Изобретение относится к электротехнике и может быть использовано для управления регулируемыми преобразователями, питающими системы частотно-регулируемого электропривода.
Целью изобретения является линеаризация регулировочной характеристики преобразователя при изменяемой величине амплитуды питающего напряжения.
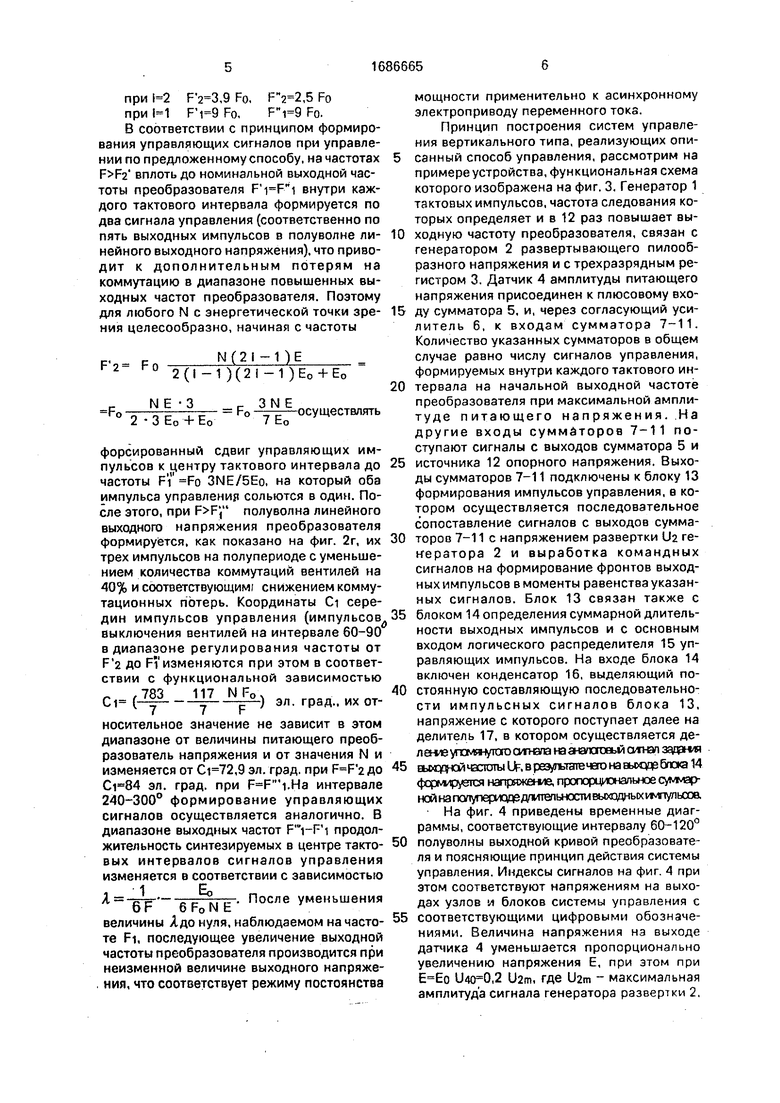
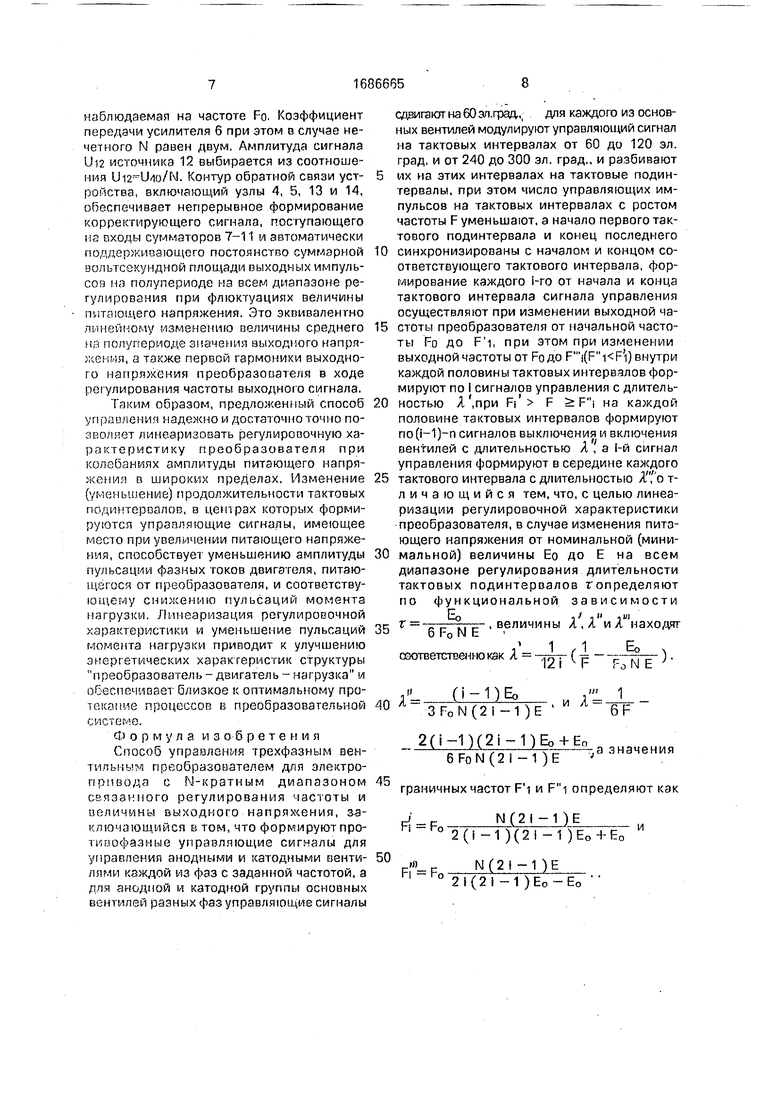
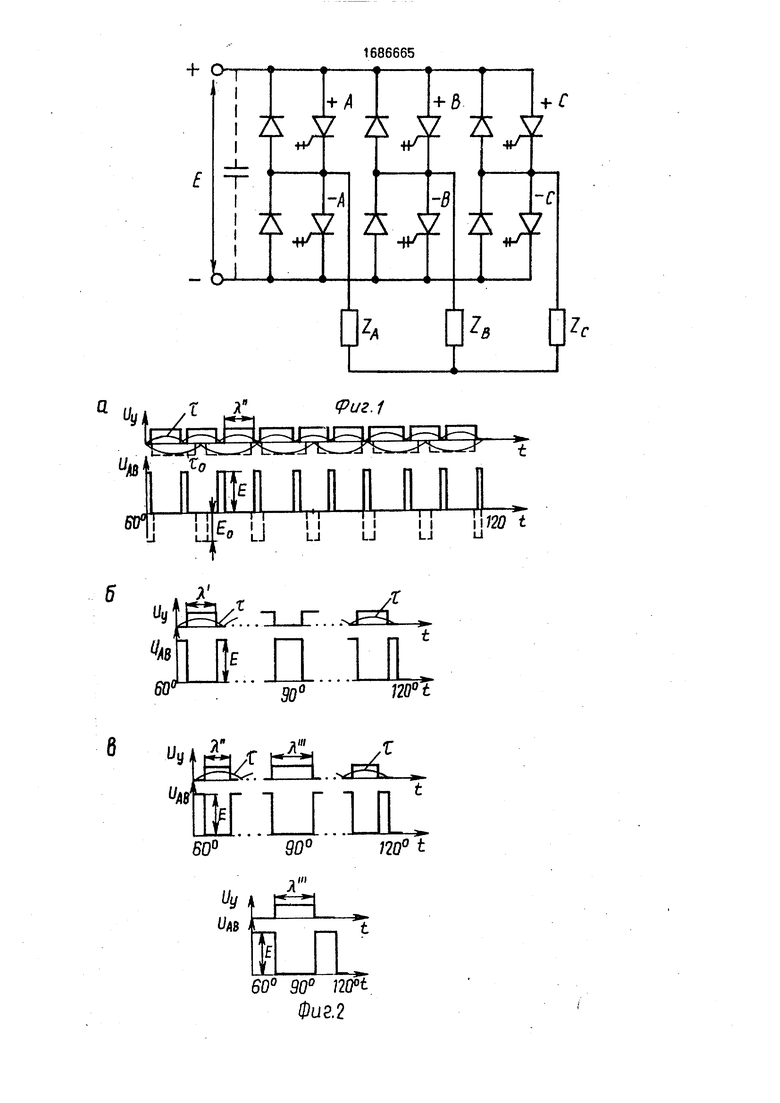
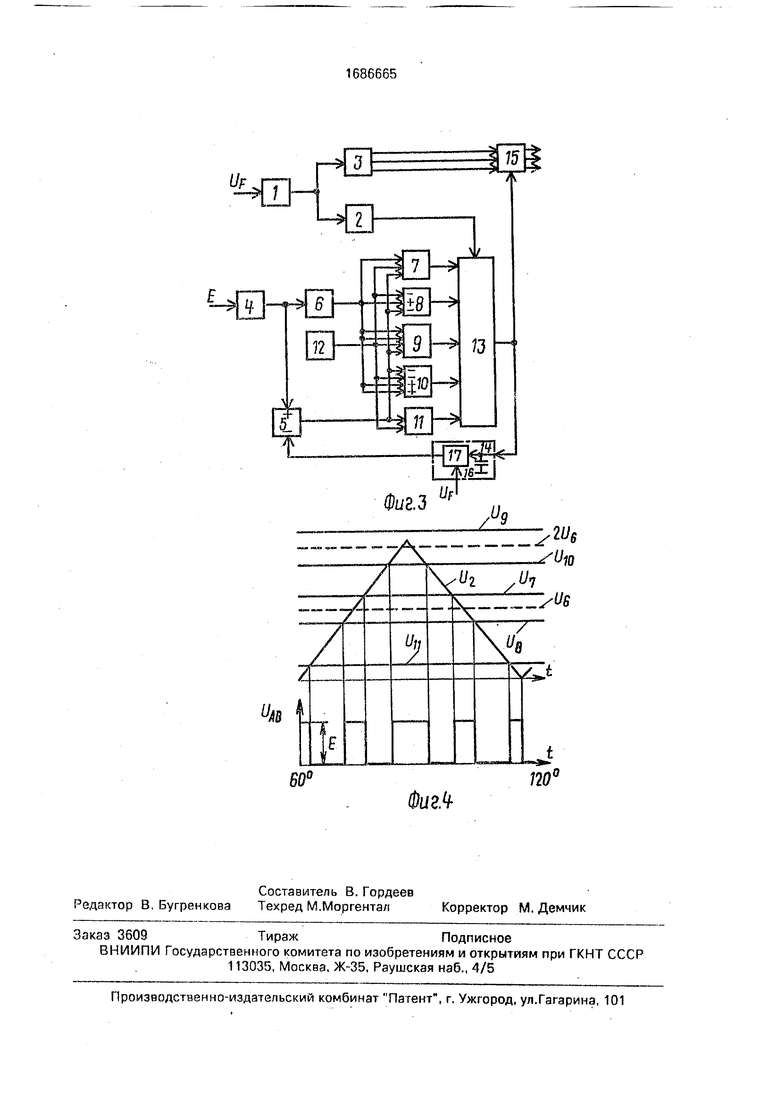
На фиг. 1 изображена упрощенная схема трехфазное мостового преобразователя, выполненного на базе полностью управляемых ключей; на фиг. 2 - временные диаграммы, иллюстрирующие предложенный способ управления преобразователем; на фиг 3 - структурная схема системы управлении, реализующей предложенный способ; на фиг 4 - временная диаграмма ее работы
