Фиг 1
никает планетарное движение катящегося полого ротора 4. При этом сателлиты 5 двух планетарных механизмов, передающих каждый половину суммарного силового потока, образуют зубчатое зацепление с цент- ральными зубчатыми колесами 11 и вызывают медленное вращение ведомого звена 1, с которым жестко связаны колеса
11.Дополнительная кинематическая цепь
12,связывающая сателлиты 5 планетарных
механизмов с дисками 13, определяет наличие планетарного движения ротора 4. При этом эксцентриковая ось 6 за счет жесткой связи с датчиком 9 системы управления позволяет определять положение ведомого звена 1 относительно ведущего звена 2. Управляемый тормоз 10 позволяет стопорить ведомое звено 1 относительно ведущего звена 2 в заданном положении. 4 з.п. ф-лы, 4 ил.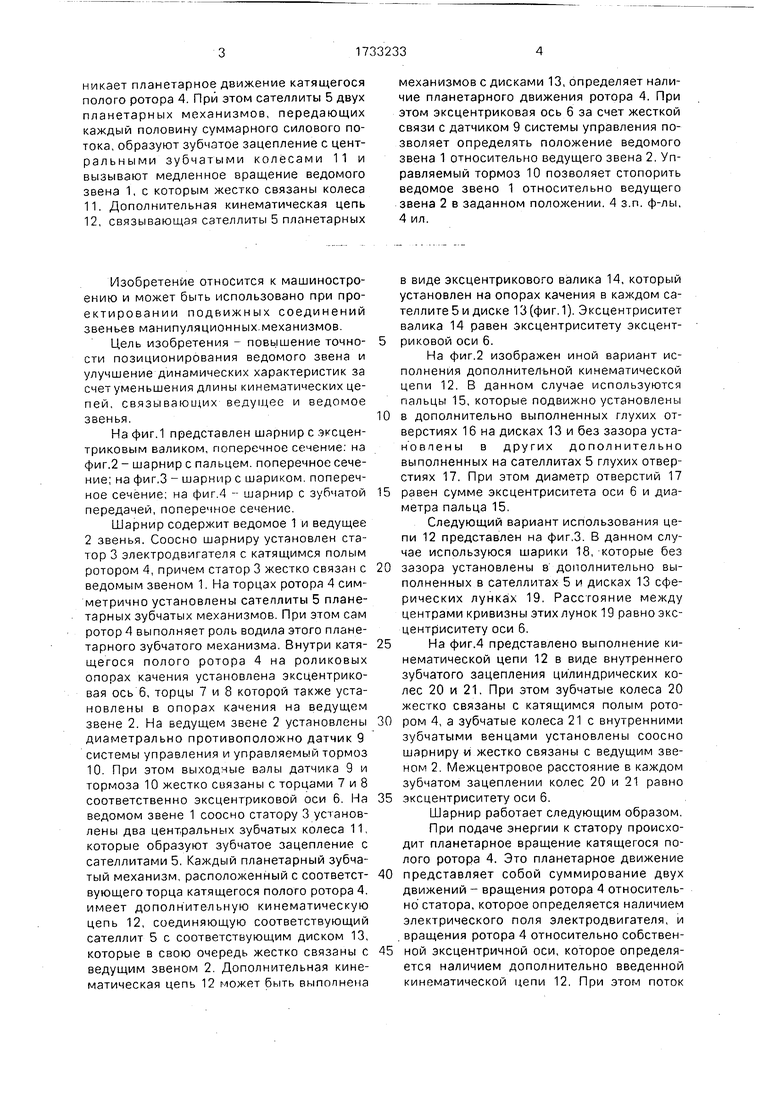
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ДЛЯ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2156902C1 |
| Электропривод арматуры | 1990 |
|
SU1747790A1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| ПЛАНЕТАРНЫЙ ЭЛЕКТРОМОТОР-РЕДУКТОР | 2005 |
|
RU2294587C1 |
| ПЛАНЕТАРНЫЙ ТОРЦОВЫЙ МОТОР-РЕДУКТОР | 1998 |
|
RU2150623C1 |
