W
Nl
О
со
1} 16
(plU.I
Изобретение относится к элементам систем с цифровым программным управлением и предназначено для использования при исследовании, настройке и экспериментальном определении динамических характеристик следящих приводов, а также совместно с устройствами программного управления а.нтенными и радиотелескопами для автоматическо го поиска объекта при его отклонении от программной траектории.
I
Цель изобретения - расширение
функциональных в.озможностей устрой- ства и уменьшение динамических нагрузок на цифровой следящий привод.
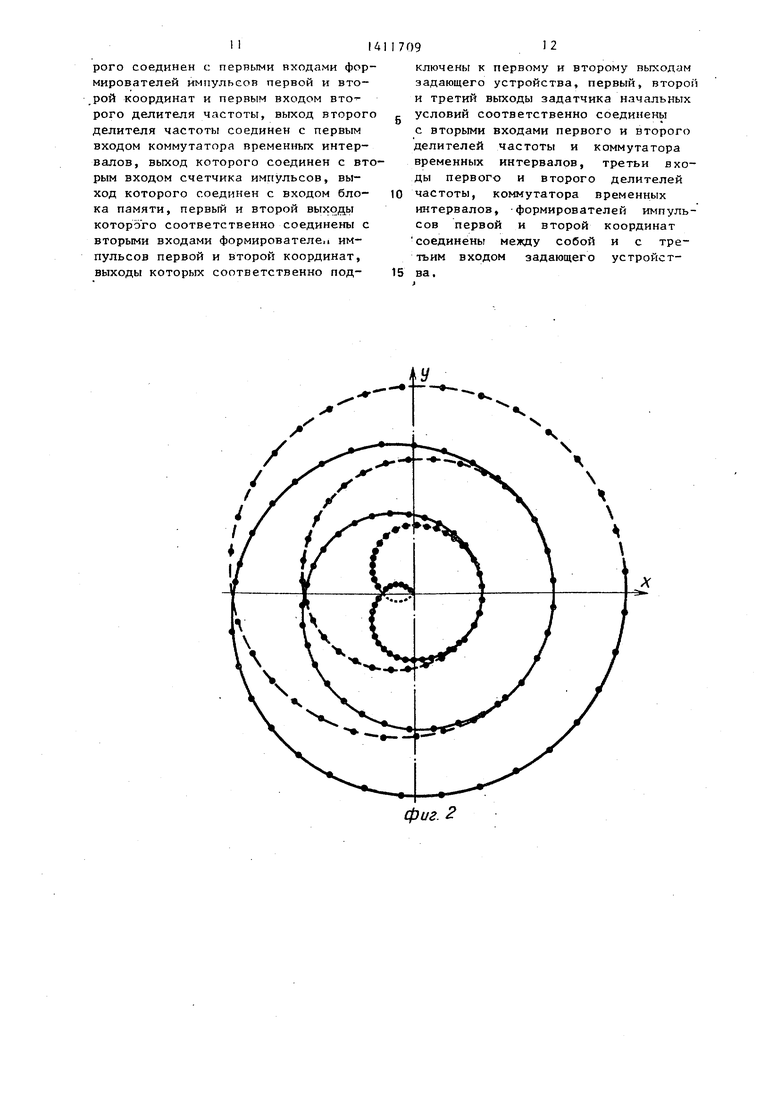
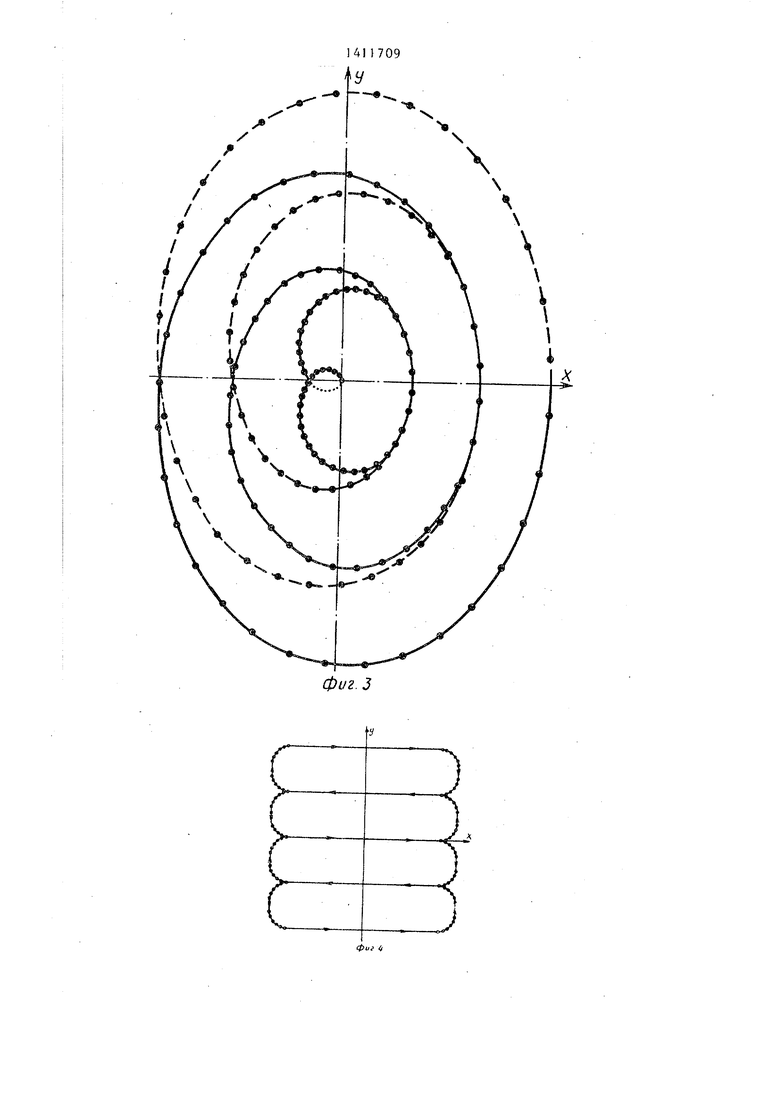
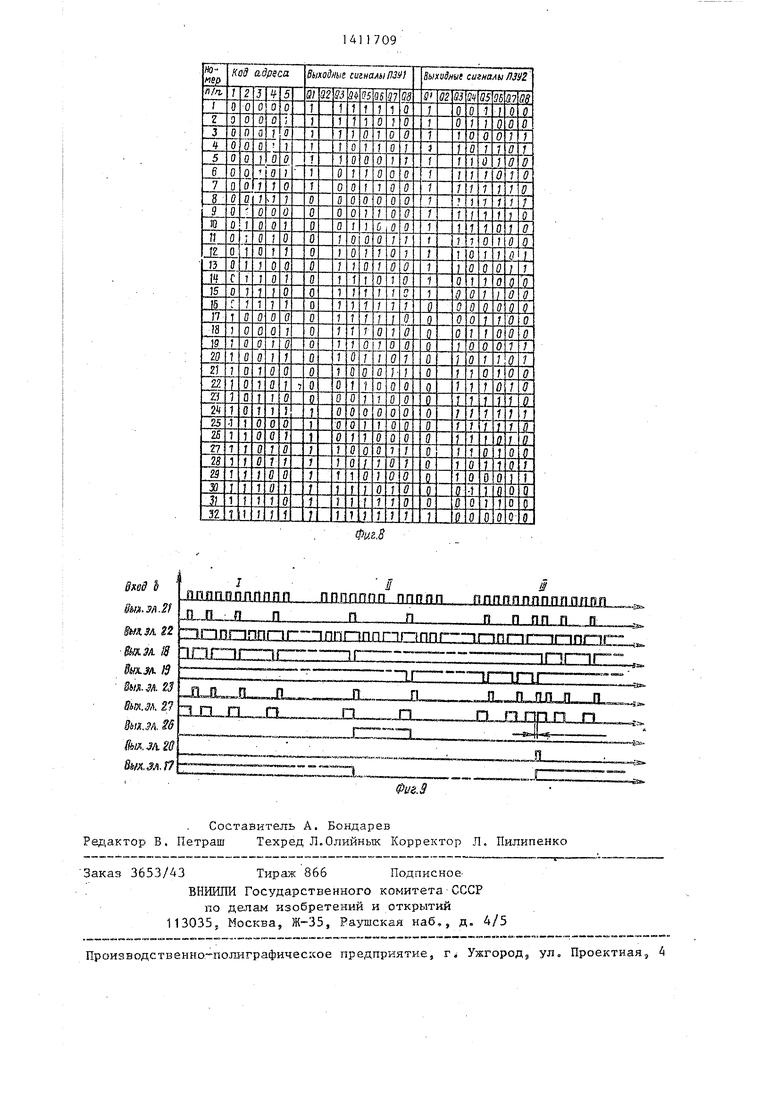