Форма линейного выходного напряжения преобразователя UAB, а также сигналов управления Uy (выключающих импульсов, запирающих анодный ключ фазы А преобразователя) на тактовом интервале 60-120°, изображены на фиг. 2а. Приведенные кривые соответствуют амплитуде питающего напряжения, равной Е, Здесь же пунктиром показаны кривые управляющего и выходного напряжений при номинальном (минимальном) значении питающего напряжения EG. При этом принято, что ,5 Ео. а частотный диапазон связанного регулирования выходного сигнала преобразователя для случая равен шести ().
Управляющие сигналы (импульсы включения и выключения вентилей преобразователя) синтезируются в серединах соответствующих тактовых подынтервалов, на которые разбиваются тактовые интервалы 60-градусных продолжительностей, Формирование управляющих сигналов производят симметрично относительно середин тактовых интервалов, начало первого по счету тактового подинтервала внутри тактового интервала является синхронизированным с началом интервала, а конец последнего подинтервала синхронизирован с концом своего тактового интервала. Длительность т тактовых подынтервалов при этом находится в функциональной зависимости от относительной величины питающего напряжения в соответствии с
Ео 6 F0 N Ё
Таким образом, увеличение амплитуды питающего напряжения приводит к соответствующему пропорциональному уменьшению продолжительности т . Соответственно на полупериоде выходной частоты увеличивается количество сигналов управлении и число импульсов в полуволне выходного напряжения. Так, как показано на фиг. 2а, при ЕЙ ,5 Е и при на ин/ер- зале от 60 до 120° на начальной выходной частоте продолжительность тактовых интервалов в-полтора раза меньше, чем в сяу- чае , а количество формируемых сигналов управления в полтора раза больше. Подобная закономерность сохраняется и яри увеличении выходной частоты преобразователя.