| УРАВНОВЕШЕННЫЙ САМОУСТАНАВЛИВАЮЩИЙСЯ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2009 |
|
RU2397384C1 |
| Зубчато-рычажный механизм для привода больших масс | 1985 |
|
SU1265420A1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820105A1 |
Изобретение относится к машиностроению и может быть использовано при проектировании подвижных соединений звеньев манипуляционных механизмов Целью изобретения является повышение точности позиционирования ведомого звена и улучшение динамических характеристик за счет уменьшения длины кинематических цепей, связывающих ведущее и ведомое звенья При подаче з,нер| ии к статору 3 воз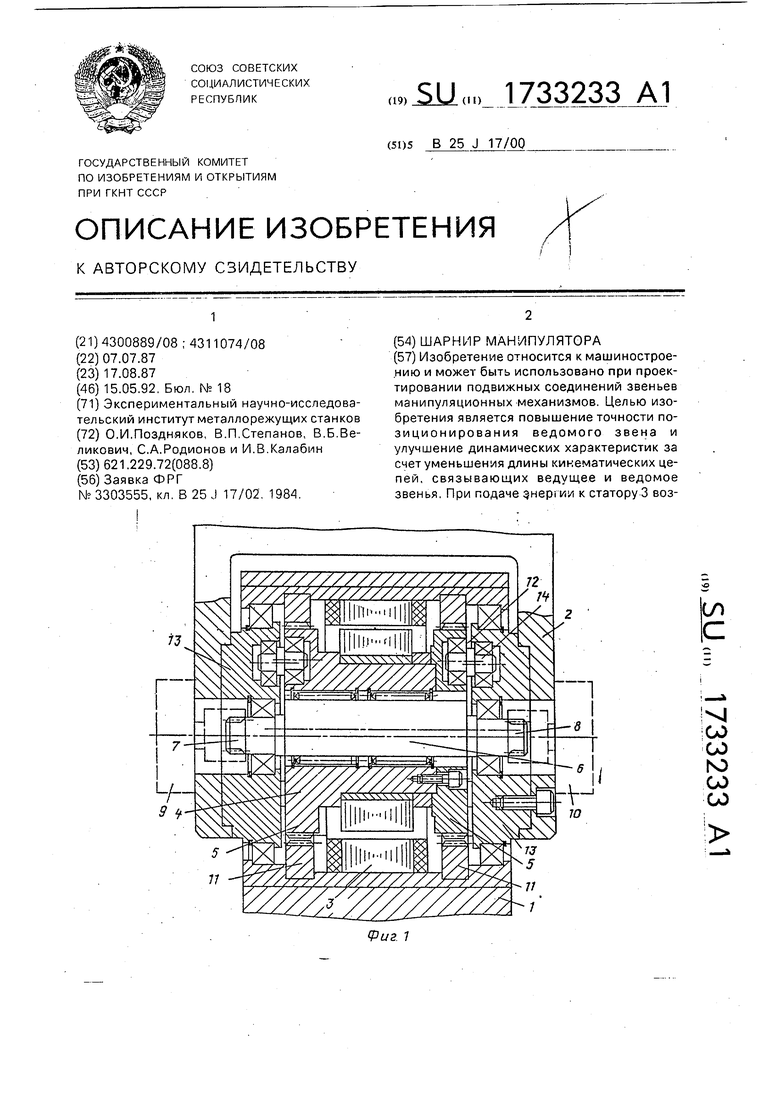
Изобретение относится к машиностроению и может быть использовано при проектировании подвижных соединений звеньев манипуляционных механизмов.
Цель изобретения - повышение точности позиционирования ведомого звена и улучшение динамических характеристик за счет уменьшения длины кинематических цепей, связывающих ведущее и ведомое звенья.
На фиг.1 представлен шарнир с эксцентриковым валиком, поперечное сечение: на фиг.2 - шарнир с пальцем, поперечное сечение; на фиг.3 - шарнире шариком поперечное сечение, на фиг.4 - шарнир с зубчатой передачей, поперечное сечение.
