ел
Си

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ приведения главной оси гирокомпаса в меридиан | 1973 |
|
SU469888A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КУРСА ОБЪЕКТА И САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОУКАЗАНИЯ | 2000 |
|
RU2186338C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО АЗИМУТА СИСТЕМОЙ САМООРИЕНТИРУЮЩЕЙСЯ ГИРОСКОПИЧЕСКОЙ | 2009 |
|
RU2407989C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА В СИСТЕМАХ НАВИГАЦИИ, ТОПОПРИВЯЗКИ, НАВЕДЕНИЯ И ПРИЦЕЛИВАНИЯ (ВАРИАНТЫ) | 2001 |
|
RU2184936C1 |
| СПОСОБ ПРИВЕДЕНИЯ ГЛАВНОЙ ОСИ ГИРОКОМПАСА | 1973 |
|
SU364844A1 |
| ГИРОКОМПАС | 2015 |
|
RU2611575C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| ГИРОКОМПАС | 2007 |
|
RU2339910C1 |
Изобретение относится к гироскопической технике и может быть использовано в гирокурсоуказателях для автономной ускоренной выставки главной оси гирокомпаса в плоскость меридиана. Цель изобретения - уменьшение времени процесса приведения с заданной точностью. Это обеспечивается повторением циклов приведения до тех пор, пока в результате измерений времени каждого интервала знакопостоянства управления четыре раза подряд будут зафиксированы интервалы с продолжительностью по времени, меньшей величины, соответствующей требуемой точности приведения. 2 ил.
Изобретение относится к области гироскопической техники.
Известен способ приведения главной оси гирокомпаса в меридиан под действием демпфирующего и маятникового моментов, обеспечивающих затухающие колебания главной оси относительно установившегося положения, причем период колебаний выбирается меньшим, чем период гирокомпаса в режиме ГК (гирокомпасирования).
Известен способ приведения главной оси гирокомпаса в меридиан, в котором переключение и отключение управления на втором интервале определяются по запомненному максимальному углу рассогласования вектора кинетического момента от плоскости горизонта - углу /3.
Этот способ не гарантирует заданную точность приведения, так как не предусмотрена реализация повторных циклов приведения.
Известен также способ приведения главной оси гирокомпаса в меридиан, включающий измерение угла рассогласования положения главной оси относительно плоскости горизонта, приложение по горизонтальной оси подвеса гироскопа релейного управляющего момента, изменение знака управляющего момента первого интервала знакопостоянства при совпадении угла рассогласования с углом, определяемым по функции соответствия угла переключения экстремальному углу рассогласования, отключение показаний счетчика времени после второго интервала знакопостоянства управления с величиной интервала времени, определяемой по функции соответствия времени второго интервала приведения экстремальному углу рассогласования, обнуление запомненного экстремального значения угла рассогласования и счетчика времени после отключения управления на
VJ
ю
00
jo о го
втором интервале и повторение цикла приведения.
Задача приведения главной оси гирокомпаса в меридиан с заданной точностью считается выполненной, если в момент окончания процесса приведения главной оси гирокомпаса находится в заданной области точности: а «з, |Д| Дз. В известном способе циклы приведения повторяются до достижения заданной точности приведения по координате Дт. е. процесс приведения заканчивается и управление отключается при условии, что в момент окончания цикла выполняется условие I/3I /5з.Однако при этом не гарантируется приведение гирокомпаса в зону точности по координате а. Гирокомпас будет находиться в зоне точности по «лишь при условии, что при свободном движении гироскопа в течение интервала времени, равного половине периода свободных колебаний гироскопа координата I/5I не превысит величины Дз. То есть для известного способа процессы приведения с заданной точностью по координатам а И/J затягиваются на время, равное половине периода гирокомпаса, что составляет сорок и более минут для гирокомпасов ГКУ-2 и ВЕГА.
Цель изобретения - сокращение времени приведения при обеспечении требуемой точности.
Поставленная цель достигается тем, что согласно способу, включающему измерение угла рассогласования положения главной оси гирокомпаса относительно плоскости горизонта, приложение по горизонтальной оси подвеса гирокомпаса релейного управляющего момента, измерение экстремального угла рассогласования и изменение знака управляющего момента первого интервала управления при совпадении угла рассогласования с углом, определяемым по функции соответствия угла переключения экстремальному углу рассогласования, снятие управляющего момента при равенстве времени второго интервала управления величине, определяемой по функции соответствия времени второго интервала управления экстремальному углу рассогласования, и повторение циклов управления до приведения главной оси гирокомпаса в меридиан, измеряют время каждого интервала управления и заканчивают повторение циклов приведения при достижении у не менее четырех последовательных интервалов управления продолжительности по времени, меньшей величины, соответствующей требуемой точности приведения.