Продолжительность тактовых подин- тервалов т при рассматриваемом алгоритме управления не зависит от величины выходной частоты преобразователя. Неизменены и абсолютные значения временных интервалов между серединами сигналов управления. Процесс регулирования выходсоотношением т --г
ной частоты осуществляется при этом двух- этапно, путем последовательного перехода от одного режима к другому. В первом режиме управления в центре тактовых интервалов формируются управляющие импульсы, длительность которых изменяется в соответствии с изменением абсолютной длительности тактового интервала (этому режиму соответствуют кривые, приведенные на фиг. 2а). Продолжительность каждого центрального импульса управления определяется при этом в соот: - Ч
-,где I - коливетствии с зависимостью
2(1-1 )(21-1)Ео + Е
6FoN()E
чество формируемых внутри каждой половины тактовых интервалов сигналов управления, включая центральный. Длительности Я остальных сигналов управления при
этом не зависят от величины выходной частоты преобразователя и находятся из соотношения
лп (i - 1) Ео
3F0N(2I-1)E -Вт0™ОМеНТ когда, в процессе увеличения частоты, продолжительность центрального на тактовом интервале сигнала управления уменьшится до нуля (фиг. 26), формирование управляющих сигналов начинается в соответствии с вторым режимом управления, при котором
длительности Я импульсов управления изменяют в соответствии с зависимостью
. А- лп. { р
).
12 i v Ј F0 N Е
Этот этап продолжается, пока продолжительность центрального выходного импульса не уменьшится до нуля (фиг. 2в). Поддержание в процессе регулирования преобразователя продолжительностей сигналов управления в соответствии f, приведенными соотношениями обеспечивает линейное изменение величины выходного напряжения независимо от амплитуды питающего напряжения. Значения граничных частот, переходных от одного режима регулирования к другому, определяются в общем виде из функциональных зависимостей
0
Fi F0
fr Fi F0
N(2I - 1 )Е
2(l -1 )(2I-1 )Eo + E0 N(21 -1 )E
2 I (2 i -1 )Eo-E0 Так, для анализируемого варианта зако- на управления преобразователем, когда ,5 Ео и , частоты F и F принимают последовательно следующие значения: при , 11 Fo; ,46Fo. F,,1.15Fo при ,15Fo, ,55Ро
при ,9 Fo, ,5 Fo
при Fo, Fo.
В соответствии с принципом формирования управляющих сигналов при управлении по предложенному способу, на частотах вплоть до номинальной выходной частоты преобразователя внутри каждого тактового интервала формируется по два сигнала управления (соответственно по пять выходных импульсов в полуволне ли- нейного выходного напряжения), что приводит к дополнительным потерям на коммутацию в диапазоне повышенных выходных частот преобразователя. Поэтому для любого N с энергетической точки эре- ния целесообразно, начиная с частоты
N(2 -1)Е
2 ( I - 1 ) ( 2 I - 1 ) Е,
F o Fn ч /
2 ™ 2(1-1 )(21-1)Ео + Е0
с NE -3с 3N Е
F° о-тЪ о. с F° т с-осуществлять 2. о to т to/ to
форсированный сдвиг управляющих импульсов к центру тактового интервала до
частоты FI Fo 3NE/5Eo, на который оба импульса управления сольются в один. После этого, при полуволна линейного выходного напряжения преобразователя формируется, как показано на фиг. 2г, их трех импульсов на полупериоде с уменьшением количества коммутаций вентилей на 40% и соответствующим снижением коммутационных потерь. Координаты Ci середин импульсов управления (импульсов выключения вентилей на интервале 60-90 в диапазоне регулирования частоты от до FI изменяются при этом в соответствии с функциональной зависимостью
- ,783 117 NFo4
Ci (- jр-) эл. град., их относительное значение не зависит в этом диапазоне от величины питающего преобразователь напряжения и от значения N и изменяется от ,9 эл. град, при до эл. град, при .Ha интервале 240-300° формирование управляющих сигналов осуществляется аналогично. В диапазоне выходных частот F i-F i продолжительность синтезируемых в центре тактовых интервалов сигналов управления изменяется в соответствии с зависимостью
i 1 . Ео А -н-р
6F
После уменьшения
6 Fo N Е
величины Я до нуля, наблюдаемом на часто- те FI, последующее увеличение выходной частоты преобразователя производится при неизменной величине выходного напряжения, что соответствует режиму постоянства
5 10 15
0
5
0 5
0
5
0
5
мощности применительно к асинхронному электроприводу переменного тока.
