью микропроцессора.. ° й
, , s m(oU(Q1 11 . + .ou. j ®°
(5Sb-M -S nZ X°b 55) l1 2ot0 p
(33)
smtoUoU .,35J Coi + otof 66 + ot0 j
ftaAl (бг.- COSU- tt5Cl T tOi-Oiof 6in() C05(bi-Ks6011
/ад)
..д.. тГб ш р СОб2 Ыо1
и5с1в 11ает пг1лз)
После подстановки выражений (31)-(36) в формулу (23),получим окончательное уравнение для определения частоты а) (т.е. величины а со Т/2, откуда У 2 а/Т):
%«W, i Mcd „г 2 /ЬЦс Ucis
где
6m(tt-«t) oosCtt-Di sin() соз(
(ti-ci., й-,, (ctfct.it гтгг
Sin() | 8in( tf-rfaР(в(в
J
0s;
«ttttlSlnCct-,,) coa(oi.-.1 smleitet) -. (ct.f
sin(oi-otc1 5 in(o + eЈj
0(-Cli0tt + Oto
. л .i
V1 -2 TC4i
Если ввести обозначения х а / a0 , то формулы (39), (40) несколько упростятся
Is(x)
J fsintx-Oot-o Sin()Kol
.«. . tX4Q J-
Sin (Х-ПК, J sirvr lTЈ; Xt
CQS(X-I)U;C tco5(y4-(1o ХП
X-l
(43)
Уравнение (38) совместно с формулами (6) для величин Us и Uc, (10) для величин gs
и дс, (39), (40) или (42), (43) для величин % i(x) и #2(х), а также (41).для величин A in Я 2 определяют существо предлагаемого способа, а следовательно, и необходимые операции для измерения частоты измерительного
сигнала U(t). Сводятся они к следующему: формируют два опорных ортогональных сигнала sin ш t и cos w по заданному значению частоты ш ; перемножают сигнал U(t) с опорными сигналами sin иг t и cos w Ц
измеряют средние значения произведений сигналов U(t)sin ft) t и U(t)cos ш t за время Т; и получают величины Us и Uc согласно выражениям (6); формируют линейно изменяющийся сигнал Uo(t) в функции времени t,
причем Uo(t)KT, где К - крутизна линейно изменяющегося сигнала; перемножают сигналы U(t)sin u t и U(t)cos ft) t на сигнал Uo(t) линейной функции времени t; измеряют средние значения произведений сигналов
U(t)Uo(t) u) t.t и U(t)Uo(t)cos wt.t и получают величины gs и дс согласно выражениям
(10)с учетом равенства т ; вычисляют
числовые коэффициенты А 1 и А г по фор- мулам (41); решают уравнение (38) и находят величину а со Т/2, а следовательно, результат измерения частоты со 2 а /Т.
Операции 1, 2, 3,7 присущи и противопоставленному способу, а операции 4, 5, б,
8 являются новыми и отнесены к существенным отличительным признакам предлагаемого способа.
Способ может быть реализован как в аналоговой, так и в цифровой форме; Более эффективной является цифровая обработка, позволяющая в полной мере использовать возможности микропроцессорной техники. В этом случае аналитические соотношения (6), (10) принимают вид:
п -1Л
Us 1/П Ј Щ Sin (У tq;
q o
n - 1Л
Uc 1/п 2 Uq cos to tq;(44)
q o
Л I A
95 1/n Uq Sin () tqUoql q o
n - 1л
gc 1/nX Uq COS (i tqUoq I (45) q o
Где Uq U(tq), Uoq Uo(t q) - ОТСЧ6ТЫ МГНОВ6Нных значений сигналов соответственно U(t) и Uo(t) в моменты времени tq;
n - число отсчетов за время измерений Т, причем Д t;
At- интервал (или период, или шаг) дискретизации.
Реализация способа может быть осуществлена устройством, выполненным полностью по той же схеме. Изменится только алгоритм и программа вычислений.
Однако более рациональным является выполнение устройства на основе современных однокристальных микроЭВМ, например типа КР1816ВЕ39 или КР1816ВЕ49.
