Изобретение относится к подъемно- транспортному оборудованию а именно к манипуляторам, предназначенным для по- грузочно-разгрузочных работ и управляемым вручную с помощью устройства, установленного на конце шарнирной стрелы и задающего приводу манипулятора соответствующие скорости перемещения. Подобные манипуляторы применяются в промышленности для загрузки станков заготовками, съема обработанных деталей, складских операций, обслуживания прессов и другого технологического оборудования.
Целью изобретения является повышение безопасности работы манипулятора.
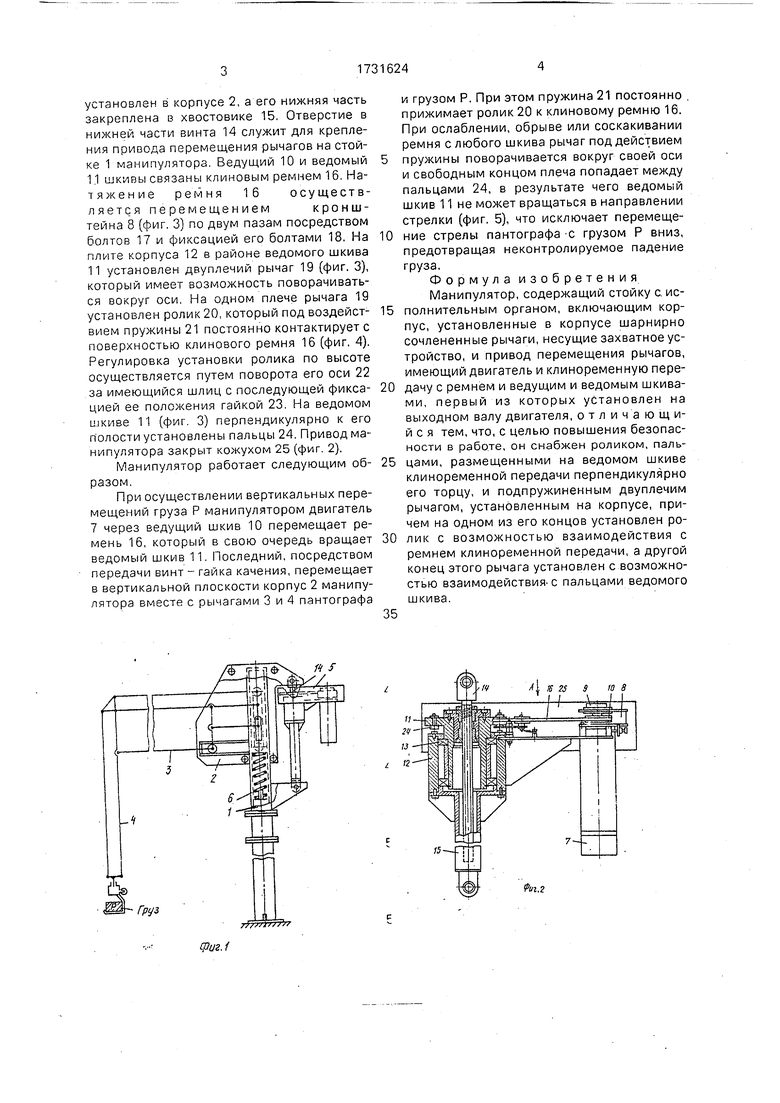
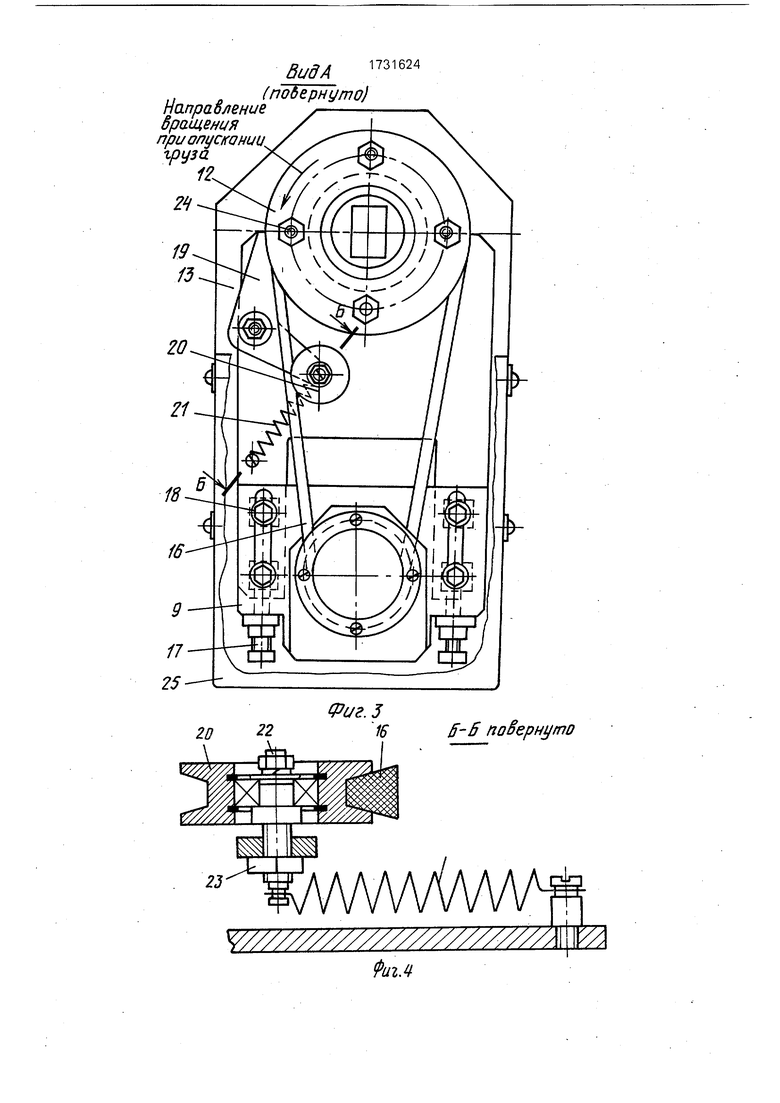
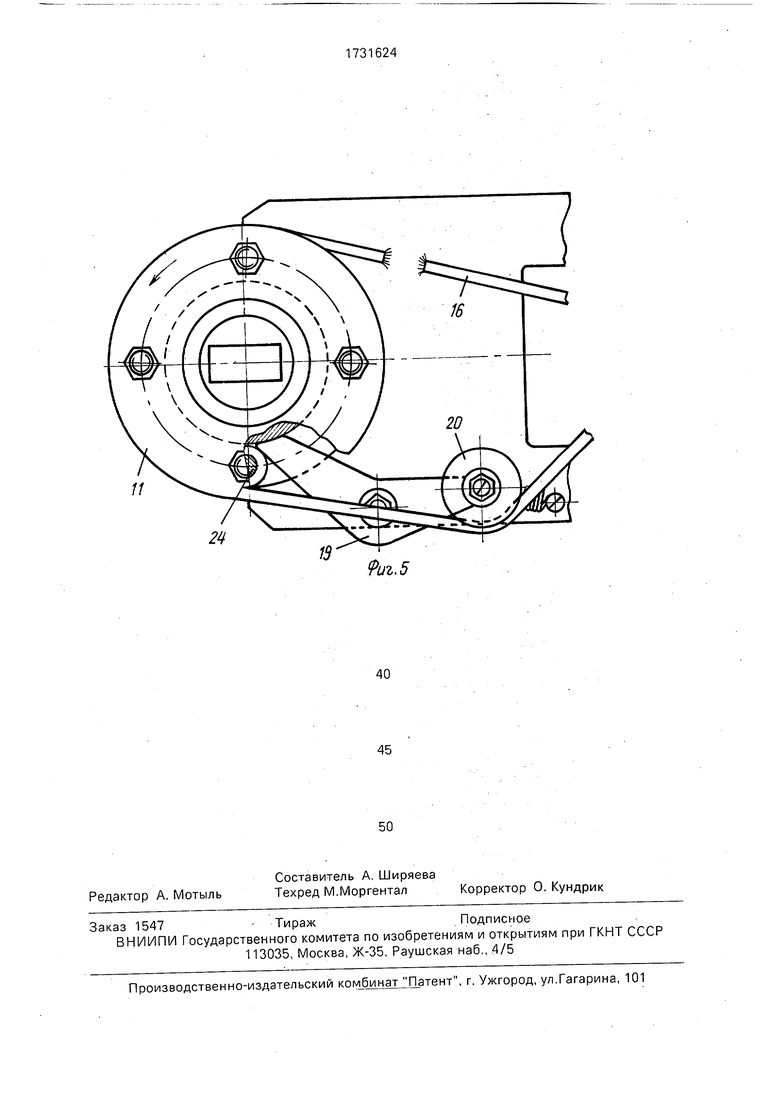
На фиг. 1 изображен манипулятор, общий вид, на фиг. 2 - привод манипулятора; на фиг, 3 - вид А на фиг, 2; на фиг, 4 - разрез Б-Б на фиг. 3; на фиг. 5 - схема положения привода при обрыве клинового ремня.