Принцип построения систем управления вертикального типа, реализующих описанный способ управления, рассмотрим на примере устройства, функциональная схема которого изображена на фиг. 3. Генератор 1 тактовых импульсов, частота следования которых определяет и в 12 раз повышает выходную частоту преобразователя, связан с генератором 2 развертывающего пилообразного напряжения и с трехразрядным регистром 3. Датчик 4 амплитуды питающего напряжения присоединен к плюсовому входу сумматора 5, и, через согласующий усилитель 6, к входам сумматора 7-11. Количество указанных сумматоров в общем случае равно числу сигналов управления, формируемых внутри каждого тактового интервала на начальной выходной частоте преобразователя при максимальной амплитуде питающего напряжения. На другие входы сумматоров 7-11 поступают сигналы с выходов сумматора 5 и источника 12 опорного напряжения. Выходы сумматоров 7-11 подключены к блоку 13 формирования импульсов управления, в котором осуществляется последовательное сопоставление сигналов с выходов сумматоров 7-11 с напряжением развертки Ua ге- кератора 2 и выработка командных сигналов на формирование фронтов выход- ныхимпульсов в моменты равенства указанных сигналов. Блок 13 связан также с блоком 14 определения суммарной длительности выходных импульсов и с основным входом логического распределителя 15 управляющих импульсов. На входе блока 14 включен конденсатор 16, выделяющий постоянную составляющую последовательности импульсных сигналов блока 13, напряжение с которого поступает далее на делитель 17, в котором осуществляется деление упомянутого сигнала на аналоговый сигнал задания въсодой частоты Up, в рззультатечего на вьмздз блоха 14 формируется напряжение, пропорциональное суммарной на полупериоде длительности выходных импульсов.
На фиг. 4 приведены временные диаграммы, соответствующие интервалу 60-120° полуволны выходной кривой преобразователя и поясняющие принцип действия системы управления. Индексы сигналов на фиг. 4 при этом соответствуют напряжениям на выходах узлов и блоков системы управления с соответствующими цифровыми обозначениями. Величина напряжения на выходе датчика 4 уменьшается пропорционально увеличению напряжения Е, при этом при ,2 U2m, где U2m - максимальная амплитуда сигнала генератора развертки 2.
наблюдаемая на частоте FO. Коэффициент передачи усилителя 6 при этом в случае нечетного N равен двум, Амплитуда сигнала U12 источника 12 выбирается из соотношения U U/io/N. Контур обратной связи устройства, включающий узлы 4, 5, 13 и 14, обеспечивает непрерывное формирование корректирующего сигнала, посгупэющего па входы сумматоров 7-11 и автоматически поддерживающего постоянство суммарной вольгсекундной площади пыходных импуль- соч на полупсриоде из всем диапазоне регулирования при флюктузциях величины питающего напряжения. Это эквивалентно пинепному изменению величины среднего из полурсриодезначения выходного напряжения, а также первой гармоники выходного напряжения преобразователя в ходе регулирования частоты выходною сигнала. Таким образом, предложенный способ управления надежной достаточно точно позволяет линеаризовать регулировочную характеристику преобразователя при колебаниях амплитуды питающего напряжения в широких пределах. Изменение (уменьшение) продолжительности тактовых подинтервалов, в центрах которых формируются управляющие сигналы, имеющее место при увеличении питающего напряжения, способствует уменьшению амплитуды пульсации фазных гоков двигателя, питающегося от преобразователя, и соответствующему снижению пульсаций момента нагрузки. Линеаризация регулировочной характеристики и уменьшение пульсаций момента нагрузки приводит к улучшению энергетических характеристик структуры преобразователь-двигатель - нагрузка и обеспечивает близкое к оптимальному протекайте процессов в преобразовательной системе.