На фиг. 1 представлена структур- ная схема задающего устройства} на фиг. 2-4 - траектории поиска; pea- лиз.уемые устройством; на фиг. 5-7 - схемы реализации устройства, на фиг. 8 - пример программирования блока памяти} на фиг. 9 - временные диаграммы работы коммутатора времен- ных интервалов.
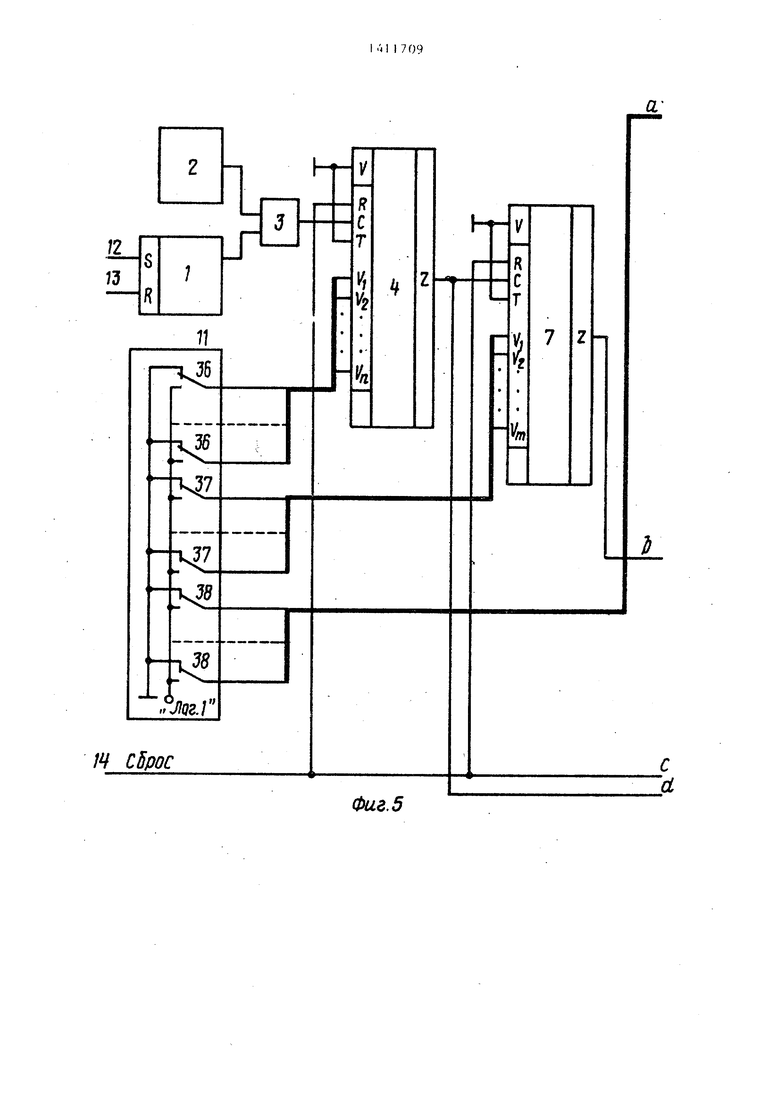
Устройство содержит триггер 1, генератор 2, элемент И 3, делитель 4 частоты, формирователи 5 и 6 импульсов первой и второй координат, второй делитель 7 частоты, коммутатор 8 временных интервалов, счетчик 9 импульсов, блок 10 памяти задатчик 11 начальных условий, первый вход 12 Пуск, второй вход 13 Стоп, третий вход 14 Сброс, выходы 15 и 16 устройства.
