35 3
20 ZZ 28 //
и
I I I
79 б гд /./J
/
и
(Л
30
ел to
СП
00 О5
со
31
35
двух плоскостях. Указанная цель достигается тем, что волновой привод содержит двигатель 2 с приводным валом 1, на котором жестко закреп.тена нривс дная н естерня 5, взаимодействук)111,ая с колесами б и 7 ва- /юв прямого 3 и обратного) 4 вращения, на каждом из которых установлены с кжющью управляющих муфт 12 - 15 шестерни 8-11, гкхпын входной вал 16, коническую пару, две волновые передачи, снабженные сель- сип-датчиками 31 и 32 и с()едпне}щые сельсин-приемниками 33 и 34 с входами управ- .чяюиимо )йства 35, выходы которого соединены с управляемыми муфтами 12 15, зчбчатые ко/к-са вала 4 обратного вращения
через зубчатые колеса вала 3 прямого вращения соединены с промежуточными щестер- нями 24 и 25, одна (25) из которых жестко ссх динена полым входным валом 16 с генератором в(хлн 18 первой волновой передачи, а другая (24) посредством входного вала 17, проходящего через полый входной вал 16, через коническую пару 26 соединена с генератором волн 19 второй передачи, ось враП1,ения которого закреплена подвижно в жестком к лпесе 22 первой волновой передачи, а гибкое колесо 21 второй волновой передачи посредством рамы 29 щарнпрно установлено в жестком колесе 22 и соединено с рабочим (j6i,eKToM 3f). I ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Волновой привод | 1990 |
|
SU1728554A1 |
| Волновой привод | 1987 |
|
SU1435866A1 |
| Манипулятор | 1980 |
|
SU891425A1 |
| Брашпиль | 1977 |
|
SU1058826A1 |
| Брашпиль | 1980 |
|
SU874453A1 |
| Печатная машина глубокой печати | 2013 |
|
RU2616150C2 |
| ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 1998 |
|
RU2136986C1 |
| ЛЕБЕДКА АБРАМОВА | 1992 |
|
RU2094362C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО (ЕГО ВАРИАНТЫ) | 1991 |
|
RU2134003C1 |
| ЛЕБЕДКА (ВАРИАНТЫ) | 1996 |
|
RU2136577C1 |