и
0
5
0
5
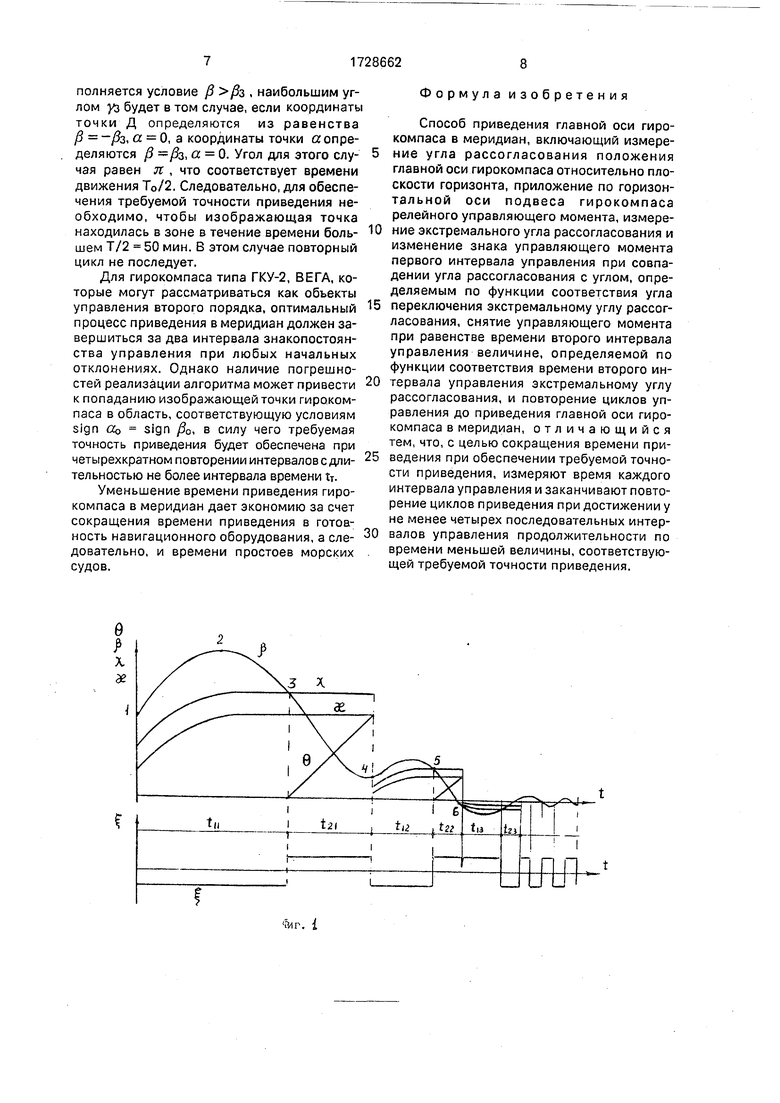
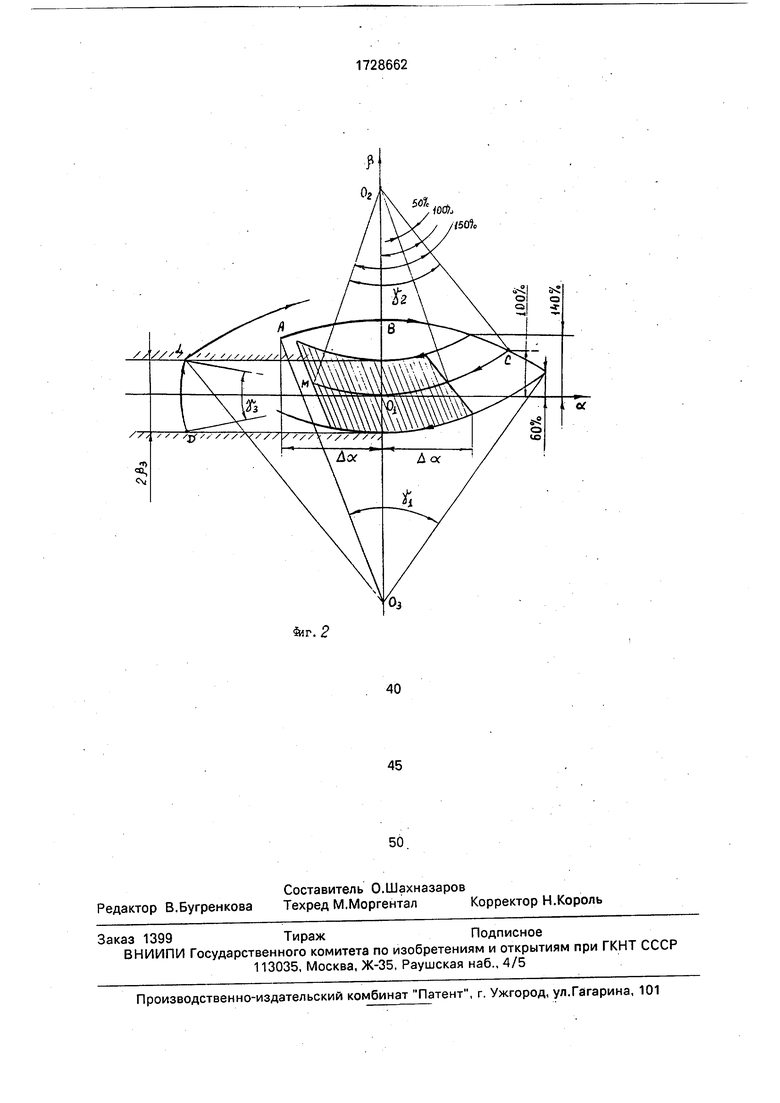
На фиг. 1 представлены графики процесса начальной выставки главной оси гирокомпаса в меридиан по предлагаемому способу, на которых приведено изменение во времени переменных гирокомпаса и регулятора; на фиг. 2 -схема процесса начальной выставки главной оси гирокомпаса в меридиан.