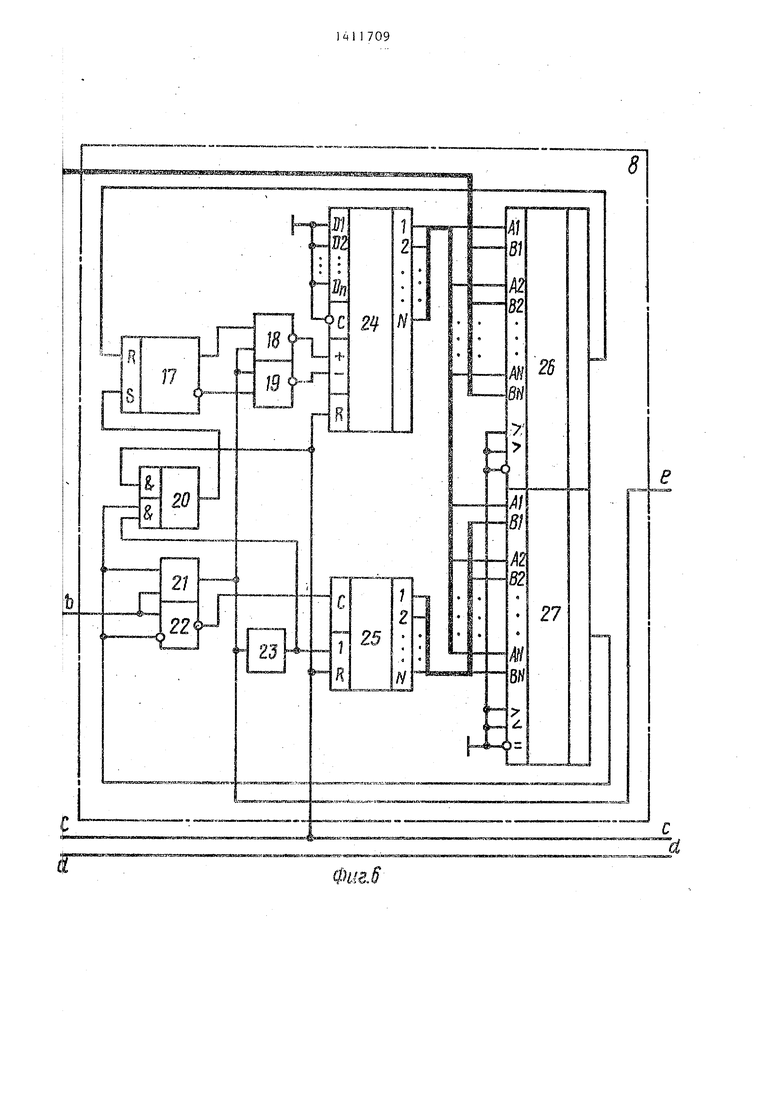
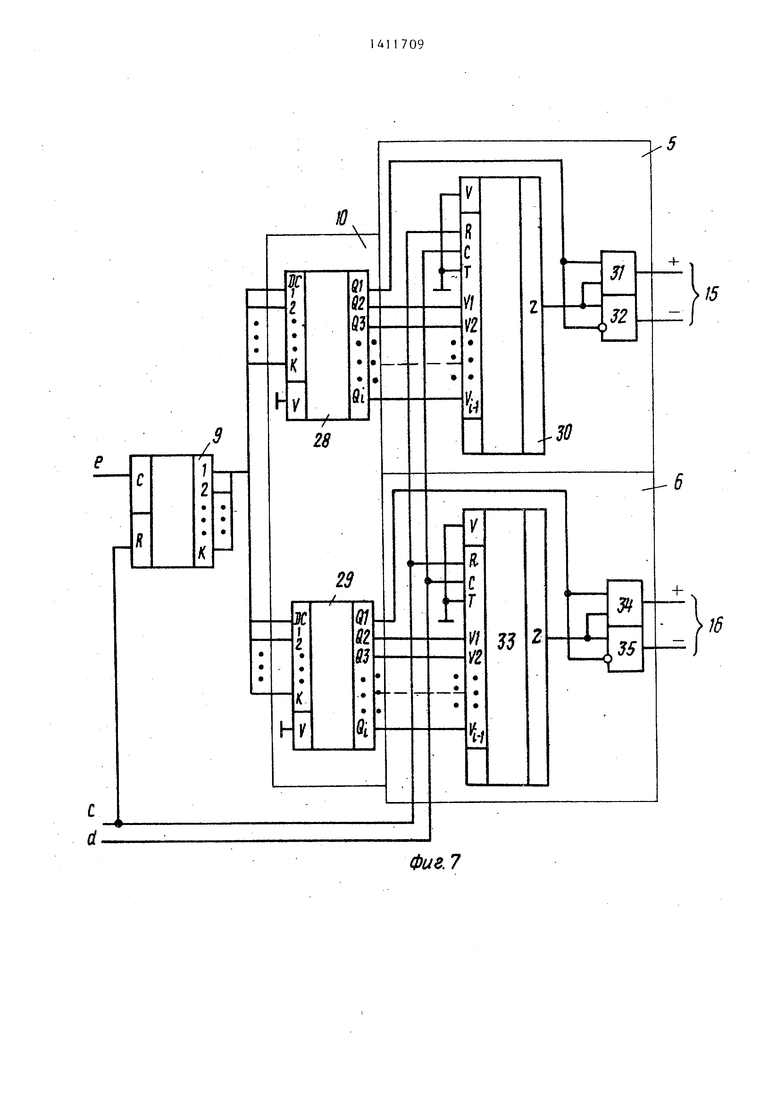
Коммутатор 8 временных интервалов содержит RS-триггер 17, элементы И-НЕ 18 и 19, .элемент И-ИПИ 20, элемент И 21, элемент И-НЕ 22, элемент 23 задержки, реверсивный счетчик 24, счетчик 25 импульсов, схемы 26 и 27 сравнения. Блок 10 памяти содержит два блока 28 и 29 памяти.