Изобретение относится к машиностроению и может найти применение при разработке устройств, обеспечивающих медленное вращение объекта с реверсированием. Цель изобретения - расширение кинематических возможностей волнового привода за счет обеспечения вращения рабочего объекта в двух плоскостях. Указанная цель достигается тем, что волновой привод содержит двигатель 2 с приводным валом 1, на котором жестко закреплена приводная шестерня 5, взаимодействующая с колесами 6 и 7 валов прямого 3 и обратного 4 вращения, на каждом из которых установлены с помощью управляющих муфт 12-15 шестерни 8-11, полый входной вал 16, коническую пару, две волновые передачи, снабженные сельсин-датчиками 31 и 32 и соединенные сельсин-приемниками 33 и 34 с входами управляющего устройства 35, выходы которого соединены с управляемыми муфтами 12-15, зубчатые колеса вала 4 обратного вращения через зубчатые колеса вала 3 прямого вращения соединены с промежуточными шестернями 24 и 25, одна (25) из которых жестко соединена полым входным валом 16 с генератором волн 18 первой волновой передачи, а другая (24) посредством входного вала 17, проходящего через полый входной вал 16, через коническую пару 26 соединена с генератором волн 19 второй передачи, ось вращения которого закреплена подвижно в жестком колесе 22 первой волновой передачи, а гибкое колесо 21 второй волновой передачи посредством рамы 29 шарнирно установлено в жестком колесе 22 и соединено с рабочим объектом 30. 1 ил.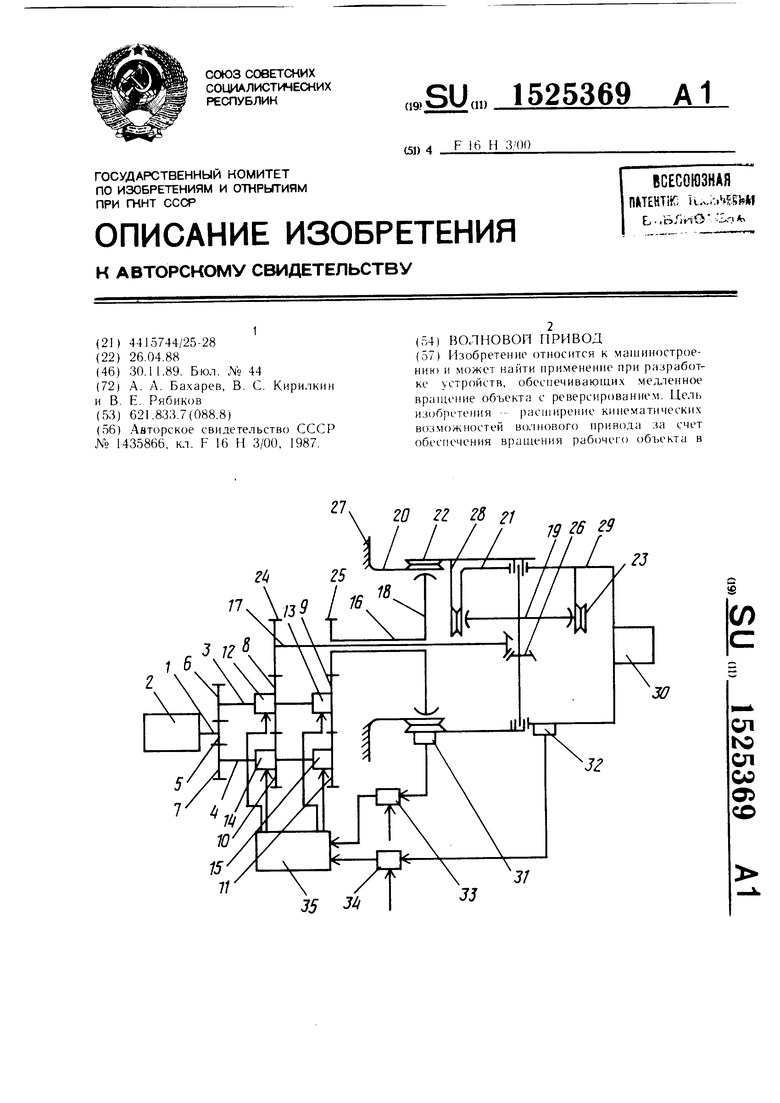
Изоб К те1ще относится к манщиострое- иик), ii частности к устройствам передачи В 1апич1ия с ма/юй скоростью и реверсированием.
Це.п, изобретения раси1ирение кинематических возможрюстей привода за счет ооесиечеиии в)ап1ения рабочего об ьекта к днух плоскостях.
На чс ртеже схематично показан волновой
П)ИВОД.
5о.1повой привод содержит приводной lia. i 1, э.тектродвиг а гель 2, крутяпи1Й мо.мепт па вал 3 прямого и вал 4 обратного вращения, входную П1есте()ию 5, установленную на и|)ив()диом валу 1 и приводные зубчатые ко- ;ieca 6 и 7, установленные соответственно на валах . и 4. На каждом из валов уста- HOB/icHo по паре управляемых uiecTepen: па валу 3 пpямoг(J вращения - 8, 9, а на валу 4 об)атного вращенияИ), 11, которые
cooTiicrcTBCHHO связаны с валами гюсредст- ISOM уп|1авляюпи1х муфт 12-15, при этом управляемая шестерня 8 взаимодействует с нкч терней 10. а управляемая п естерня 9 с И1есте|)пей I 1.