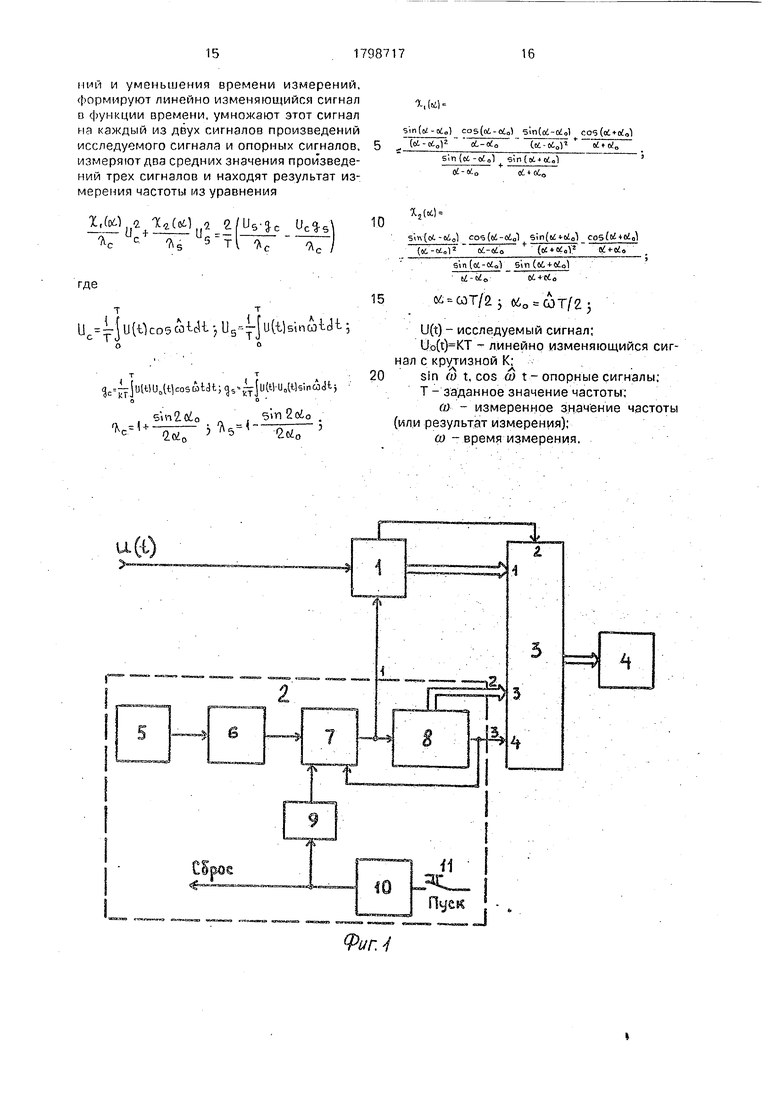
Структурная схема устройства приведена на фиг, 1.
Устройство содержит аналого-цифро- вой преобразователь (АЦП) .1, блок 2 управления, микропроцессорный вычислительЗ и блок 4 индикации.
Вход устройства подключен к первому, сигнальному, входу АЦП 1, второй вход, вход запуска которого соединен с первым выходом блока 2 управления. Первый, информационный или кодовый, выход АЦП 1 подключен к первому, информационному, входу микропроцессорного вычислителя 3, а второй выход, выход Конец преобразования, АЦП 1 - к второму входу, входу записи микропроцессорного вычислителя 3,третий адресный вход и четвертый вход, вход управления которого соединены соответственно с вторым и третьим выходами блока 2
управления. К выходу микропроцессорного
вычислителя 3 подключен блок 4 индикации.
Блок 2 управления включает генератор
5 тактов, делитель б частоты, электронный
ключ 7, счетчик 8, элемент 9 задержки, формирователь 10 импульса и кнопку 11 Пуск. Генератор 5 тактов через делитель 6 частоты соединен с первым, сигнальным, входом электронного ключа 7, первый.
0 управляющий вход которого подключен через последовательно соединенные элемент 9 задержки и формирователь 10 импульса к кнопке 11 Пуск, а третий управляющий вход электронного ключа 7 подключен к вто5 рому выходу счетчика 8, который служит третьим выходом блока 2 управления. Выход электронного ключа 7 соединен с первым выходом блока 1 управления и входом счетчика 8. первый кодовый выход которого
0 является вторым выходом блока 2 управления.
Микропроцессорный вычислитель 3 выполнен по стандартной архитектуре и для него имеются хорошо разработанные стан5 дартные подпрограммы.
В принципе вычислитель 3 может быть реализован на базе микро-ЭВМ любого типа, у которой осуществляется прямой доступ к памяти. Необходимость такой
0 организации вычислителя 3 объясняется тем, что процесс формирования кодов мгновенных значений и их обработка произв о- дятся с различной тактовой частотой, . Устройство работает следующим обра5 зом.