Формирователь 5 импульсов первой координаты содержит делитель 30 с переменным коэффициентом деления и два элемента И 31 и 32, формирова тель 6 импульсов второй координаты - делитель 33 с переменньм коэффициентом деления и два элемента И 34 и 35.
Задатчик 11 начальных условий содержит три группы переключателей 36-38.
Алгоритм работы задающего устройства следующий.
Параметрическое уравнение; эвольвенты по координатам х и у имеет вид:
X K(cos( + d sine/) ,
е KCsiz of - ) ,
где К - радиус круга эвольвенты} о( - угол, на который отклоняется радиус-вектор эвольвенты.
Шаг спирали эвольвенты Н имеет следующую зависимость:
К
Н
2.fr
Следовательно, Н
V s;
(cos о( + ol sinoO ,
2Tl ti у -(sinof -(/cosoi ) .
Для работы устройства в унитарном коде определим значения приращений по Координатам:
йУ.
Н
х (o()of - DoLcosd,
Tl
4 у у WAol - jo/sinc/.
Разделим спираль в пределах одного оборота радиуса-вектора на ш равных частей с значением угла в секторе
, 21
4ос - будем аппроксимировать спираль в пределах ucf линейной функцией (точность воспроизведения спирали зависит от числа т). Тогда пЛо, где п 1,2,3... - целые, положительные числа.
Выражения для приращений принимаследующий вид: 2
4х пН т
cosn йо(
(I)
45
йу гш
sin п ud .
(2)
Скорость движения по координатам определяется из следующих выражений:
V,
Ах
Vv
ЛУ
4t где ut - интервал времени измерений,
п
f
- интервал времени.
в течение которого спираль .аппроксимируется, прямой линией, причем , 2,3...
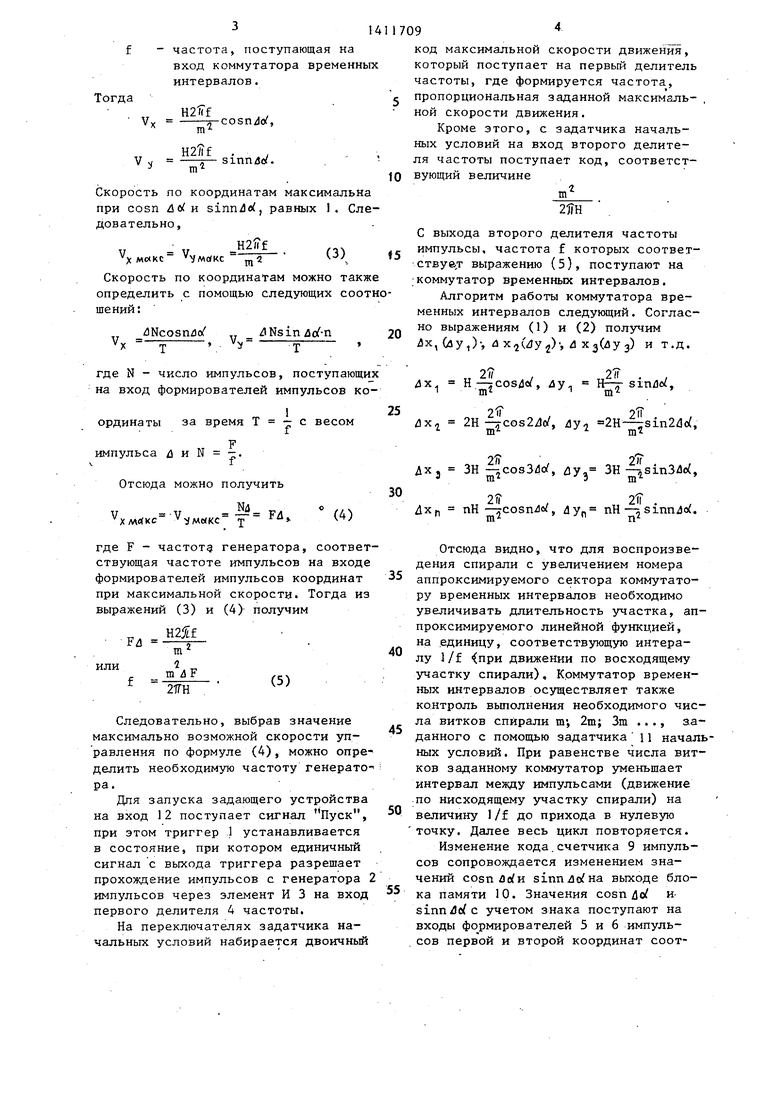
- частота, поступающая на
1411709
код максимальной скорости движенй я,
| название | год | авторы | номер документа |
|---|---|---|---|
| Задающее устройство для цифрового следящего привода | 1983 |
|
SU1144088A1 |
| Телевизионное следящее устройство | 1982 |
|
SU1019672A2 |
| Задающее устройство для цифрового следящего привода | 1985 |
|
SU1325412A1 |
| Преобразователь полярных координат вектора в прямоугольные | 1976 |
|
SU596955A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365963C2 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365965C2 |
| Устройство для сварки | 1987 |
|
SU1563916A1 |
| Устройство для кинематического дробления стружки на токарных станках с числовым программным управлением | 1981 |
|
SU1004974A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1783473A1 |
Изобретение относится к элементам систем с цифровым управлением и предназначено для использования при исследовании, настройке и экспериментальном определении динамических характеристик следящих- приводов. Цель изобретения - расширение . функциональных возможностей и уменьшение динамических нагрузок на цифровой следящий привод. Устройство содержит триггер 1, генератор импульсов 2 элемент ИЗ, первый делитель частоты 4, формирователи импульсов первой и второй координат 5, 6, второй делитель частоты 7, коммутатор временных интервалов 8, счетчик импульсов 9, блок памяти 10, задатчик начальных условий 11. Устройство имеет более широкие функциональные возможности для осуществления поиска, проведения испытаний и настройки по различному классу задаваемых траекторий в широком диапазоне скоростей и обеспечивает з еньшение динамических нагрузок на следящий привод за счет изменения координат по гармониIческому закону. 9 ил. W
вход коммутатора временных интервалов.
