/////ММ/#///ЯЯ
V//////S///
Изобретение относится к механизмам для преобразования вращательного движения в возвратно-поступательное, а также к приводам режущих аппаратов кормоубо- рочных машин и зерноуборочных машин.
Целью изобретения является увеличение надежности работы за счет снижения уровня вибраций, динамических нагрузок в звеньях механизма путем уменьшения числа подвижных звеньев и исключения избыточных связей.
Указанная цель достигается тем, что в механизме привода, содержащем корпус, ведущий вал с установленной на нем качающейся шайбой и соединенное с ней ведомое звено, соединение ведомого звена с качающейся шайбой выполнено в виде шара, заключенного в цилиндр и имеющего возможность перемещения вдоль оси цилиндра, при этом последний жестко соединен с ведомым звеном.
Кроме того, шарнир, служащий для соединения ведомого звена с качающейся шай- .бой, выполнен в виде шара с различной жесткостью во взаимоперпендикулярных направлениях.
Механизм привода снабжен дополнительным симметричным ведомым звеном.
Число избыточных связей механизма определяется формулой
q W-6n+5 ps+4p4+3 рз+2 Р2+р 1, где W - степень подвижности;
п - число подвижных звеньев;
pi- число кинематических пар i-ro класса.
Для предлагаемого механизма число избыточных связей равно
q 1 - 6 3+ 5 3+ 2 1 О, где - число подвижных звеньев;
- число кинематических пар 5-го класса, образованных звеньями 8-2,4-2,5-8;
- число кинематических пар 2-го класса, образованных звеньями 4-5.
Для известного механизма
6+5 -6+3 Таким образом, у известного механизма имеются четыре избыточные связи, а у предлагаемого механизма они отсутствуют.
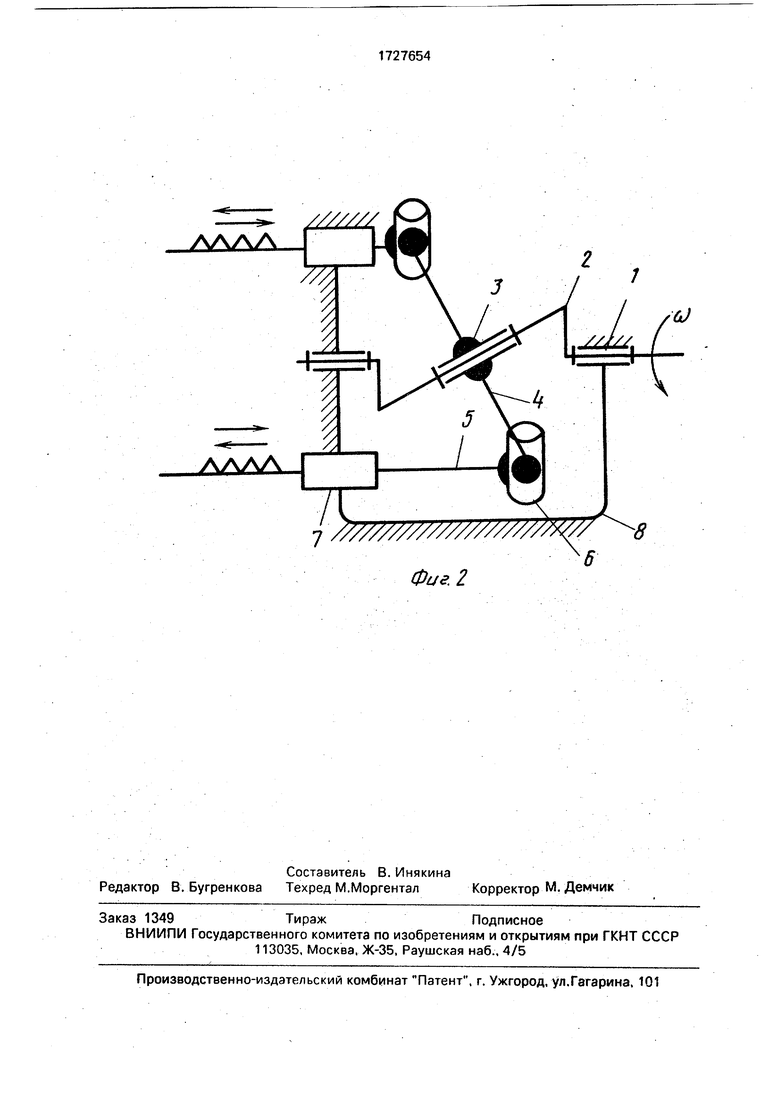
На фиг.1 приведена кинематическая схема предлагаемого механизма; на фиг.2 - уравновешенный механизм.