Входной сигнал U(t), частота которого измеряется, поступает на первый, сигналь- ный.вход АЦП 1, который находится в ждущем режиме.
0 При нажатии кнопки 11 Пуск в блоке 2 управления на выходе формирователя 10 импульса генерируется импульс, который поступает, во-первых, по шине сброса (на схеме цепи сброса не показаны) на устано.в5 ку в исходное состояние микропроцессорного вычислителя 3, блока 4 индикации и счетчика 8 выборок, а во-вторых, через элемент 9 задержки на второй вход электронного ключа 7, открывая его для прохождения
0 тактовых импульсов с выхода делителя 6 частоты, который служит для задания частоты или периода дискретизации путем деления постоянной частоты с выхода генератора 5 тактов на определенный коэф5 фициент деления, задаваемый в делителе 6. Тактовые импульсы с выхода электронного ключа 7 подаются на второй вход, вход запуска. АЦП 1. определяя моменты дискретизации tq входного сигнала U(t). В эти моменты времени АЦП 1 переводится в рабочий режим, режим преобразования, и на его первом.,информационном(выходе образуются коды или отсчеты мгновенных.значе- ний напряжения U(tq) Н Uq. По сигналу Конец преобразования, поступающему со второго выхода АЦП 1 на второй вход, вход записи микропроцессорного вычислителя 3. коды Uq по первому входу микропроцессорного вычислителя записываются в его ОЗУ. Адреса ОЗУ задаются кодом с первого кодового выхода счетчика 8, на вход которого поступают для подсчета импульсы запуска АЦП 1 с выхода электронного ключа 7. Код адреса поступает по второму выходу блока 2 управления на третий адресный вход микропроцессорного вычислителя 3. Счетчик 8 может быть выполнен как вычитающим, так и суммирующим. В первом случае в исходном состоянии в него записывается число п на вычитание, во втором случае - число (21-п), где С-разрядность счетчика. При выполнении п запусков АЦП 1, т.е. при получении п кодов мгновенных значений Uq, на втором выходе счётчика 8 появляется сигнал обнуления, который подается на третий вход электронного ключа 7, закрывая его для прохождения тактовых импульсрв.зэпу- ска. и по третьему выходу блока 2 управления на четвертый вход микропроцессорного вычислителя 3, с которого снимается запрещающий сигнал, и он переводится в режим вычислений.
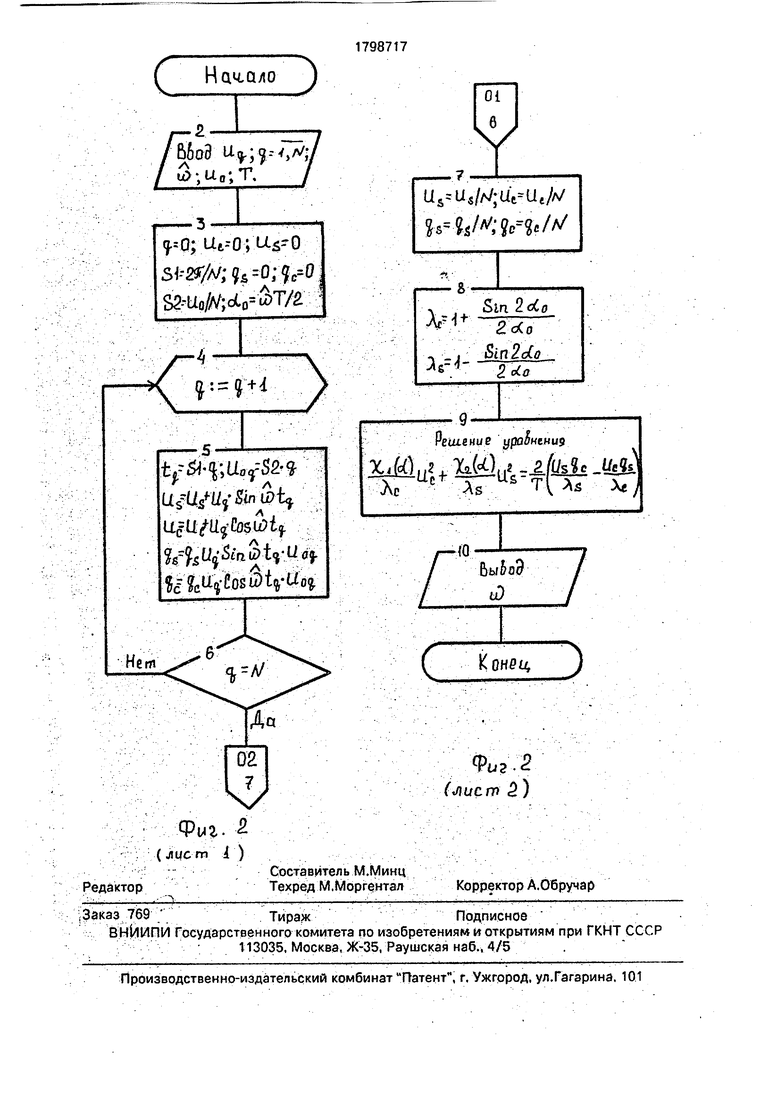
На этом завершается первый этап измерения, на котором получают коды мгновенных значений напряжения Uq, и начинается второй вычислительный этап работы устройства. Цифровая обработка введенных в микропроцессорный вычислитель 3 данных (кодов Uq) осуществляется в следующем порядке:л
- по заданному значению частоты а) вычисляются значения sin wtncos y 1(как и в прототипе) и записываются в ОЗУ вычислителя 3. Частота о может вводиться либо клавишным устройством (на схеме не показано), либо устройством автоматического выбора предела измерений, которые для частотомеров достаточно хорошо разработаны и используются во всех современных электронно-счетных частотомерах;