Шарнир содержит ведомое 1 и ведущее 2 звенья. Соосно шарниру установлен статор 3 электродвигателя с катящимся полым ротором 4, причем статор 3 жестко связан с ведомым звеном 1. На торцах ротора 4 симметрично установлены сателлиты 5 планетарных зубчатых механизмов. При этом сам ротор 4 выполняет роль водила этого планетарного зубчатого механизма. Внутри катящегося полого ротора 4 на роликовых опорах качения установлена эксцентриковая ось 6, торцы 7 и 8 которой также установлены в опорах качения на ведущем звене 2. На ведущем звене 2 установлены диаметрально противоположно датчик 9 системы управления и управляемый тормоз 10. При этом выходные валы датчика 9 и тормоза 10 жестко связаны с торцами 7 и 8 соответственно эксцентриковой оси 6. На ведомом звене 1 соосно статору 3 установлены два центральных зубчатых колеса 11, которые образуют зубчатое зацепление с сателлитами 5. Каждый планетарный зубчатый механизм, расположенный с соответствующего торца катящегося полого ротора 4. имеет дополнительную кинематическую цепь 12, соединяющую соответствующий сателлит 5 с соответствующим диском 13, которые в свою очередь жестко связаны с ведущим звеном 2. Дополнительная кинематическая цепь 12 может быть выполнена
в виде эксцентрикового валика 14, который установлен на опорах качения в каждом сателлите 5 и диске 13 (фиг.1). Эксцентриситет валика 14 равен эксцентриситету эксцентриковой оси 6.
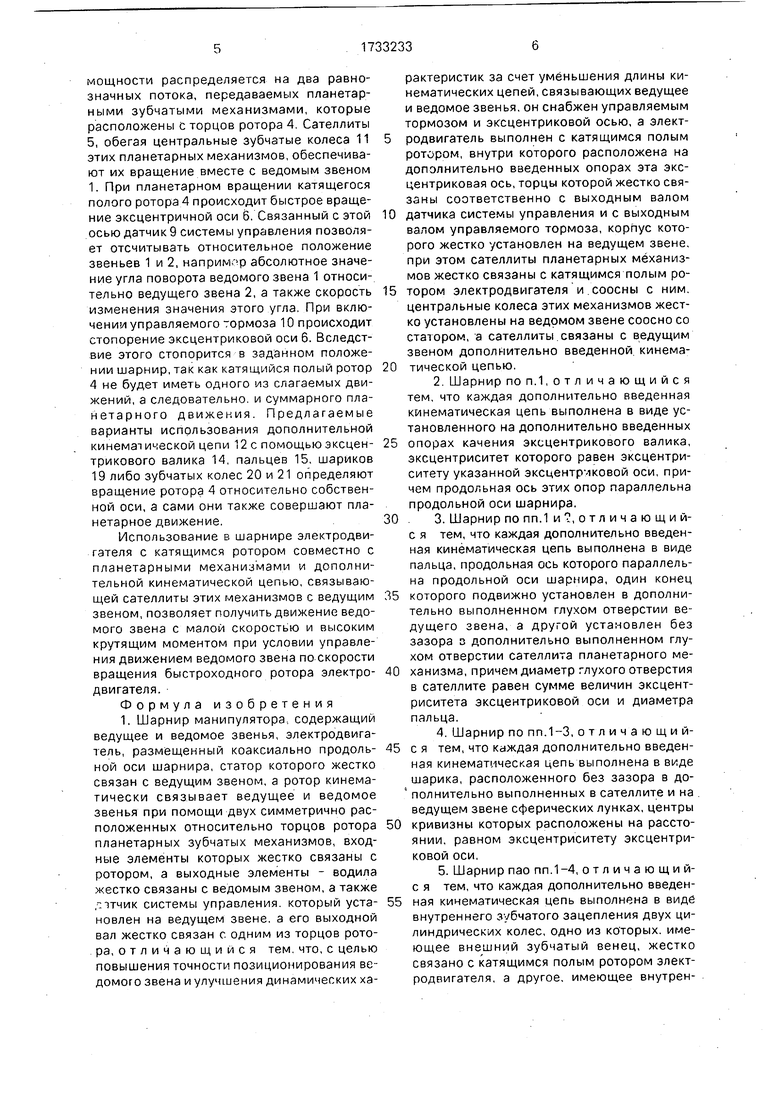
На фиг.2 изображен иной вариант исполнения дополнительной кинематической цепи 12. В данном случае используются пальцы 15, которые подвижно установлены
в дополнительно выполненных глухих отверстиях 16 на дисках 13 и без зазора уста- новпены в других дополнительно выполненных на сателлитах 5 глухих отверстиях 17. При этом диаметр отверстий 17
равен сумме эксцентриситета оси 6 и диаметра пальца 15.
