20
j
39
/
38
36 35
Wi
JJ
Ј1лхял %ю
4 Ю 00 СЛ
7 7J
П я
/7 18
/6,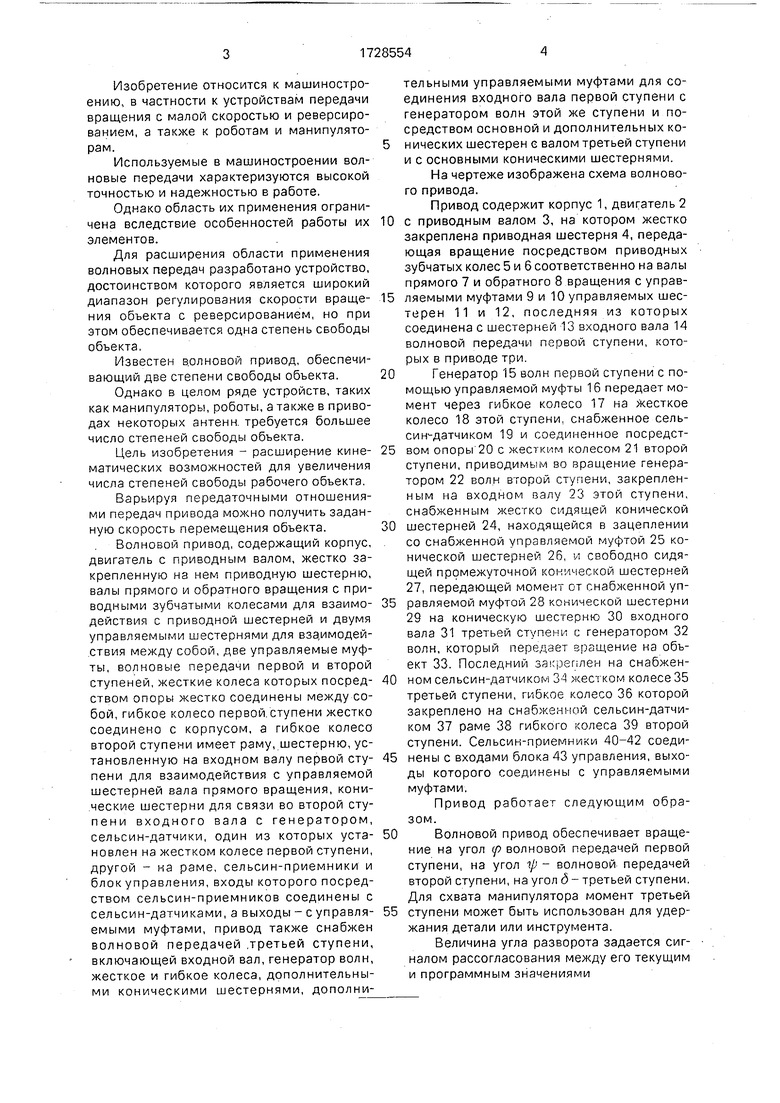
| название | год | авторы | номер документа |
|---|---|---|---|
| Волновой привод | 1988 |
|
SU1525369A1 |
| Волновой привод | 1987 |
|
SU1435866A1 |
| Волновая зубчатая передача | 1990 |
|
SU1747769A1 |
| ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 1998 |
|
RU2136986C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ПРИВОД | 1999 |
|
RU2153108C1 |
| Привод канатно-угольной пилы | 1984 |
|
SU1191577A1 |
| ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2000 |
|
RU2168078C1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| НАГРУЖАЮЩЕЕ УСТРОЙСТВО | 1993 |
|
RU2065593C1 |
| ВОЛНОВАЯ ПЕРЕДАЧА С ПЕРЕКЛЮЧЕНИЕМ ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ | 2019 |
|
RU2751369C1 |
Изобретение относится к машиностроению, в частности к устройствам передачи вращения с малой скоростью и реверсированием, а также к роботам и манипуляторам. Целью изобретения является расширение кинематических возможностей волнового привода за счет увеличения числа степеней свободы рабочего объекта..Для этого привод снабжен волновой передачей третьей ступени, дополнительными коническими шестернями 29 и 30 и дополнительными управляемыми муфтами 16 и 28 для соединения входного вала 14 первой ступени с генератором 15 волн этой же ступени и посредством основйой 27 и дополнительной 30 конических шестерен с валом 31 третьей ступени и основными коническими шестернями 26 и 24. 1 ил.
4J 40
Ш w
Изобретение относится к машиностроению, в частности к устройствам передачи вращения с малой скоростью и реверсированием, а также к роботам и манипуляторам.
Используемые в машиностроении волновые передачи характеризуются высокой точностью и надежностью в работе.