- определяют величины Us и Uc по формулам (44);
-находят величины gs и дс по формулам (45), при этом коды t q заранее записываются в ПЗУ вычислителя 3;
- вычисляют величины Яти А 2 по формулам (41);
- решают уравнение (38) относительно величины а , по которому находят результат измерения а) или f. отображаемый блоком 4 индикации.
Блок-схема алгоритма вычислений, выполняемых микропроцессорным вычислите- лем 3, приведена на фиг. 2.
Использование предлагаемого изобретения обеспечивает следующие технико- экономические преимущества.
0 весь цикл измерений полностью повторяется и необходимо воспроизведение сигнала U(t) на каждом интервале измерения. При цифровой реализации способа выигрыш получается только за счет вычислительной
5 процедуры, которая в предлагаемом способе получается за один цикл вычислений, а в прототипе- путем многократной обработки.
Достоверность достижения цели изо0 бретения подтверждается приведенными выше теоретическими выкладками и моделированием на ЭВМ.
Таким образом, использование предлагаемого изобретения при создании измери5 тельных средств для измерения частоты гармонических сигналов при наличии помех позволяет упростить процесс измерений, а следовательно, повысить надежность и достоверность измерений, а также уменьшить
0 время измерений,
Ф о р м у л а и з о б р е т е н и я Способ измерения частоты синусоидальных сигналов, заключающийся в формировании даух опорных ортогональных
5 синусоидальных сигналов по заданному значению частоты, перемножении этих сигналов с исследуемым сигналом и измерении двух средних значений полученных произведений сигналов, отличающийся тем, что, с целью повышения процесса измерений и уменьшения времени измерений, формируют линейно изменяющийся сигнал в функции времени, умножают этот сигнал на каждый из двух сигналов произведений
исследуемого сигнала и опорных сигналов, измеряют два средних значения произведений трех сигналов и находят результат измерения частоты из уравнения
I,M а /ЫоО a e(U5.Jc
-, - - ------
Ъ5 5 ri дс
где
тт U juWcoswUtjUs- -juWsinuUt;
Т
Зе |УиНШ.ЩсозиШ;gs-ifjuW-u.WsinMJt}
2oio . Zcio
Фи г. 4
eos(u,-oUl 5Jn(od-ulo1 соб(сЈ + .
Ы-в6в1г
,,
2
s;n(et-odal sin (Л-к..
%2(«t)
.-iiiol eos(et-cO C05( ( + ( tf -cto . ein(ct-ctoV (66 +ftdol li-btoCi+ Cte
.« coT/2 060 001725
U.(t) - исследуемый сигнал; Uo(t)KT - линейно изменяющийся сигнал с крутизной К;
sin to t. cos a) t - опорные сигналы; Т-заданное значение частоты;
О) - измеренное значение частоты (или результат измерения); со - время измерения.
Г 2-----ГГ-7
/Bio3-%.r-v,W / &;Un;T. /
.$-о 9s -о; o,
T-1----
;-fr-tef--,. /
1798717
01
т
Ue Ue// Ue Ue-/A/ }e4«Mjrfc/A
Sln.2.flCg
г:с(р
V
Решение
кениэ
| Устройство для измерения характеристик синусоидального сигнала | 1985 |
|
SU1307366A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