Тогда
.
m
mi
sinnjjo.
Скорость по координатам максимальна при cosn 4 0 и sirmuet равных 1. Следовательно,
H2/(f
V,
X мшкс
VMOTKC
m
(3)
Скорость по координатам можно также определить с помощью следующих соотношений:
Ncosnja V :; ,
V
Nsin Л(/-п
где N - число импульсов, поступающих на вход формирователей импульсов координаты за время Т - с весом
импульса d и N -.
I.I
можно получить Nd
fji VMdKC р
(4)
где F - частот генератора, соответствующая частоте импульсов на входе формирователей импульсов координат при максимальной скорости. Тогда из выражений (3) и (4) получим
FU
или
f -
21ГН
(5)
Следовательно, выбрав значение максимально возможной скорости управления по формуле (4), можно опре- делить необходимую частоту генерато- ра.
Для запуска задающего устройства на вход 12 поступает сигнал Пуск, при этом триггер 1 устанавливается в состояние, при котором единичный сигнал с выхода триггера разрешает прохождение импульсов с генератора 2 импульсов через элемент И 3 на вход первого делителя 4 частоты.
На переключателях задатчика начальных условий набирается двоичный
который поступает на первый делитель частоты, где формируется частота, пропорциональная заданной максимальной скорости движения.
Кроме этого, с эадатчика начальных условий на вход второго делителя частоты поступает код, соответствующий величине
т
21|Н
С выхода второго делителя частоты импульсы, частота f которых соответствует выражению (5), поступают на коммутатор временных интервалов.
Алгоритм работы коммутатора временных интервалов следующий. Согласно выражениям (1) и (2) получим Лх, Сзу,)-, ), J ХЗ(ЛУ з) и т.д.
5
, 2 4х Н -cosdof, лу
21Г dx 2Н -cos2M, uy-i
2 , . Н-5- sindoi.
m
m0|Г
2H- sin2do(, m
ДХ, 3H -ясоз34о, йу, ЗН Asin3do(,
ш - э m
Лх пН -cosn ei, 4Ул пН -sinnjof.
5
0
5
0
5
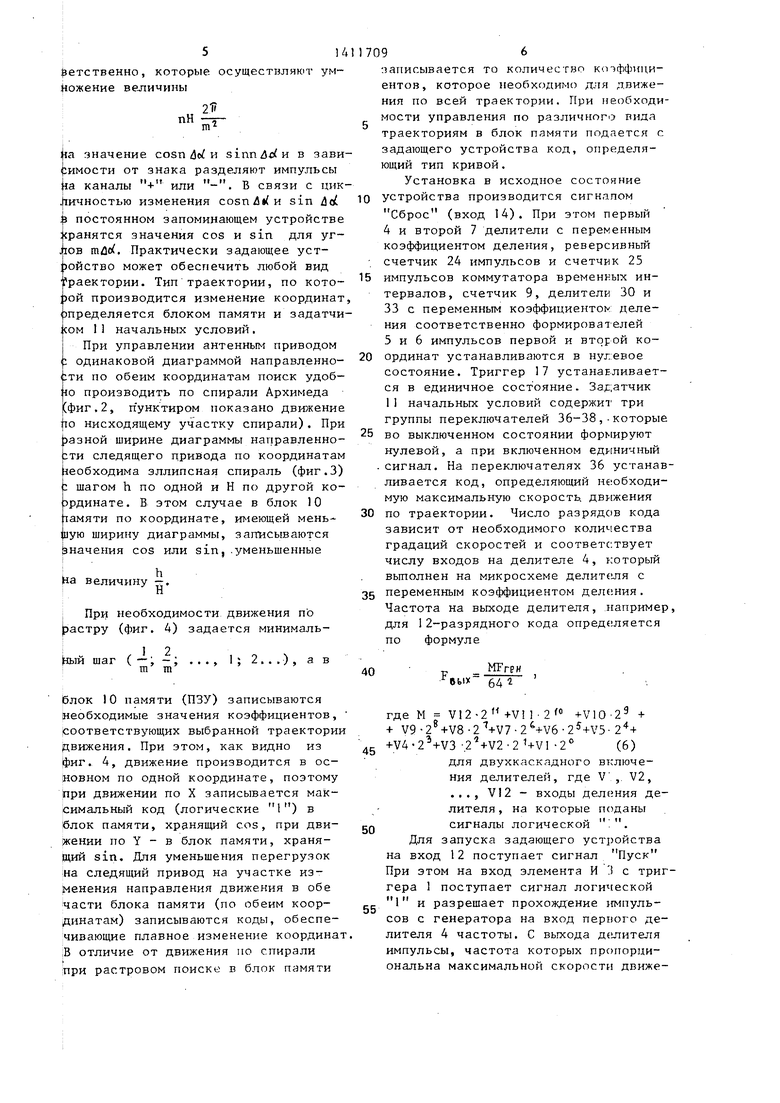
Отсюда видно, что для воспроизведения спирали с увеличением номера аппроксимируемого сектора коммутатору временных интервалов необходимо увеличивать длительность участка, аппроксимируемого линейной функцией, на единицу, соответствующую интера- лу 1 /f (при движении по восходящему участку спирали), Коммутатор временных интервалов осуществляет также контроль вьтолнения необходимого числа витков спирали т; 2т; 3т ..., заданного с помощью эадатчика 11 начальных условий. При равенстве числа витков заданному коммутатор уменьшает интервал между импульсами (движение по нисходящему участку спирали) на величину 1/f до прихода в нулевую точку. Далее весь цикл повторяется.