Манипулятор содержит стойку 1 и исполнительный орган, включающий корпус 2 (фиг 1) с шарнирно-сочлененными рычагами 3 и 4, образующими стрелу - пантограф и привод 5 перемещения этих рычагов, расположенный в задней части манипулятора и закрепленный на стойке 1. Внутри стойки установлена уравновешивающая пружина 6. Привод 5 перемещения рычагов 3 и 4 состоит из двигателя 7 (фиг. 2), закрепленного на кронштейне 8 вместе с тормозом 9, клиноременной передачи, ведущий шкив 10 которой установлен на выходном валу двигателя 7 и подъемно-опускного-механизма, выполненного в виде, например, передачи винт- гайка качения, гайки которой запрессованы во втулку, установленную в ведомом шкиве 11, который размещен с возможностью вращения в корпусе 12 на подшипниках 13. Винт 14 передачи винт - гайка
установлен в корпусе 2, а его нижняя часть закреплена в хвостовике 15. Отверстие в нижней, части винта 14 служит для крепления привода перемещения рычагов на стойке 1 манипулятора. Ведущий 10 и ведомый 11 шкивы связаны клиновым ремнем 16. На- т я ж е н и е ремня 16 осуществляется перемещениемкронштейна 8 (фиг. 3) по двум пазам посредством болтов 17 и фиксацией его болтами 18. На плите корпуса 12 в районе ведомого шкива 11 установлен двуплечий рычаг 19 (фиг. 3), который имеет возможность поворачиваться вокруг оси, На одном плече рычага 19 установлен ролик 20, который под воздейст- вием пружины 21 постоянно контактирует с поверхностью клинового ремня 16 (фиг. 4). Регулировка установки ролика по высоте осуществляется путем поворота его оси 22 за имеющийся шлиц с последующей фикса- цией ее положения гайкой 23. На ведомом шкиве 11 (фиг 3) перпендикулярно к его полости установлены пальцы 24. Привод манипулятора закрыт кожухом 25 (фиг 2).
Манипулятор работает следующим об- разом.