того, привод содержит две вол- HOBijie передачи первой и второй ступепп, каждая из которых и.меет по входному валу 16 и 17, на кс торых установлены ге)1ерато- ры 18 и 19 волн, гибкому 20 и 21 и жестком) 22 и 23 колесу. Входной вал 16 волновой передачи первой ступепи выполнен полым и виут)и него проходит входной вал 17 во. I новой 11е()едачи второй ступепи, а па обоих входных валах 16 и 17 установлены иромеж точ1п 1е И1естерпи 24 и 25, соответ- стнеппо взапмодействукмцие с управляемыми шестернями 8 и 9, установленными на ва- ,1 3 njniMoro врап1епия. Входной вал 17 вол- HOBoii пе)едачи ггорой ступени связан с ее )OM во.чп 19 через коническую иаГибкое колесо 20 волновой передачи первой стуиепи жестко соединено с корпусом 27, а ее жесткое колесо 22 жестко связано с жестким колесом 23 волновой передачи вто- 5 рой ступепи посредством опоры 28. Гибкое колесо 21 установлено н арнирно в жестком Ko. iece 22 и имеет раму 29, на которой крепится рабочий объект 30.
Волновой привод содержит электросхему, включак)П1ую в себя два сельсип-датчи- 0 ка 31 и 32, устаповленные соответственно на жестком колесе 22 волновой передачи первой ступени и раме 29. Каждый сельсин-датчик связан с соответствующи.м сельсип-при- емником 33 и 34, соединенными с входами блока 35 управления, выходы KOTopoi o соединены с соответствуюн ими управляющи.ми муфтами 12 - 15.
Волновой привод работает следующим образом.
Привод обеспечивает разворот рабочего 0 обтл кта 30 в двух плоскостях: на уг ол f волновой передачей первой ступени и на уг ол f волновой передачей второй ступени .
Величина угла разворота задается сигна5
лом рассогласования между его текущим и
программным значениями: vpT , tfnp и Ут.Глр- Рассмотрим работу привода при из.мене- нии угла vf . Причем в этом случае воз.мож- Н1)1 два варианта, каждый из которых распадается на 2 подварианта, когда О Ai
fr -ф„рИ4(/) .
Рассмотрим .первый вариант, когда 180° и . Тогда блок 35 управления подает сиг нал на управляющую муфту 13 и врап1ение от приводного вала 1 через вал 3 прямого вращения передается щестерней 9
па входной вал 16 и затем на генератор 18 волн первой волновой передачи, гибкое колесо 20 которой неподвижно, а жесткое колесо 22 через вторую волновую передачу
соединено с рабочим объектом 30, причем сельсин-датчик 31 будет регистрировать угол разворота а . Кроме того, за счет вращения второй передачи коническая пара 26 приведет во вращение вал 17 и свободно сидящие щестерни 8 и 10.
Если 180° , то но сигналу от блока 35 унраачения в работу включается на полый вал 14 и далее аналогично. Особенность нри этом состоит в том, что на- личие свободно сидящей щестерни 9 нозво- .чяет реверсировать вращение рабочего объекта 30.
Второй вариант, когда 180°- /Vr fnfl 360°, случай соответствует случаю рассмотренному выще, при Д vj) «СО и наоборот.
При рассмотрении врап1ения объекта 30 на угол tf , исходя из конструктивных особенностей, рама 29, закрепленная на гибком ко- лесе 21, .может врап1аться относительно жесткого колеса 22 первой передачи на угол При начале отсчета от одного из крайних положений объекта 30 отметим, что круговою вращения на 360° в этом случае не обеспечивается, в чем нет и практической необходимости. При вращении на угол возможны 2 варианта:
I )г -fnp - необходимо врап1ать объект в одну сторону;
2) (/ -Vnf - объект вращается в про- тивоноложную от 1-го варианта сторону.