Изменение кода.счетчика 9 импульсов сопровождается изменением значений cosn Д of и sinndo Ha выходе блока памяти 10. Значения cosn Ло и- учетом знака поступают на входы формирователей 5 и 6 импульсов первой и второй координат соот141
етственно, которые осуществляют умножение ве-личины
пН
21
т
)(ia гзначение cosn ci и (и в зави |:имости от знака разделяют импульсы Йа каналы + или -. В связи с цик ичностью изменения со8пЛ(и sin ud i постоянном запоминающем устройстве хранятся значения cos и sin для углов тДс(. Практически задающее уст- оойство может обеспечить любой вид траектории. Тип траектории, по кото- )ой производится изменение координат определяется блоком памяти и задатчи :сом II начальных условий.
При управлении антенным приводом с одинаковой диаграммой направленности по обеим координатам поиск удоб- :io производить по спирали Архимеда фиг. 2, п унктиром показано движение 1О нисходящему участку спирали). При разной ширине диаграммы натгравленно- ;ти следящего привода по координатам необходима зллипсная спираль (фиг.З) : шагом h по одной и Н по другой ко- эрдинате. В этом случае в блок 10 тамяти по координате, имеющей мень Шую щирину диаграммы, запг1сываются Ьначения cos или sin,.уменьшенные
На величину -, Н
; При необходимости движения по эастру (фиг. А) задается минималь12
Иый шаг (-; -; ..., 1; 2 . . . ) , а в га та
блок 10 памяти (ПЗУ) записываются необходимые значения коэффициентов, соответствующих выбранной траектории движения. При этом, как видно из фиг. 4, движение производится в основном по одной координате, поэтому при движении по X записывается максимальный код (логические 1) в блок памяти, хранящий cos, при движении по Y - в блок памяти, хранящий sin. Для уменьшения перегрузок иа следящий привод на участке изменения направления движения в обе части блока памяти (по обеим координатам) записываются коды, обеспечивающие плавное изменение координат 3 отличие от движения по спирали :при растровом поиске в блок памяти
96
записывается то количество К пффипи- ентов, которое необходимо для движения по всей траектории. При необходимости управления по различнопэ вида траекториям в блок памяти подается с задающего устройства код, определяющий тип кривой.
Установка в исходное состояние
устройства производится сигнапом Сброс (вход 14). При этом первый
4и второй 7 делители с переменным коэффициентом деления, реверсивный
счетчик 24 импульсов и счетчик 25 импульсов коммутатора временных интервалов, счетчик 9, делители 30 и 33 с переменным коэффициентов деления соответственно формирователей
5и 6 импульсов первой и второй ко- ординат устанавливаются в Hyj::eBoe
состояние. Триггер 17 устанавливается в единичное состояние. Задатчик 11 начальных условий содержит три группы переключателей 36-38,которые
во выключенном состоянии формируют
нулевой, а при включенном единичный сигнал. На переключателях 36 устанавливается код, определяющий н юбходи- мую максимальную скорость, движения
по траектории. Число разрядов кода зависит от необходимого количества градаций скоростей и соответс;твует числу входов на делителе 4, :оторый вьтолнен на микросхеме делит« ля с
переменным коэффициентом деления.
Частота на выходе делителя, .например, для 12-разрядного кода определяется по формуле
40
МГген вых 641
где М VI2-2 +vn 2 +V10 2 + + V9-24v8-2Vv7-2 +V6-2 +V5- +V4 2 +V3 .2 +V2 2 +VI -2° (6)
для двухкаскадного включения делителей, где V ,. V2, ..., VI2 - входы делвшия делителя , на которые псэданы
Для запуска задающего уст)ойства на вход 12 поступает сигнал Пуск При этом на вход элемента И i с триггера 1 поступает сигнал логической 1 и разрешает прохождение импульсов с генератора на вход первого делителя 4 частоты. С выхода д«1лителя импульсы, частота которых пропорциональна максимальной скорости движе7lAl
ния, поступают на делители с переменным коэффициентом деления 7, 30, 33. Делитель 7 осушествляет у1.;ножение
,1
частоты на величину М
m
21(Н
(по формуле (6)). Значение М поступает с задатчика начальных условий с переключателей 36. При необходимости задания параметра Н в виде двоичного (десятичного) кода с дискретом Л между переключателями 37 и делителем
7подключается ПЗУ, на вход которого поступает код Н, а на выходе формируется значение М с заданным дискретом Л. С выхода делителя 7 импульсы частотой f поступают на коммутатор
8временных интервалов (элементы 21 и 22).