В корпусе на подшипниках 1 качения установлен ведущий вал 2, на ведущем валу 2 на подшипниках 3 качения установлена качающаяся шайба 4, которая соединена с ведомым звеном 5 посредством шарнира 6, представляющего собой шар, заключенный в цилиндр и имеющий возможность перемещения вдоль оси цилиндра. Ведомое звено
5 передвигается в.направляющих 7. Механизм заключен в корпус 8.
Механизм привода работает следующим образом.
Вращение ведущего вала 2 преобразуется в сферическое движение качающейся шайбы 4. Сферическое движение качающейся шайбы 4 с помощью шарнира 6 преобразуется в возвратно-поступательное
0 движение ведомого звена 5.
В предлагаемом механизме ввиду отсутствия избыточных связей, малом числе подвижных звеньев и рациональности конструкции не требуется точное пересечение
5 в одной точке осей вращения ведущего вала 2 и качающейся шайбы 4. Кроме того, оси ведомого звена 5 и ведущего вала 2 могут быть непараллельны и лежать в пересекающихся плоскостях, что значительно снижает
0 требования к точности обработки звеньев механизма.
Преимуществом предлагаемого механизма привода по сравнению с известными является значительное уменьшение числа
5 подвижных звеньев, снижение металлоемкости, уменьшение износа в кинематических парах, повышение коэффициента полезного действия, улучшение условий монтажа и демонтажа, устранение заклини0 ваний и поломок, уменьшение продолжительности обкатки, кроме того, реакции в, кинематических парах не зависят от деформации звеньев и определяются однозначно от действующих нагрузок, что приводит к
5 повышению надежности и долговечности механизма.
Формул а-изобретения
1.Механизм привода, содержащий корпус, ведущий вал с установленной на нем
0 качающейся шайбой и соединенное с ней ведомое звено, отличающийся тем, что, с целью увеличения надежности работы привода за счет снижения уровней вибраций, Динамических нагрузок в звеньях меха5 низма путем исключения избыточных связей и уменьшения числа подвижных звеньев, соединение ведомого звена с качающейся шайбой выполнено в виде шара, заключенного в цилиндр и имеющего воз0 можность перемещения вдоль оси цилиндра, при этом последний жестко соединен с ведомым звеном.
2.Механизм по п. 1, о т л и ч а ю щи й- с я тем, что шар выполнен с различной
5 жесткостью во взаимоперпендикулярных направлениях.
3.Механизм поп. 1, о т л и ч а ю щ и й- с я тем, что он снабжен дополнительным ведомым звеном, установленным симметрично ведомому звену.
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод режущего аппарата | 1990 |
|
SU1797778A1 |
| Механизм привода режущего аппарата | 1989 |
|
SU1704675A1 |
| Механизм привода режущего аппарата | 1988 |
|
SU1565386A1 |
| Преобразующий зубчатый механизм | 1989 |
|
SU1726874A1 |
| Привод режущего аппарата | 1990 |
|
SU1762788A1 |
| Привод ножа режущего аппарата | 1990 |
|
SU1794366A1 |
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2013 |
|
RU2543135C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2011 |
|
RU2478473C1 |
| ИМПУЛЬСНЫЙ МЕХАНИЧЕСКИЙ ВАРИАТОР | 1991 |
|
RU2011075C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2009 |
|
RU2410589C1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к механизмам для преобразования вращательного движения в возвратно-поступательное, а также к приводам режущих аппаратов кормоуборочнцх и зерноуборочных машин. Целью изобретения является увеличение надежности в работе привода за счет снижения уровней вибраций, динамических нагрузок в звеньях механизма путем исключения избыточных связей и уменьшения числа подвижных звеньев. Механизм привода состоит из корпуса 8, в котором расположен ведущий вал 2, качающейся шайбы 4 и ведомого звена 5. Механизм работает следующим образом. Вращение ведущего вала преобразуется в сферическое движение качающейся шайбы. Сферическое движение качающейся шайбы с помощью шарнира преобразуется в возвратно-поступательное движение ведомого звена. 2 з.п. ф-лы, 2 ил. (л
| Механизм привода режущего аппарата (его варианты) | 1983 |
|
SU1195939A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