Следующий вариант использования цепи 12 представлен на фиг.З. В данном случае используюся шарики 18, которые без
зазора установлены в дополнительно выполненных в сателлитах 5 и дисках 13 сферических лунках 19. Расстояние между центрами кривизны этих лунок 19 равно эксцентриситету оси 6.
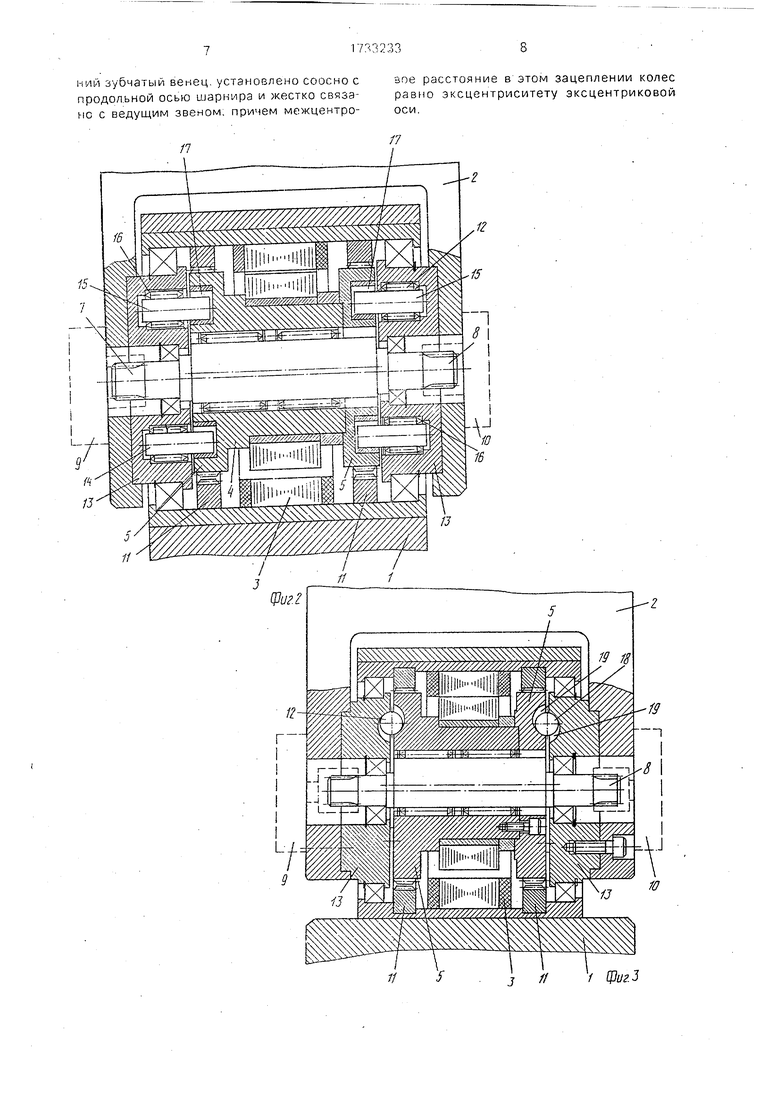
На фиг.4 представлено выполнение кинематической цепи 12 в виде внутреннего зубчатого зацепления цилиндрических колес 20 и 21. При этом зубчатые колеса 20 жестко связаны с катящимся полым ротором 4, а зубчатые колеса 21 с внутренними зубчатыми венцами установлены соосно шарниру и жестко связаны с ведущим звеном 2. Межцентровое расстояние в каждом зубчатом зацеплении колес 20 и 21 равно
эксцентриситету оси 6.