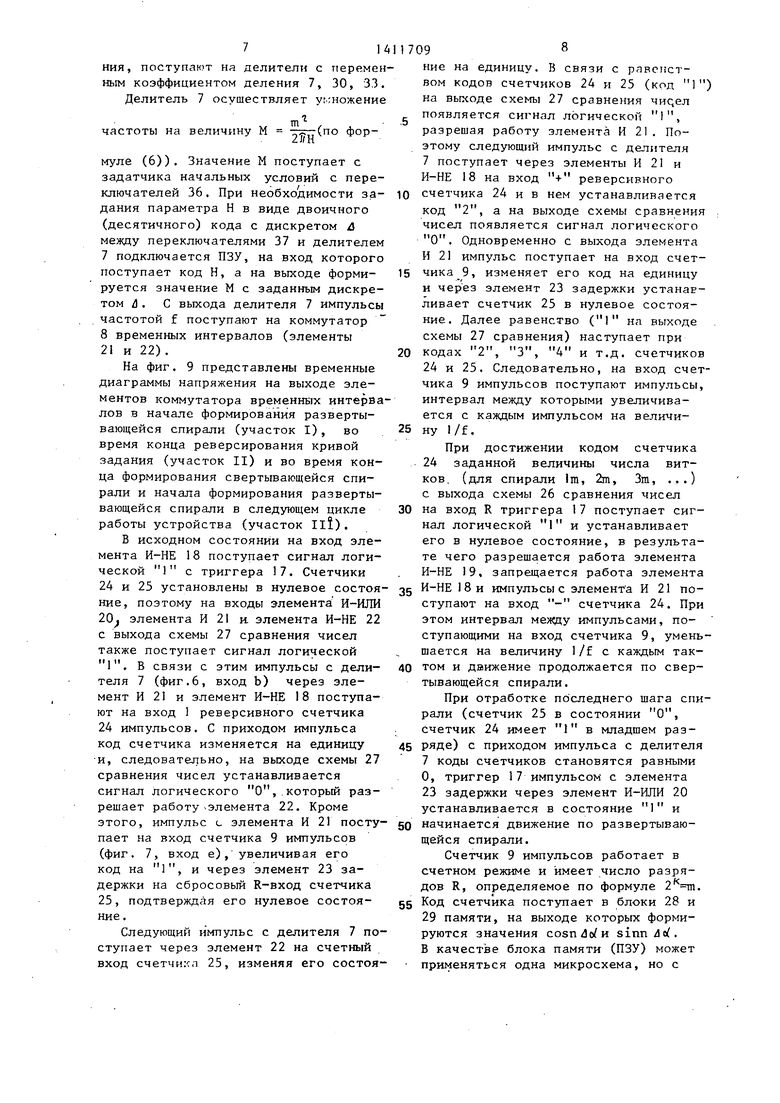
На фиг. 9 представлены временные диаграммы напряжения на выходе элементов коммутатора временных интервалов в начале формирования развертывающейся спирали (участок I), во время конца реверсирования кривой задания (участок II) и во время конца формирования свертывающейся спирали и начала формирования развертывающейся спирали в следующем цикле работы устройства (участок lit).
В исходном состоянии на вход элемента И-НЕ 18 поступает сигнал логической 1 с триггера 17. Счетчики 24 и 25 установлены в нулевое состояние, поэтому на входы элемента И-ИЛИ 20. элемента И 21 и элемента И-НЕ 22 с выхода схемы 27 сравнения чисел также поступает сигнал логической 1, В связи с этим импульсы с делителя 7 (фиг.6, вход Ь) через элемент И 21 и элемент И-НЕ 18 поступают на вход 1 реверсивного счетчика 24 импульсов. С приходом импульса код счетчика изменяется на единицу и, следовательно, на выходе схемы 27 сравнения чисел устанавливается сигнал логического О,.который разрешает работу-элемента 22. Кроме этого, импульс ( элемента И 21 поступает на вход счетчика 9 импульсов (фиг. 7, вход е), увеличивая его код на 1, и через элемент 23 задержки на сбросовый R-вход счетчика 25, подтверждая его нулевое состояние.
Следующий импульс с делителя 7 поступает через элемент 22 на счетный вход счетчи: :л 25, изменяя его состоя98
ние на единицу. В связи с вом кодов счетчиков 24 и 25 (код 1) на выходе схемы 27 сравнения появляется сигнал логической 1, разрешая работу элемента И 21. Поэтому следующий импульс с делителя 7 поступает через элементы И 21 и И-НЕ 18 на вход + реверсивного
счетчика 24 и в нем устанавливается код 2, а на выходе схемы сравнения . чисел появляется сигнал логического О. Одновременно с выхода элемента И 21 импульс поступает на вход счетчика 9, изменяет его код на единицу и через элемент 23 задержки устанавливает счетчик 25 в нулевое состояние. Далее равенство (1 на выходе схемы 27 сравнения) наступает при
кодах 2, 3, 4 и т.д. счетчиков 24 и 25. Следовательно, на вход счетчика 9 импульсов поступают импульсы, интервал между которыми увеличивается с каждым импульсом на величину I/f.
При достижении кодом счетчика 24 заданной величины числа витков, (для спирали 1т, 2т, 3т, ...) с выхода схемы 26 сравнения чисел
на вход R триггера 17 поступает сигнал логической 1 и устанавливает его в нулевое состояние, в результате чего разрешается работа элемента И-НЕ 19, запрещается работа элемента
И-НЕ 18 и импульсы с элемента И 21 поступают на вход - счетчика 24. При этом интервал меаду импульсами, поступающими на вход счетчика 9, уменьшается на величину 1/ с каждым тактом и движение продолжается по свертывающейся спирали.
При отработке пбследнего шага спирали (счетчик 25 в состоянии О, счетчик 24 имеет 1 в младшем разряде) с приходом импульса с делителя
7коды счетчиков становятся равными О, триггер 17 импульсом с элемента 23 задержки через элемент И-ИЛИ 20 устанавливается в состояние 1 и
начинается движение по развертывающейся спирали.
Счетчик 9 импульсов работает в счетном режиме и имеет число разрядов R, определяемое по формуле 2 ш.
Код счетчика поступает в блоки 28 и 29 памяти, на выходе которых формируются значения созп/Зо и sinn/Jc.