Пусть , тогда вращение с приводного вала 1 через вал 3 прямого враи1,ения при включении управ.1яющей муфты 12 через И1естерню 8 передается вало.м 17 и конической парой 26 на генератор волн 19 вто- рой волновой передачи, неподвижное крепление жесткого колеса 23 которой относительно оси вращения генератора волн 19 обеспечивает вращение гибкого колеса 21 совместно с объектом 30 и рамой 29, на которой установлен сельсин-датчик 32, фор- мируюи1ий сигнал у.
При О, Т.е. необходимости pL Bcpca, вращение с вала 1 через вал обратного вращения 4 при включении унрав.пяемой муфты 14 щестерней 8 передается на вал 17. который в отличие от рассмотренного выпю случая будет вращаться в противопсхюжную сторону, т.е. объект будет вращаться также в противоположную сторону.
Таким образом, указанное конструктивное исполнение волнового привода позволяет при наличии одного электродви1-ателя
0
0
5
0
обеспечивать разворот рабочего об ьект.1 в двух плоскостях.
Формула пзобрстснич
Волновой привод, соде|1жан1ий ко|1п с. д и1ате,тьс приводным валом, lia.ibi npHMoid и обратного вращения, нару ун|1ав.)Г пюстерен, установ.ченньгх на на. 1 прямого вращения, две пары управляющих Myijvr. одна из которых установ,1ена на ва.1 прямо- г о вра1пения и связана с соот етствун)П1ей парой управляемых 1иестерен, волнов1.|е передачи пе|)вой и второй ступени, и.меклиие генераторы волн, и жесткие и г ибкие Ko. ie са, два вход)1ых вала, связанные с соответствующими генераторами волн, устаиов,пенную на входном валу волново нередачи первой ступени промежуточную П1естернк), рабочий объект и э,пектросхему привода, вк, 1ючаюп1ую встроенные в нее се,пьс1П1-дат- чик, сельсин-приемник и блок управления муфтами, отличающийся тем, что, с пе.чью рас HI и рения кинематических возможностей за счет обеспечения вра1иения рабочег о екта в двух п,тоскостях, привод снабжен входной 1нестерней, установленной па нривод- ном ва.ту, двумя }1риводными зубчатыми колесами, установленными соответственно на валах прямого и обратного вран1енпя для взаимодействия с входной И1ест1 )11ей, до- по, 1Н1П е, 1Ьной парой управляем1,1Х шестереп для взаимодействия с основной парой и па- poii у||рав,1яюпи1х муфт, установленн1,1х п.ч ва,1у обратного враи1ения и связанных с до- но.шительной нарой управ,тяемых П1есте|Н п. и установленной па входпом Ba. iy во,-1новой передачи второй CTyneini .lono.innTe.ibiioii промежуточной шестерней д.1я изанмодейс т- иия с соответствующей управлиемо1( шестерней, устано),1енной на валу прямого вращения конической парой, связ1)1вающей вход- noi f В.1Л с генератором в во,-1Н()Е()й передаче второй ступепи, рамой, соединяющей гибкое колесо BcxTHOBoii передачи второй ступени с рабочим объектом и установ. К ННой П1арни)но в гибком колесе BO.IHOBOII передачи первой ступс ни исгроенн1)1мп в :.1ектро- схему доп)лнпте.1ьпыми се. п.син-приемником и сельсин-датчиком, ста нов.н нным на раме. на.1 BT()|ioii cTynetni сганов.1ен ри входного ва,1а первой, жесткое Ko. ieco В0.1НОВОЙ передачи первой ciynenn. на кою- ром установ.И н основной сел1 спн-дагчпк, и.меет опору, жестко связанную с IHI-CTKHM Ko.iecoM второй стунени, а гибкое Ko.ieco волновой передачи riepBoii ступепи жесгко снязапо с корпусом.
| Волновой привод | 1987 |
|
SU1435866A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