Способ осуществляется следующим образом.
При начальной выставке главной оси гирокомпаса измеряют угол /5-угол рассогласования положения главной оси относительно плоскости горизонта, и прикладывают управляющий момент по горизонтальной оси подвеса гироскопа со знаком, обратным знаку угла ft. При этом измеряют экстремальное отклонение угла рассогласования Дт и определяют величину угла переключения Дп и время второго интервала to по функциям их соответствия экстремальному отклонению угла рассогласования (Для случая отсутствия демпфирования у гирокомпаса),
в2т+2Ј 6т .
(m)
4е
30
35
40
45
50
55
to f2 (Дп) g arccos 1 - 1Д, I,
где Т - период собственного движения компаса;
е- величина безразмерного управляющего момента.
Измеряют и фиксируют продолжительность первого интервала знакопостоянства управления tn до момента t2 to, в который изменяют знак управляющего момента и включают счетчик времени т,2.
Измеряют и фиксируют продолжительность второго интервала управления t2i до момента t2 to, в который выключают управляющий момент, обнуляют показания счетчика времени и. величину запомненного экстремального отклонения Дп .
Повторяют приведение и фиксируют времена ti2 и т.22 (где первой и второй цифрами обозначены соответственно номер интервала и номер цикла) для второго цикла приведения, а затем при третьем цикле приведения фиксируют времена из и t23 и так дальше.
Повторяют приведение до тех пор, пока в последовательности величин tn, t2i, ti2, t22, ti3, t23 ... не повторится четыре раза подряд величина интервалов с продолжительностью по времени меньшей, чем величина соответствующей требуемой точности приведения.
Ниже приводится один из возможных алгоритмов реализации способа
полняется условие / Дз. наибольшим углом уз будет в том случае, если координаты точки Д определяются из равенства Р -Дз, а 0, а координаты точки «определяются {3 Дз, а 0. Угол для этого случая равен тс , что соответствует времени движения То/2. Следовательно, для обеспечения требуемой точности приведения необходимо, чтобы изображающая точка находилась в зоне в течение времени большем Т/2 50 мин. В этом случае повторный цикл не последует.
Для гирокомпаса типа ГКУ-2, ВЕГА, которые могут рассматриваться как объекты управления второго порядка, оптимальный процесс приведения в меридиан должен завершиться за два интервала знакопостоян- ства управления при любых начальных отклонениях. Однако наличие погрешностей реализации алгоритма может привести к попаданию изображающей точки гирокомпаса в область, соответствующую условиям sign OQ sign , в силу чего требуемая точность приведения будет обеспечена при четырехкратном повторении интервалов с дли тельностью не более интервала времени tj.
Уменьшение времени приведения гирокомпаса в меридиан дает экономию за счет сокращения времени приведения в готовность навигационного оборудования, а следовательно, и времени простоев морских судов.
и
,.
Формула изобретения
Способ приведения главной оси гирокомпаса в меридиан, включающий измере- 5 ние угла рассогласования положения главной оси гирокомпаса относительно плоскости горизонта, приложение по горизонтальной оси подвеса гирокомпаса релейного управляющего момента, измере- 10 ние экстремального угла рассогласования и изменение знака управляющего момента первого интервала управления при совпадении угла рассогласования с углом, определяемым по функции соответствия угла
15 переключения экстремальному углу рассогласования, снятие управляющего момента при равенстве времени второго интервала управления величине, определяемой по функции соответствия времени второго ин- 20 тервала управления экстремальному углу рассогласования, и повторение циклов управления до приведения главной оси гирокомпаса в меридиан, отличающийся тем, что, с целью сокращения времени при25 ведения при обеспечении требуемой точности приведения, измеряют время каждого интервала управления и заканчивают повторение циклов приведения при достижении у не менее четырех последовательных интер- 30 валов управления продолжительности по времени меньшей величины, соответствующей требуемой точности приведения.
| Авторское свидетельство СССР №828816, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