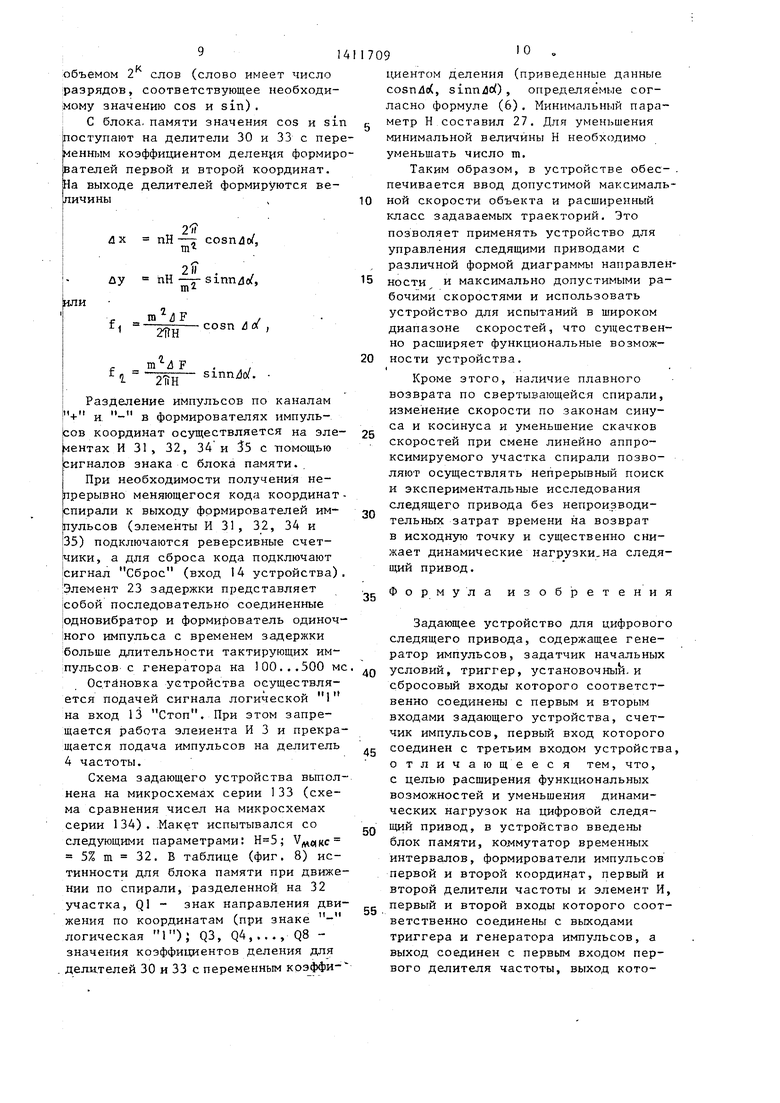
8качестве блока памяти (ПЗУ) может применяться одна микросхема, но с
914
объемом 2 слов (слово имеет число разрядов, соответствующее необходимому значению cos и sin).
С блока, памяти значения cos и sin поступают на делители 30 и 33 с переменным коэффициентом делен 1я формирователей первой и второй координат. На выходе делителей формируются величины
2ff , лх пН-г cosn4tx,
m
лу пН- sinn4(/, или
с , ° 21ТН °
f - m F . . / ,- зшпЛо/.
211Н
I Разделение импульсов по каналам и. - в формирователях импульсов координат осуществляется на элементах И 31 , 32, 34 и 55 с помощью сигналов знака с блока памяти..
При необходимости получения непрерывно меняющегося кода координат спирали к выходу формирователей импульсов (элементы И 31, 32, 34 и 35) подключаются реверсивные счет- гчики, а для сброса кода подключают |сигнал Сброс (вход 14 устройства) :Элемент 23 задержки представляет 1собой последовательно соединенные 1одновибратор и формирователь одиноч iHoro импульса с временем задержки больше длительности тактирующих импульсов с генератора на 100...500 м
Ос.тйновка устройства осуществляется подачей сигнала логической 1 на вход 13 Стоп. При этом запрещается работа элеиента И 3 и прекращается подача импульсов на делитель 4 частоты.
Схема задающего устройства выполнена на микросхемах серии 133 (схема сравнения чисел на микросхемах серии 134). Макет испытывался со следующими параметрами: («с 5% m 32. В таблице (фиг. 8) истинности для блока памяти при движении по спирали, разделенной на 32 участка, Q1 - знак направления движения по координатам (при знаке -
логическая Г ); Q3, Q4,, Q8 значения коэффициентов деления для дел 4телей 30 и 33 с переменным
О
циентом деления (приведенные данные cosn4(, sinndoi) , определяемые согласно формуле (6). Минимальный параметр Н составил 27. Для уменьшения минимальной величины Н необходимо уменьшать число т.
Таким образом, в устрор1стве обес- . печивается ввод допустимой максимальной скорости объекта и расширенный класс задаваемых траекторий. Это позволяет применять устройство для управления следящими приводами с различной формой диаграммы направленности и максимально допустимыми рабочими скоростями и использовать устройство для испытаний в широком диапазоне скоростей, что су1цествен- но расширяет функциональные возможности устройства. I
Кроме этого, наличие плавного возврата по свертывающейся спирали, изменение скорости по законам синуса и косинуса и уменьшение скачков скоростей при смене линейно аппроксимируемого участка спирали позволяют осуществлять непрерывный поиск и экспериментальные исследования следящего привода без непроизводительных затрат времени на возврат в исходную точку и существенно снижает динамические нагрузки,на следящий привод.
35
Формула изобретения
Задающее устройство для цифрового следящего привода, содержащее генератор импульсов, задатчик начальных
условий, триггер, установочный, и
сбросовый входы которого соответственно соединены с первым и вторым входами задающего устройства, счетчик импульсов, первый вход которого
соединен с третьим входом устройства, о тлич ающе е с я тем, что, с целью расширения функциональных возможностей и уменьшения динамических нагрузок на цифровой следящий привод, в устройство введены блок памяти, коммутатор временных интервалов, формирователи импульсов первой и второй координат, первый и второй делители частоты и элемент И,
первый и второй входы которого соответственно соединены с выходами триггера и генератора импульсов, а выход соединен с первым входом первого делителя частоты, выход которого соединен с первыми входами формирователей импульсов первой и второй координат и первым входом второго делителя частоты, выход второго делителя частоты соединен с первым входом коммутатора временных интервалов, выход которого соединен с вторым входом счетчика импульсов, выход которого соединен с входом блока памяти, первый и второй выходы которо го соответственно соединены с вторыми входами формирователе.i импульсов первой и второй координат, выходы которых соответственно под
ключены к первому и второму выходам задающего устройства, первый, второГ) и третий выходы задатчика начальных условий соответственно соединены с вторыми входами первого и второго делителей частоты и коммутатора временных интервалов, третьи входы первого и второго делителей частоты, коммутатора временных интервалов, формирователей импульсов первой и второй координат соединены между собой и с третьим входом задающего устройства.
фиг. 2
/
фиг. 3
т
Фиг. 5
Фиг.
Фиг. 7
| Задающее устройство для цифрового следящего привода | 1978 |
|
SU686018A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Задающее устройство для цифрового следящего привода | 1983 |
|
SU1144088A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
