Изобретение относится к электротехнике, а именно к электропроводу одноковшовых экскаваторов, и может быть применено там, где связь между электродвигателем и механизмом осуществляется посредством каната.
Цель изобретения - повышение надежности за счет уменьшения перегрузок.
На фиг. 1 представлена функциональная схема электропривода; на фиг.2 - зависи- мость выходного напряжения блока нелинейности от входного.
Электропривод (фиг.1) содержит последовательно соединенные задатчик 1 скорости, регулятор 2 напряжения, регулятор 3 тока, управляемый преобразователь 4, двигатель 5 постоянного тока. Датчик 6 тока подключен к якорю двигателя 5, датчик 7 напряжения - к выходу управляемого преобразователя 4. Выходы датчиков 6 и 7 под- ключены к соответствующим регуляторам 3 и 2 и к входам датчика 8 упругой нагрузки. Выход последнего подключен к входу дифференциатора 9, выход дифференциатора - к входу блока 10 нелинейности, выход блока 10 нелинейности - к третьему входу регулятора 3 тока.
Устройство работает следующим образом.
При малых нагрузках, которые харак- терны для режимов, отличающихся от стопорного, например при отработке сигнала задания на перемещение рабочего органа экскаватора, выходной сигнал блока 10 нелинейности невелик, слабая обратная связь по производной от упорной нагрузки обеспечивает оптимальное для этих режимов де- мпфирование упругих колебаний, что способствует точному, без перерегулирования и колебаний отклику рабочего органа на команды машиниста. При стопорении резко
возрастает усилие в канате и сигнал на выходе блока нелинейности. Действует глубокая отрицательная обратная связь по производной, происходит реверс тока якоря, скорость двигателя быстро падает, благодаря чему канат не успевает сильно растянуться и усилие в нем ограничивается на уровне, незначительно (на 10-20%) превышающем заданное значение. При выходе из стопора, несмотря на большое по модулю значение производной от упругой нагрузки, обратная связь слабая, так как знак производной отрицательный, и блок нелинейности переходит на работу в третьем квадрате. Благодаря этому после выхода из стопора скорости двигателя и рабочего органа достигают установившегося значения без большого перерегулирования.
Формула изобретения Электропривод для одноковшового экскаватора, содержащий последовательно соединенные задатчик скорости, регулятор напряжения, регулятор тока, управляемый преобразователь, выход которого подключен к якорю двигателя, датчик напряжения, вход которого соединен с выходом управляемого преобразователя, а выход - с входом регулятора напряжения, датчик тока, вход которого подключен к якорю двигателя, а выход - к второму входу регулятора тока, датчик упругой нагрузки, первый вход которого подключен к датчику тока, второй - к датчику напряжения, и дифференциатор, вход которого соединен с выходом датчика упругой нагрузки, отличающийся тем, что, с целью повышения надежности за счет уменьшения перегрузок, в него дополнительно введен блок нелинейности, причем вход его подключен к выходу дифференциатора, а выход - к третьему входу регулятора тока.
-1,0
.
to .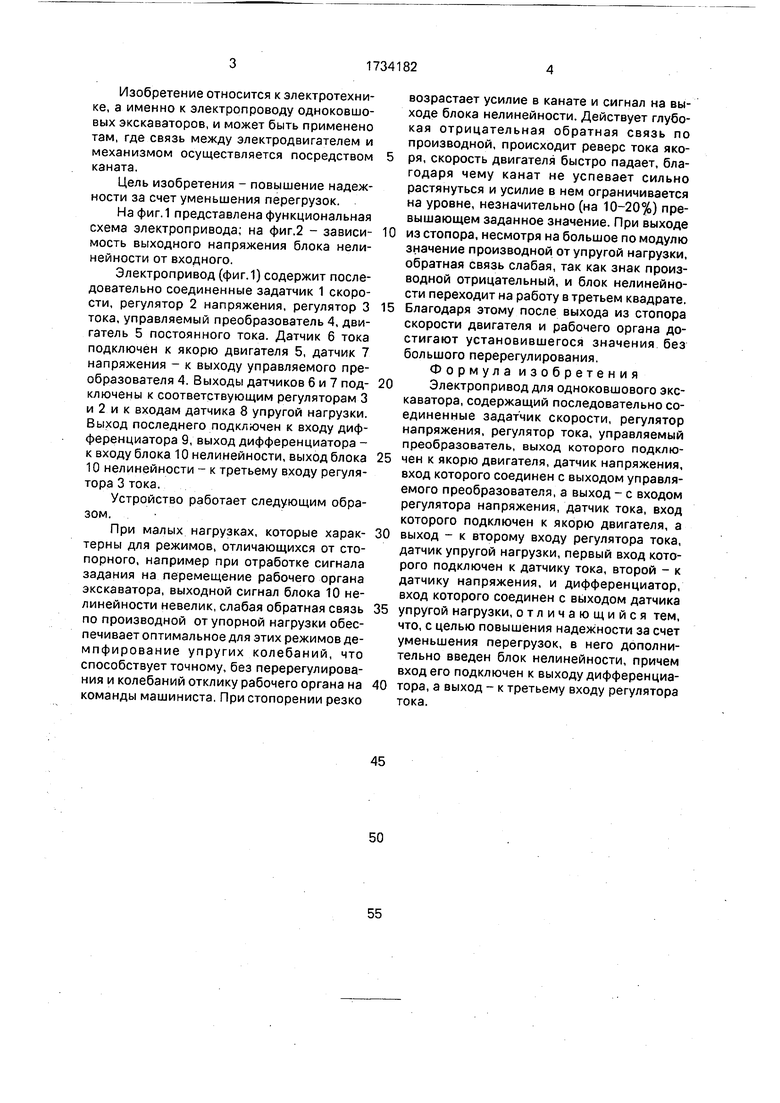
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод одноковшового экскаватора | 1990 |
|
SU1735995A1 |
| Устройство для управления копающимМЕХАНизМОМ эКСКАВАТОРА | 1978 |
|
SU798251A1 |
| Электропривод с ограничением динамических усилий в механизмах экскаватора | 1987 |
|
SU1582314A1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| СПОСОБ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ПРИВОДА ОДНОКОВШОВОГО ЭКСКАВАТОРА В ЭКСПЛУАТАЦИОННЫХ РЕЖИМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376422C1 |
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| Система подчиненного регулирования электропривода постоянного тока | 1974 |
|
SU506105A1 |
| Устройство для управления процессом выбора зазоров механических передач в двухдвигательном электроприводе поворота экскаватора | 1983 |
|
SU1129301A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах экскаваторов. Целью изобретения является повышение надежности за счет уменьшения перегрузок. Устройство содержит последовательно соединенные задат- чик 1 скорости, регулятор 2 напряжения, регулятор 3 тока, преобразователь 4, электродвигатель 5. Выходы датчика 6 тока и датчика 7 напряжения через датчик 8 упругой нагрузки и дифференциатор 9 соединены с входом блока 10 нелинейности. В данном устройстве коэффициент обратной связи по производной от упругой нагрузки максимален при стопорении рабочего органа и снижается в других режимах до оптимальной величины. 2 ил. fe V| 00 00 to фиг. 1
| Электропривод с упругой механической связью | 1984 |
|
SU1275723A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кирбабин Е.Н | |||
| Исследование и разработка систем управления электроприводом механизма поворота мощных одноковшовых карьерных экскаваторов | |||
| Автореф | |||
| дис., УДК 622.271.4:62-83(043.3), Московский горный институт, М., 1984 | |||