Однако область их применения ограничена вследствие особенностей работы их элементов.
Для расширения области применения волновых передач разработано устройство, достоинством которого является широкий диапазон регулирования скорости враще- ния объекта с реверсированием, но при этом обеспечивается одна степень свободы объекта.
Известен волновой привод, обеспечивающий две степени свободы объекта.
Однако в целом ряде устройств, таких как манипуляторы, роботы, а также в приводах некоторых антенн, требуется большее число степеней свободы объекта.
Цель изобретения - расширение кине- матических возможностей для увеличения числа степеней свободы рабочего объекта.
Варьируя передаточными отношениями передач привода можно получить заданную скорость перемещения объекта.
Волновой привод, содержащий корпус, двигатель с приводным валом, жестко закрепленную на нем приводную шестерню, валы прямого и обратного вращения с приводными зубчатыми колесами для взаимо- действия с приводной шестерней и двумя управляемыми шестернями для вза,имодей- .ствия между собой, две управляемые муфты, волновые передачи первой и второй ступеней, жесткие колеса которых посред- ством опоры жестко соединены между собой, гибкое колесо первой.ступени жестко соединено с корпусом, а гибкое колесо второй ступени имеет раму, шестерню, установленную на входном валу первой сту- пени для взаимодействия с управляемой шестерней вала прямого вращения, конические шестерни для связи во второй ступени входного вала с генератором, сельсин-датчики, один из которых уста- новлен на жестком колесе первой ступени, другой - на раме, сельсин-приемники и блок управления, входы которого посредством сельсин-приемников соединены с сельсин-датчиками, а выходы - с управля- емыми муфтами, привод также снабжен волновой передачей третьей ступени, включающей входной вал, генератор волн, жесткое и гибкое колеса, дополнительными коническими шестернями, дополнительными управляемыми муфтами для соединения входного вала первой ступени с генератором волн этой же ступени и посредством основной и дополнительных конических шестерен е валом третьей ступени и с основными коническими шестернями.
На чертеже изображена схема волнового привода.
Привод содержит корпус 1, двигатель 2 с приводным валом 3, на котором жестко закреплена приводная шестерня 4, передающая вращение посредством приводных зубчатых колес 5 и 6 соответственно на валы прямого 7 и обратного 8 вращения с управляемыми муфтами 9 и 10 управляемых шестерен 11 и 12, последняя из которых соединена с шестерней 13 входного вала 14 волновой передачи первой ступени, которых в приводе три.
Генератор 15 волн первой ступени с помощью управляемой муфты 16 передает момент через гибкое колесо 17 на жесткое колесо 18 этой ступени, снабженное сель- син -датчиком 19 и соединенное посредством опоры 20 с жестким колесом 21 второй ступени, приводимым во вращение генератором 22 волн второй ступени, закрепленным на входном валу 23 этой ступени, снабженным жестко сидящей конической шестерней 24, находящейся в зацеплении со снабженной управляемой муфтой 25 конической шестерней 26, и свободно сидящей промежуточной конической шестерней 27, передающей момент от снабженной управляемой муфтой 28 конической шестерни 29 на коническую шестерню 30 входного вала 31 третьей ступени с генератором 32 волн, который передает вращение на объект 33. Последний закреплен на снабженном сельсин-датчиком 34 жестком колесе 35 третьей ступени, гибкое колесо 36 которой закреплено на снабженной сельсин-датчиком 37 раме 38 гибкого колеса 39 второй ступени. Сельсин-приемники 40-42 соединены с входами блока 43 управления, выходы которого соединены с управляемыми муфтами.
Привод работает следующим образом.
Волновой привод обеспечивает вращение на угол р волновой передачей первой ступени, на угол /. - волновой передачей второй ступени, на угол д третьей ступени. Для схвата манипулятора момент третьей ступени может быть использован для удержания детали или инструмента.
Величина угла разворота задается сигналом рассогласования между его текущим и программным значениями
(fh ; Агр &-грпр; 5т - 5Пр.
Для каждого из представленных законов управления (1)-(3) характерны четыре варианта, которые рассмотрим, например, для угла р
О 180°,
;
180° 360°;
;
Задание направления вращения по углу (р, а также по углам тр и 6 с учетом соотношений (4)-(9) осуществляется блоком 43 управ- ления и обеспечивается в сторону минимального рассогласования между текущим и програмным значениями угла.