Шарнир работает следующим образом. При подаче энергии к статору происходит планетарное вращение катящегося полого ротора 4. Это планетарное движение
представляет собой суммирование двух движений - вращения ротора 4 относительно статора, которое определяется наличием электрического поля электродвигателя, и вращения ротора 4 относительно собственной эксцентричной оси, которое определяется наличием дополнительно введенной кинематической цепи 12. При этом поток
мощности распределяется на два равнозначных потока, передаваемых планетарными зубчатыми механизмами, которые расположены с торцов ротора 4 Сателлиты 5, обегая центральные зубчатые колеса 11 этих планетарных механизмов, обеспечивают их вращение вместе с ведомым звеном 1. При планетарном вращении катящегося полого ротора 4 происходит быстрое вращение эксцентричной оси 6. Связанный с этой осью датчик 9 системы управления позволяет отсчитывать относительное положение звеньев 1 и 2, например абсолютное значение угла поворота ведомого звена 1 относительно ведущего звена 2, а также скорость изменения значения этого угла. При включении управляемого тормоза 10 происходит стопорение эксцентриковой оси 6. Вследствие этого стопорится в заданном положении шарнир, так как катящийся полый ротор 4 не будет иметь одного из слагаемых движений, а следовательно и суммарного планетарного движения. Предлагаемые варианты использования дополнительной кинематической цепи 12с помощью эксцентрикового валика 14, пальцев 15, шариков 19 либо зубчатых колес 20 и 21 определяют вращение ротора 4 относительно собственной оси, а сами они также совершают планетарное движение.
Использование в шарнире электродвигателя с катящимся ротором совместно с планетарными механизмами и дополнительной кинематической цепью, связывающей сателлиты этих механизмов с ведущим звеном, позволяет получить движение ведомого звена с малой скоростью и высоким крутящим моментом при условии управления движением ведомого звена по скорости вращения быстроходного ротора электродвигателя.
Формула изобретения 1. Шарнир манипулятора содержащий ведущее и ведомое звенья, электродвигатель, размещенный коаксиально продольной оси шарнира, статор которого жестко связан с ведущим звеном, а ротор кинематически связывает ведущее и ведомое звенья при помощи двух симметрично расположенных относительно торцов ротора планетарных зубчатых механизмов, входные элементы которых жестко связаны с ротором, а выходные элементы - водила жестко связаны с ведомым звеном, а также ;:)тчик системы управления который установлен на ведущем звене, а его выходной вал жестко связан с одним из торцов ротора, отличающийся тем что, с целью повышения точности позиционирования ведомого звена и улучшения динамических характеристик за счет уменьшения длины кинематических цепей, связывающих ведущее и ведомое звенья, он снабжен управляемым тормозом и эксцентриковой осью, а электродвигатель выполнен с катящимся полым ротором, внутри которого расположена на дополнительно введенных опорах эта эксцентриковая ось, торцы которой жестко связаны соответственно с выходным валом
0 датчика системы управления и с выходным валом управляемого тормоза, корпус которого жестко установлен на ведущем звене, при этом сателлиты планетарных механизмов жестко связаны с катящимся полым ро5 тором электродвигателя и соосны с ним. центральные колеса этих механизмов жестко установлены на ведомом звене соосно со статором, а сателлиты связаны с ведущим звеном дополнительно введенной кинема0 тической цепью.
2 Шарнир по п.1, о т л и ч а ю щ и и с я тем, что каждая дополнительно введенная кинематическая цепь выполнена в виде установленного на дополнительно введенных
5 опорах качения эксцентрикового валика, эксцентриситет которого равен эксцентриситету указанной эксцентриковой оси, причем продольная ось этих опор параллельна продольной оси шарнира.
5 которого подвижно установлен в дополнительно выполненном глухом отверстии ведущего звена, а другой установлен без зазора з дополнительно выполненном глухом отверстии сателлита планетарного ме0 ханизма, причем диаметр глухого отверстия в сателлите равен сумме величин эксцентриситета эксцентриковой оси и диаметра пальца.
-г
и
5
з ft V фигЗ
SS
ш шштшшш%ш
13 //
2
11
| Заявка ФРГ № 3303555, кл В 25 J 17/02 1984 I |