Формула изобретения Способ управления трехфазным вен- ТЯПЬПУЧ преобразователем для электропривода с N-кратным диапазоном связанного регулирования частоты и величины выходного напряжения, заключающийся в том, что формируют про- шпофазные управляющие сигналы для управления анодными и катодными вентилями каждой из фаз с заданной частотой, а для анодной и катодной группы основных вентилей разных фаз управляющие сигналы
сдвигают на 60 эл.град,, для каждого из основных вентилей модулируют управляющий сигнал па тактовых интервалах от 60 до 120 эл. град, и от 240 до 300 зл. град., и разбивают
их на этих интервалах на тактовые подин- тервалы, при этом число управляющих импульсов на тактовых интервалах с ростом частоты F уменьшают, а начало первого тактового подинтервала и конец последнего
0 синхронизированы с началом и концом соответствующего тактового интервала, формирование каждого 1-го от начала и конца тактового интервала сигнала управления осуществляют при изменении выходной ча5 стоты преобразователя от начальной частоты Fo до F i, при этом при изменении выходной частоты от FO до () внутри каждой половины тактовых интервалов формируют по I сигналов управления с длитель0 ностью Я ,при FI F на каждой половине тактовых интервалов формируют по(М)-п сигналов выключения и включения вентилей с длительностью А , а i-й сигнал управления формируют в середине каждого
5 тактового интервала с длительностью т- личающийся тем, что, с целью линеаризации регулировочной характеристики преобразователя, в случае изменения питающего напряжения от номинальной (мини0 мальиой) величины Ео до Е на всем диапазоне регулирования длительности тактовых подинтервалов гопределяют по функциональной зависимости
ч ч 1w .величины Я, Я ил находят
г Ео 5 т 6F0NE
соответственно как А
12 i F
Ео
N Е
/- 0-1)Еои 1
Лл .- . х л - Л
3 Fo N ( 2 I - 1 ) Е
6F
45
2(i-1)(2i-1)Eo + En 6FoN(2l-1)l а значения
граничных частот F i и определяют как
FJ-FN(2I-1)E
° 2(1-1)(21-1)Ео + Е0
(2t-1)E
Г| О « . « .- ч -
Я
21(2 -1 )Е0 -Ео
Ј0° 30° 20°t
Фиг 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления трехфазным регулируемым мостовым преобразователем | 1988 |
|
SU1638780A1 |
| Способ управления трехфазным регулируемым мостовым инвертором | 1987 |
|
SU1492434A1 |
| Способ управления трехфазным вентильным преобразователем | 1990 |
|
SU1720132A1 |
| Способ управления трехфазным регулируемым вентильным преобразователем | 1989 |
|
SU1734179A1 |
| Способ управления трехфазным регулируемым мостовым преобразователем | 1990 |
|
SU1721760A1 |
| Способ управления преобразователем с широтно-кодовым регулированием | 1990 |
|
SU1757063A1 |
| Способ управления трехфазным регулируемым мостовым инвертором | 1988 |
|
SU1554094A2 |
| Способ управления регулируемым мостовым инвертором напряжения | 1989 |
|
SU1734180A2 |
| Способ управления трехфазным преобразователем с широтно-кодовым регулированием | 1989 |
|
SU1646030A1 |
| Способ управления трехфазным вентильным преобразователем | 1988 |
|
SU1686663A1 |
Изобретение относится к электротехнике и может быть использовано при управлении регулируемыми преобразователями, питающими системы асинхронного электропривода. Целью изобретения является линеаризация регулировочной характеристики преобразователя при изменениях питающего напряжения. Связанное регулирование частоты и величины выходного напряжения преобразователя на базе АЙН осуществляется непрерывным плавным изменением длительностей пауз между импульсами управления и самих сигналов управления на центральных участках тактовых интервалов 60-градусных продолжи- тольностей, расположенных в серединах зон проводимости и закрытого состояния соответствующих вентилей силовой схемы. На поддиапазонах регулирования, на которых изменяется продолжительность указанных центральных пауз, длительности сигналов управления варьируются в зависимости от текущих значений выходной частоты, от относительной величины питающего напряжения и от количества вырабатываемых импульсов управления. Внутри зон регулирования с формированием управляющих импульсов в центрах тактовых интервалов продолжительность остальных сигналов управления определяется величиной питающего напряжения. В функциональной зависимости с амплитудой питающего напряжения находятся, кроме того, продолжительность тактовых подин- тервалов, внутри которых формируются сигналы управления и; соответственно, количество выходных импульсов, формируемых в полуволне выходной кривой, а также значения граничных частот, переходных от одного поддиапазона регулирования к другому. 4 ил. О 00 о о о ел
| Устройство для управления регулируемым инвертором напряжения | 1984 |
|
SU1249675A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления трехфазным регулируемым мостовым инвертором | 1987 |
|
SU1492434A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