Рассмотрим работу привода при изменении угла р. Пусть заданы условия (4) и (5). Тогда блок 43 управления подает сигналы на управляемые муфты 9 и 16 и вращение, создаваемое двигателем 2 от вала 3, через шестерни 4 и 5 передается на вал 7 прямого вращения. Закрепленная на валу 7 муфтой 9 шестерня 12 вращает свободно сидящую шестерню 11 и шестерню 13, закрепленную на валу 14. Муфта 16 подключает генератор 15 волн первой ступени, который через гибкое колесо 17, жестко соединенное с корпусом 1, передает вращение на жесткое колесо 18 и через опору 20, раму 38 и элементы 36 и 35 волновой передачи третьей ступени на объект 33. При этом конические шестерни 26 и 29 свободно сидят на входном валу 14.
Рассмотрим отработку привода закона (1) при условиях (4)и(6). При этом блок 43 управления подает сигналы на муфты 10 и 16. Тогда момент с шестерни 4 через шестерню 6 передается на вал 8 обратного вращения, с которого шестерней 11 через свободно сидящую на валу 7 шестерню 12 - на шестерню 13 вала 14, который вращается
в противоположную по отношению к указанному случаю сторону. Соответственно, объект 33 вращается в противоположную сторону.
5При отработке условий (7)и(8) работа
привода аналогична условиям (4}и(6), а условий (7)и(9) - условиям (4)и(5).
Рассмотрим работу при вода при реализации закона (3). Пусть для справедли10 вы условия (4}и{5). Тогда по сигналам от блока 43 управления включаются в работу муфты 9 и 28, первая из которых передает вращение на входной вал 14, далее через коническую пару 29 и 27 на коническую ше15 стерню 30 входного вала 31 третьей ступени, на котором жестко закреплен генератор 32 волн волновой передачи этой же ступени. Гибким колесом 36 задается вращение жесткого колеса 35 вместе с объектом 33. Если
20 для Дб справедливы условия (4}и(6), то реверс жесткого колеса 35 и объекта 33 достигается за счет подключения муфты 10 вместо муфты 9, а в остальном кинематика аналогична. При соблюдении для усло25 вий (7)и(8) привод работает аналогично условиям (4) и (6), а при условиях (7)и(9) - аналогично условиям (4)и(5).
При движении объекта в соответствии с законом (2), т.е. при работе волновой пере30 дачи второй ступени, исходя из конструк-. тивных особенностей, рама 38, закрепленная на гибком колесе 39, может вращаться относительно жесткого колеса 18 первой ступени на угол допуст, т.е. кругово35 го вращения на 360° в этом случае не обеспечивается, в чем нет практической необходимости. Поэтому по Дт/- возможны условия (5) и (6). При условии (5), т.е. Дip 0 , блок 43 управления включает ты 9 и 25, последняя из которых включает в передачу вращения на вал 23 генератора 22 волн волновой передачи второй ступени коническую пару 26 и 24. При этом жесткое колесо 21 остается неподвижным, а гибкое
45 колесо 39 с рамой 38 обеспечивает перемещение волновой передачи третьей ступени вместе с объектом 33. При Д 0 , т .е. реверсировании вращения, вместо муфты 9 включается муфта 10, а в остальном работа
50 аналогична указанной.
Формула изобретения Волновой привод, содержащий корпус, двигатель с приводным валом, жестко за- 55 крепленную на нем приводную шестерню, валы прямого и обратного вращения с приводными зубчатыми колесами для взаимодействия с приводной шестерней и двумя управляемыми шестернями для взаимодействия между собой, две управляемые муфты, волновые передачи первой и второй ступеней, жесткие колеса которых посредством опоры жестко соединены между собой, гибкое колесо первой ступени жестко соединено с корпусом, а гибкое колесо второй ступени имеет раму, шестерню, установленную на входном валу первой ступени для взаимодействия с управляемой шестерней вала прямого вращения, конические шестерни для связи во второй ступени входного вала с генератором, сельсин-датчики, один из которых установлен на жестком колесе первой ступени, другой - на раме, сельсин-приемники и блок управления, входы которого посредством сельсин0
5
приемников соединены с сельсин-датчиками, а выходы - с управляемыми муфтами, отличающийся тем, что, с целью расширения кинематических возможностей за счет увеличения числа степеней свободы рабочего объекта, привод также снабжен волновой передачей третьей ступени, включающей входной вал, генератор волн, жесткое и гибкое колеса, дополнительными коническими шестернями, дополнительными управляемыми муфтами для соединения входного вала первой ступени с генератором волн этой же ступени и посредством основной и дополнительной конических шестерен с валом третьей ступени и с основными коническими шестернями.
| Гинзбург Е.Г | |||
| Волновая зубчатая передача.-Л.: Машиностроение, 1960 | |||
| Волновой привод | 1987 |
|
SU1435866A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Волновой привод | 1988 |
|
SU1525369A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