При осуществлении вертикальных перемещений груза Р манипулятором двигатель 7 через ведущий шкив 10 перемещает ремень 16, который в свою очередь вращает ведомый шкив 11. Последний, посредством передачи винт - гайка качения, перемещает в вертикальной плоскости корпус 2 манипулятора вместе с рычагами 3 и 4 пантографа
и грузом Р. При этом пружина 21 постоянно прижимает ролик 20 к клиновому ремню 16. При ослаблении, обрыве или соскакивании ремня с любого шкива рычаг под действием пружины поворачивается вокруг своей оси и свободным концом плеча попадает между пальцами 24, в результате чего ведомый шкив 11 не может вращаться в направлении стрелки (фиг. 5), что исключает перемещение стрелы пантографа с грузом Р вниз, предотвращая неконтролируемое падение груза,
Формула изобретения Манипулятор, содержащий стойку с исполнительным органом, включающим корпус, установленные в корпусе шарнирно сочлененные рычаги, несущие захватное устройство, и привод перемещения рычагов, имеющий двигатель и клиноременную передачу с ремнем и ведущим и ведомым шкивами, первый из которых установлен на выходном валу двигателя, отличающийся тем, что, с целью повышения безопасности в работе, он снабжен роликом, пальцами, размещенными на ведомом шкиве клиноременной передачи перпендикулярно его торцу, и подпружиненным двуплечим рычагом, установленным на корпусе, причем на одном из его концов установлен ролик с возможностью взаимодействия с ремнем клиноременной передачи, а другой конец этого рычага установлен с возможностью взаимодействия-с пальцами ведомого шкива.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СМАТЫВАНИЯ В БОБИНЫ И РАСКЛАДКИ ГИБКИХ ПОЛИВНЫХ ТРУБОПРОВОДОВ СИСТЕМЫ КАПЕЛЬНОГО ОРОШЕНИЯ | 2009 |
|
RU2435366C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1992 |
|
RU2057670C1 |
| Привод кругловязальной машины | 1979 |
|
SU821575A1 |
| Автоматический клиноременный вариатор скорости | 1989 |
|
SU1758316A1 |
| УСТРОЙСТВО ДЛЯ СМАТЫВАНИЯ В БОБИНЫ И РАСКЛАДКИ ГИБКИХ ПОЛИВНЫХ ТРУБОПРОВОДОВ СИСТЕМЫ КАПЕЛЬНОГО ОРОШЕНИЯ | 2009 |
|
RU2395957C1 |
| Клиноременный вариатор | 1983 |
|
SU1087724A1 |
| Устройство для нанесения клея на листовой материал | 1985 |
|
SU1348177A1 |
| РЕМЕННАЯ МНОГОПОТОЧНАЯ ПЕРЕДАЧА | 1991 |
|
RU2009385C1 |
| Двухвалковая дробилка | 1979 |
|
SU902805A1 |
| Машина для обработки стеклоизделий | 1977 |
|
SU941324A1 |
Использование: автоматизация погру- зочно-разгрузочных работ в машиностроении. Сущность изобретения: манипулятор содержит стойку и исполнительный орган, включающий корпус, шарнирно-сочленен- ные рычаги с захватным устройством и с приводом их перемещения. Привод перемещения рычагов включает двигатель, на вы ходном валу которого установлен ведущие шкив клиноременной передачи, а ведомые шкив этой передачи снабжен пальцами, раз мещенными перпендикулярно торцу ведо мого шкива. Корпус имеет двуплечи) подпружиненный рычаг с роликом на одногч его конце, который постоянно контактируе с ремнем клиноременной передачи. При ос лаблении, обрыве или соскакивании ремн$ с любого из шкивов подпружиненный дву плечий рычаг под действием пружины поворачивается вокруг своей оси и вторым CBOHN концом попадает между пальцами ведомого шкива, в результате чего ведомый шкив не может вращаться, что исключает перемещение стрелы пантографа с грузом Р вниз, предотвращая неконтролируемое падение груза.5 ил. СП С
Фигл
Направление Вращения при опускании груза
ВидА (подернуто)
1
VZ /7/////////
ФиъЛ
1731624
//
24
иг,5
| Манипулятор | 1978 |
|
SU679385A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
